|
40932| 4
|
[中级教程] Arduino教程中级 项目十 芝麻开门 |
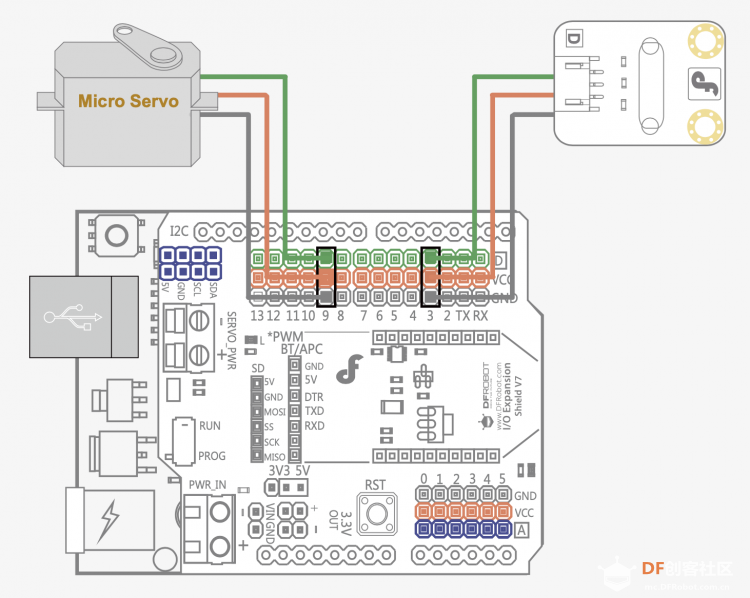
项目十 芝麻开门本系列教程为DF创客社区版权所有,配套硬件套件:新版Arduino中级套件 所谓芝麻开门,就是这门不是轻易能打开的,存在着某些玄关需要你去破解。我们这里设计的这个门,是通过不断晃动手中的传感器才能开。有人会说,传感器我知道是那个数字震动传感器,那门呢?你没看错就是舵机,它能控制角度。所以,所谓的门的转动,是靠舵机来完成的。做个来看下效果就知道了~ 所需材料1× 数字震动传感器 硬件连接TowerPro SG50 输入代码不断的晃动震动传感器,可以看到舵机的角度会随之变大。停止晃动后,舵机角度又开始慢慢减小。好比一扇门慢慢打开,合上。 代码回顾代码的开始先调用<Servo.h>库
这个库已经在Arduino IDE中了,可以打开Arduino-1.0.5/ libraries/ Servo/ Servo.h,这就是Servo库所在位置。 如果要在代码中用库中函数,是不能直接调用的,需要给库找个中介,让“他”建立代码和库中间的关系:
这里的myservo起到的就是这个作用。建立联系,之后调用库中的函数的话,就要按照下面这个模式进行:
中间那“.”不要漏了! 如何定义舵机是接到那个引脚呢?用到就是attach()函数了。
attach(pin)函数有一个参数——pin, 任意一个数字引脚(不建议使用数字0,1)。我们这里选择数字引脚9。
知道了如何定义一个舵机之后,如何把对应的角度写进去呢?
|

1.04 KB, 下载次数: 5005



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 版主限定
版主限定
 牛X认证
牛X认证
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师






