|
27596| 3
|
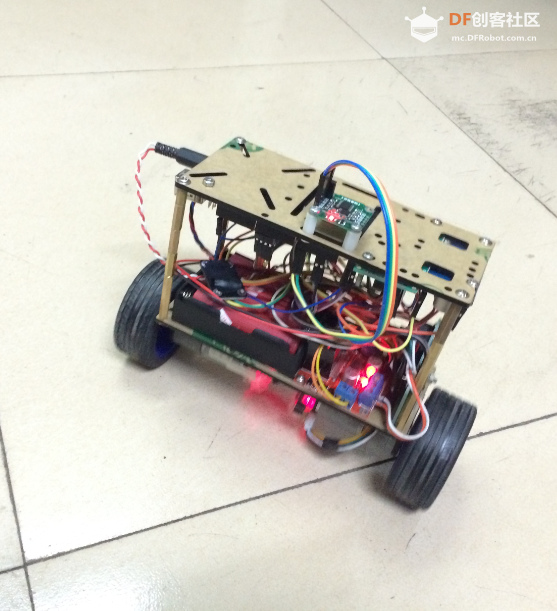
[项目] 基于Arduino+MPU6050+Tp-link 703n平衡小车 |
|
基于Arduino+MPU6050+Tp-link 703n平衡小车 基于工坊目前还没有一个帖子能很完整的介绍平衡小车的制作思路以及制作方案,借此机会我将制作成功后的经验分享给大家,由于该课题涉及到我们项目的部分,请允许我现在不能公开,但思路和方案我是可以告诉大家的。我希望能给一群爱学的同学们,钟爱电子制作的朋友们提供一点帮助,也算是我一年来在该论坛学到很多知识的回报吧。 希望各位懂行的高手不要嘲笑我的无知,更希望你们看了以后,能够多给我提供一些建议和更好的思路,总之,但愿我们能共同进步,或是说能有机会合作,那是理想的状态了。其他的话我就不多说了,我先给大家上图片和视频。 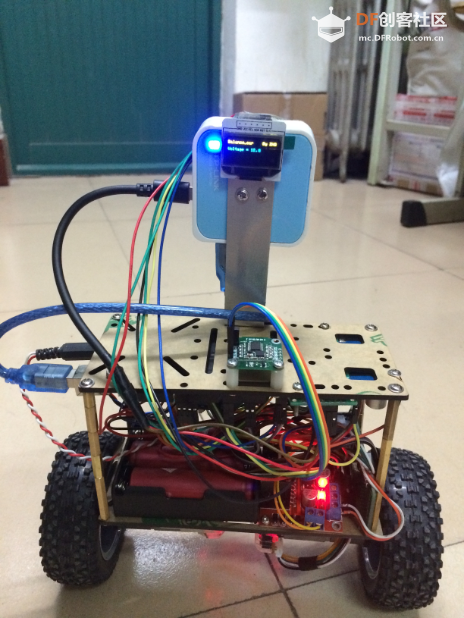 【元件清单】
 【控制算法】 1.PID(如此经典的算法,你能不用吗,尤其是学习自控原理的同学) Pwm_out = Kap*Angle[0] + Kad*w[0] + Ksp*speeds_filter + Ksi*positions ; //PID控制器 注释:
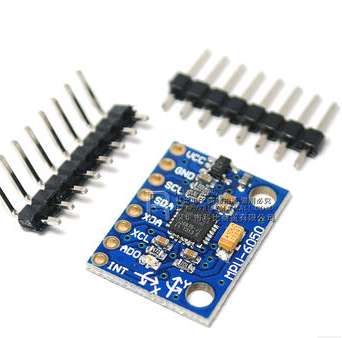
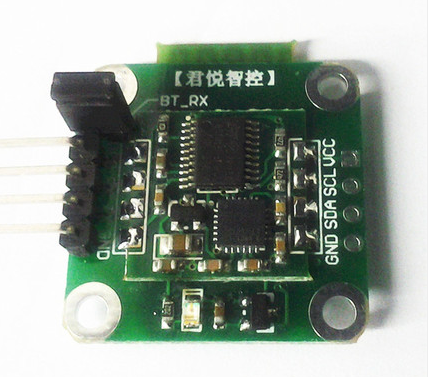
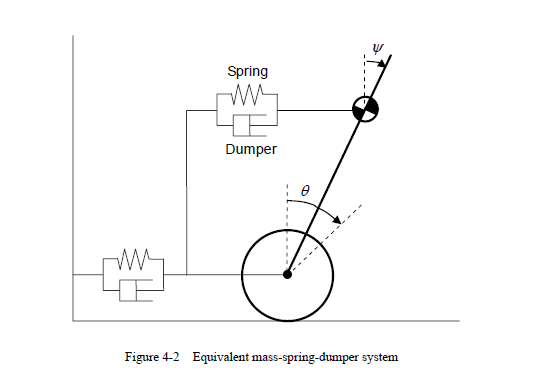 【平衡车模型】 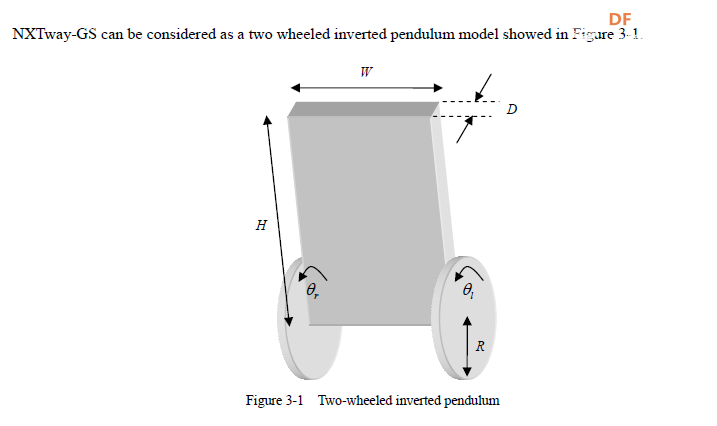 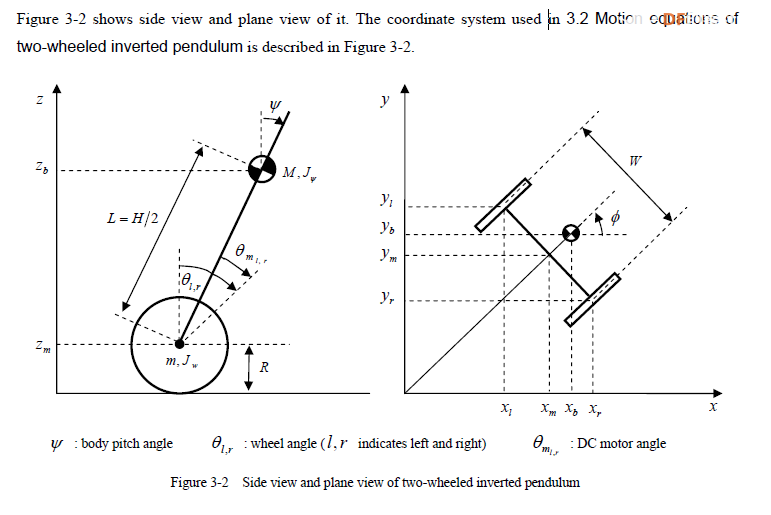 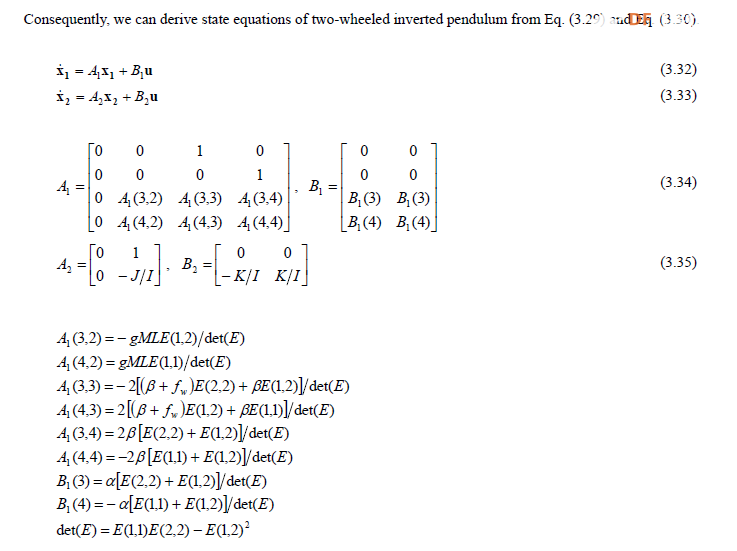 现在必然有人问我难道我们要建模吗?我强烈推荐学过自控原理和现代控制理论的同学建模,但可喜的是不建模也可以做平衡车,只是理解的不深刻罢了。现在上一段pid控制代码: 【关于MPU6050】 关于MPU6050有目前就应用方法有两种:
|



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 小蘑菇
小蘑菇
 荣誉教师
荣誉教师






