|
17469| 4
|
[HCRbot系列教程] HCRbot 系列 8──远程控制 HCRbot 机器人 |

|
下面是目前已经写好的所有篇章链接:
有时候,我们需要远程操控机器人去做一些任务,比如 SLAM 中的建图,我们就需要操控机器人在房间内运动。本章节提供了3种远程操控机器人的方法,分别键盘操控、游戏手柄操控和手机操控,下面分别介绍。 ## 使用键盘远程控制 HCRbot 请确保你已经运行了 【HCRbot 系列 7】章节相关内容,启动 HCRbot 机器人。 [Remote PC] 然后在远程电脑上运行键盘操控指令: [mw_shl_code=shell,true]roslaunch hcr_teleop keyboard_teleop.launch[/mw_shl_code] 然后根据提示用键盘上的相应按键控制 HCRbot 机器人运动,相信难不倒你~ ## 使用 Xbox 360 手柄远程控制 HCRbot 同样,请确保你已经运行了【HCRbot 系列 7】章节相关内容,启动 HCRbot 机器人。 [Remote PC] 然后在远程电脑上运行 Xbox 360 手柄操控指令: [mw_shl_code=shell,true]roslaunch hcr_teleop xbox360_teleop.launch[/mw_shl_code] 使用方法如下图: 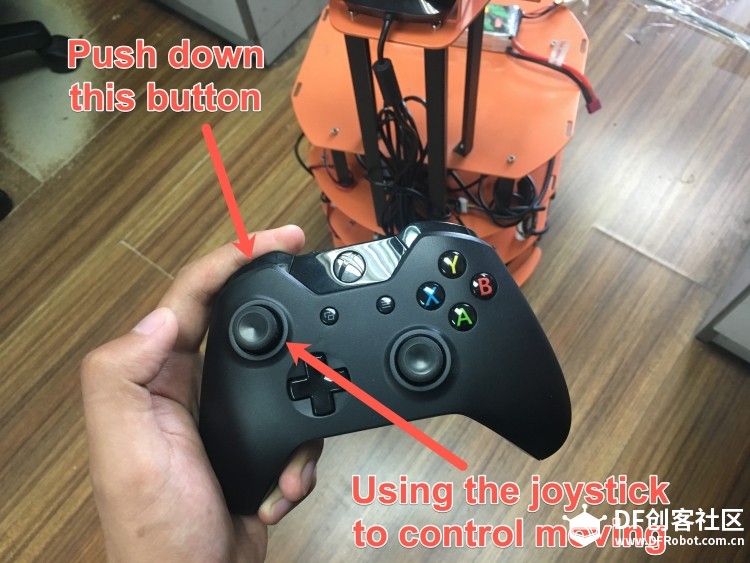 按住左上角的按键同时,去操作摇杆,HCRbot 机器人就回根据你的摇杆方向运动啦~ ## 使用 Android 手机远程控制 HCRbot 请先去 Google Play Store 上下载 ROS Control App。 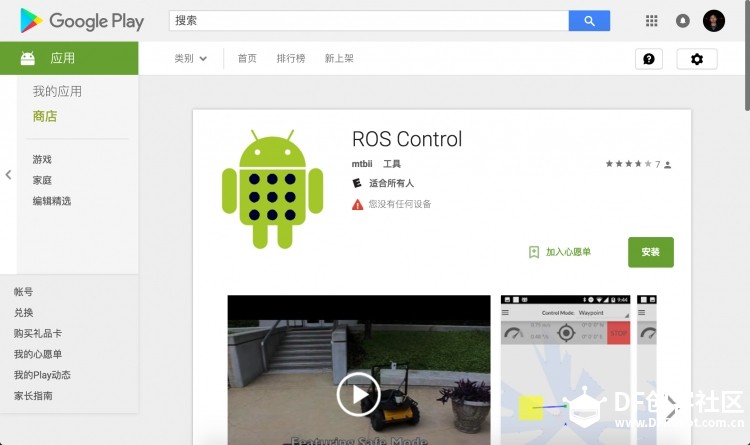 设置如下: 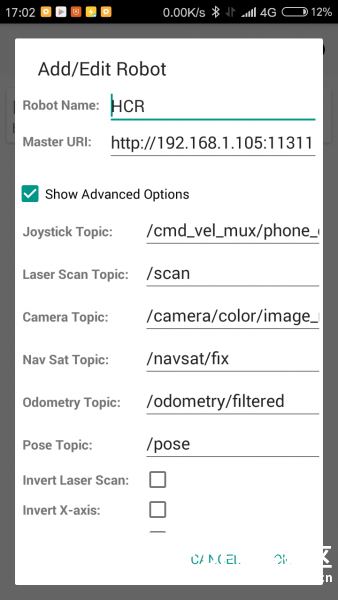 然后你就可以愉快的操控你的 HCRbot 啦,使用方法其实跟游戏手柄差不多,没什么难度,一定难不倒你的! 至此,本章结束,这应该是该系列最简单的一章了,下一章就可以开启高大上的地图绘制、自主导航了,我们下期见~ |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 老版主限定
老版主限定
 创作达人
创作达人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






