|
20881| 11
|
DIY海盗船机器人系列教程 第2话——红外开关避障功能 |
|
DIY海盗船系列 第2话 --- 红外开关避障功能 在完成基础功能后,我们对机器人来个升级,给它增加避障功能。避障功能,是机器人最基础的功能之一,也是机器人体现自主意识的第一步。避障机器人能够识别前方的障碍物,并避开前方障碍物。这里,我们选用到的是红外数字避障传感器,这是一款相当容易上手的传感器,非常适合初学者使用。该传感器可帮助机器人看到前方的物体。 硬件材料:

 组装步骤: 找到硬件材料后,就可以开始组装了,组装不难,更着操作就行。 STEP 1: 摆放材料 先找到固定红外开关传感器的3个支架,及需要使用的M3×6MM的螺丝和螺母若干。  STEP 2: 固定红外支架 这里只需将3个红外开关传感器的支架用螺丝拧在上层板上即可。需要注意的一点是,三个支架之间不要间隔太近。否则在检测的时候会造成接收错误信号。 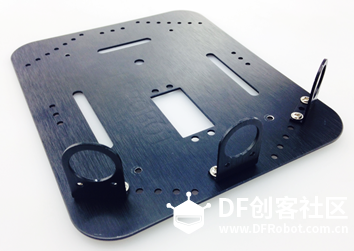 STEP 3: 安装红外传感器 先将一个固定环装到传感器上,将传感器从红外支架里往外穿过,并用另一个固定环将其固定住。同样方法安装另外两个。  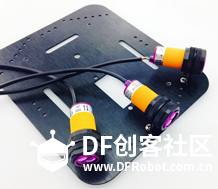 硬件连接: 传感器安装完成后,先不要急着把上层板接上去,需要将传感器与Romeo BLE控制器连接。左边这张图显示的是三个传感器ABC在小车上对应的位置,分别对应数字口的10,9,8。,连接时只需留意线序是否正确即可。 安装完成后,固定上层板。 黄色 - 信号线,红色 – VCC, 绿色 – GND。 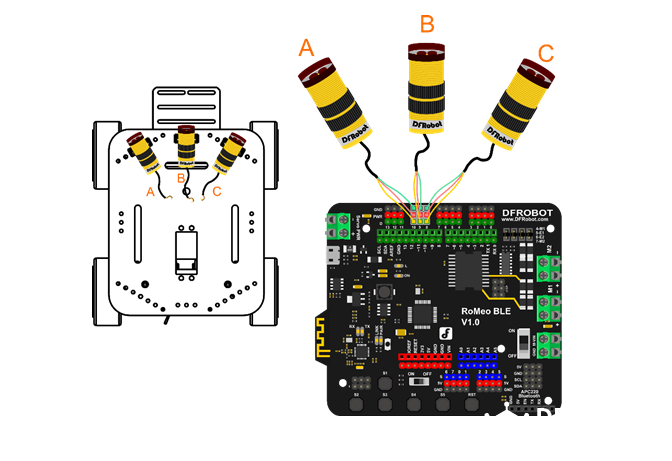 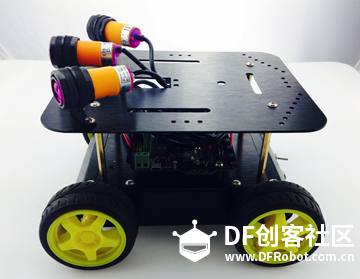 传感器调试: 红外接近开关是一种集发射与接收于一体的光电开关传感器。如果有信号,也就是前方有障碍物,传感器后侧指示灯亮的亮灭,检测距离可随传感器后侧的电位器进行调节,可调范围3-80cm。 下载代码前,需要对三个传感器的做调整,先插上USB线,给板子供电。下图白色圈出的位置可见有个一字螺丝,这个就是可用来调整检测距离。拿个小盒子(模拟障碍物),放在传感器探头前,找到传感器的探测点,一旦找到传感器上的指示灯会亮起。此时,可以拧转螺丝,调到一个合适的距离,推荐在15~20cm左右。 同样方法调整另外两个红外传感器,通常建议左右两侧的检测距离略大于中间的检测距离。  输入代码: 由于代码较长,所以这里就不全部显示出来,你可在软件包中找到Avoidance_IRSwitch.ino的代码,下载进去后即可。  下载完成后,你就可以看到小车的避障效果了。当然,如果你觉得检测距离还不是很满意,也可以做一些微调。直到能正常工作。玩过之后,我们就来简单看下避障原理以及学习下代码,便于你能更好的改造你的机器人! 避障原理: 通过下面a,b,c,d来简单看下如何通过三个传感器来实现避障。在前方没有障碍物的时候,小车前行(图a),一旦检测到前方有障碍物,先让小车后退(图b),然后执行左转(图c),当然这里你也可以右转。如果小车前方一直存在障碍物,小车将会一直执行后退左转,直到前方没有障碍物,小车保持前进。 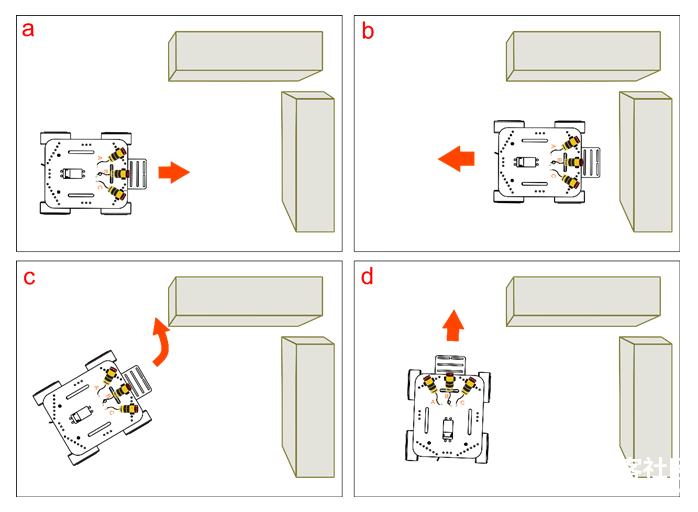 前面分析的这个场景是小车正前方有障碍物。思考下,如果小车左前方有障碍,或者小车右前方有障碍物,可让小车如何执行?清楚原理之后,我们来看下代码。 当然,这样的避障方式不是唯一的,你也可以有更好的避障方式,可由你自己设定,如果你的逻辑非常紧密,完全可以写出更出色的代码,毫无疑问的可以从你的代码中表现出来。何不试试用自己的思维来写一段控制代码。看完代码回顾,你就能游刃有余的改代码了。 代码回顾: 基础功能重复部分就不说了,只说下避障部分的。 用三个变量RightValue,MiddleValue,LeftValue分别记录3个传感器读到的值,digitalRead(pin)函数就是用来读取数字口的值,不明白的可以查看下语法手册。 红外数字避障传感器数字量传感器,当探头前方有障碍时输出低电平,无障碍物时输出高电平。 下面这段代码描述的就是避障原理中所说的那张情况 –- 正前方有障碍。三个传感器同时都检测到障碍物了,也就是输出值都为LOW时,小车先执行后退,再执行左转,前进。 同样,如果只有右侧传感器检测到障碍物,那么小车执行,后退,右转。 最后,如果前面没有障碍物的话,小车正常前进。 代码中还有这么一段。 同样是前方有障碍物,和我们一开始说的三个传感器同时检测到的区别在于,这种情况下,前方障碍物相对远一点,小车后退的速度慢一点。 这里,我们就用到通过Speed函数来调整速度了。根据代码的说明,能否自己尝试变换一下小车的速度,行动方向等等。 大改造: 代码就讲到这里,我们这里做的是一个避障机器人。其实,同样的传感器,改造一下就能成为跟踪机器人了。只是方式相反,这里是,检测到物体后避开,跟踪的话,则是检测到物体后,向物体方向靠近。想一下,给自己做个跟踪机器人。 PS:更多开源文件见附件Code啦~希望你能跟我一样做出一套自己的海盗船 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶



 活跃会员
活跃会员
 版主限定
版主限定
 牛X认证
牛X认证
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师






