|
27299| 1
|
[入门] 【震动传感器】基于Mind+ Ardunio入门教程08 |
|
本帖最后由 DFEDU 于 2019-12-10 10:27 编辑 震动传感器,我们从名字中应该就可以判断,传感器能够检测震动中的物体。我们用什么来做震动传感器呢?那就是滚珠开关。滚珠开关,其内部含有导电珠子,器件一旦震动,珠子随之滚动,就能使两端的导针导通。 通过这个原理,我们可以做一些小玩具结合起来。最常见的,比如我们看到一些小孩子穿的一闪一闪的小鞋子!走动的过程,就能使内部珠子滚动。 只要传感器检测到东西震动,就会有信号输出。这里,我们想通过滚珠开关做个简单的震动传感器,并把震动传感器和LED的结合,当传感器检测到物体震动时,LED亮起,停止震动时,LED关闭。 所需元件 ■ 1× 滚珠开关 SW200D  ■ 1× 5mm LED灯  ■ 1× 220欧电阻  硬件连接 从滚珠开关这个名字,我们可以把它和什么联想在一起呢?就是按键开关,滚珠开关和我们项目三中介绍的按钮在硬件连接是完全相同的,原理也相似。只是使用方法不同而已。可以把下图对应项目三的一起看,你会发现很多相似之处。滚珠开关也需要一个下拉电阻,LED需要一个限流电阻。 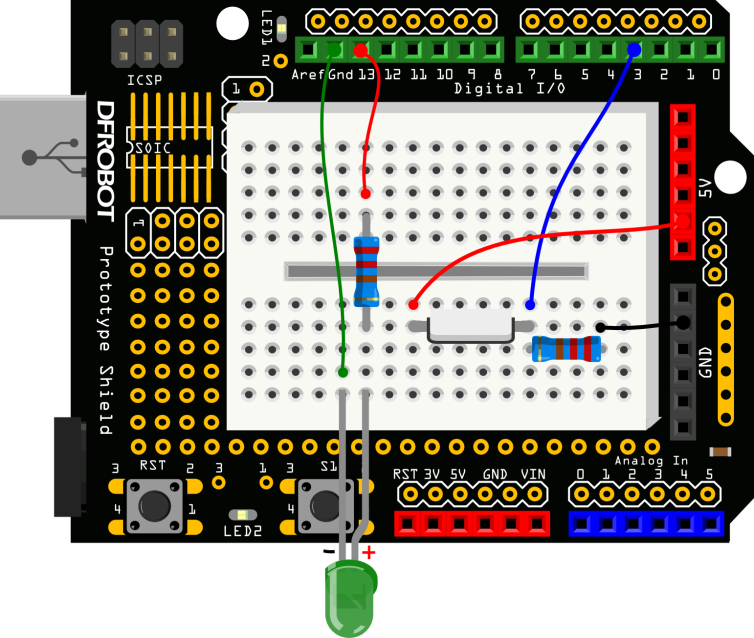 图 8-1 震动传感器连线图 代码编程 输入样例代码8-1 [mw_shl_code=c,true]//项目八 – 震动传感器 int SensorLED = 13; //定义LED为数字引脚13 int SensorINPUT = 3; //连接震动开关到中断1,也就是数字引脚3 Volatile unsigned char state = 0; void blink(); //使用任何函数前,必须先声明 void setup() { pinMode(SensorLED, OUTPUT); //LED为输出模式 pinMode(SensorINPUT, INPUT); //震动开关为输入模式 //低电平变高电平的过程中,触发中断1,调用blink函数 attachInterrupt(1, blink, RISING); } void loop(){ if(state!=0){ // 如果state不是0时 state = 0; // state值赋为0 digitalWrite(SensorLED,HIGH); // 亮灯 delay(500); //延时500ms } else{ digitalWrite(SensorLED,LOW); //否则,关灯 } } void blink(){ //中断函数blink() state++; //一旦中断触发,state就不断自加 }[/mw_shl_code] 当我们晃动板子时,LED灯也会随之亮,一旦停止晃动,LED灯又恢复到熄灭的状态。 代码学习 代码虽不长,但还是不太容易理解的。先大致说下代码的运行过程。 在没有任何打扰的情况下,程序在不断运行着…,让LED一直处于关闭。突然,被人打扰了(也就是晃动板子),就跳到中断函数blink()中(当然进入中断也是要条件的,我们后面说)。此时,state不断自加,产生连锁反应,主函数中if函数检测到state不为0了,那么就让LED亮起了,同时又重新让state为0,等待下一次中断。如果没有中断的话,LED又恢复到关闭的状态。 简单说了下程序的运行过程,重复的知识点就不做说明了。就重点说下中断函数attachInterrupt()。 中断 什么是中断?打个比方吧,比如你在家好好的看电视,突然家里电话铃响了,那么你不得不停下看电视,先去接电话,等接完电话后,你又可以继续看电视啦!在整个过程中,接电话就是一个中断过程,电话铃响就是中断的标志,或者说是中断条件。 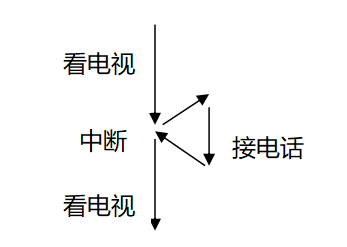 现在知道中断是什么意思了,再回到attachInterrupt()函数,它是一个当外部发生中断时,才被唤醒的函数。区别于其他函数,它依附于中断引脚才发生。Arduino UNO板有两个外部中断引脚:数字引脚2(中断0)和数字引脚3(中断1)。中断0与中断1是中断号,在函数中需要用到。不同板子,中断号对应引脚可能不同,可以查阅Arduino官方编程语法手册。 attachInterrupt() 需要三个传递参数:  interrupt:中断号0或者1。 如果选择0的话,连接到数字引脚2上,选择1的话,连接到数字引脚3上。 function:调用的中断函数名。 写中断函数时,需要特别说明以下三点: 我们写中断函数的时候,该函数不能含有参数和返回值。也就是说,要是一个无返回值的函数。 中断函数中不要使用delay()和millis()函数,因为数值不会继续变化。 中断函数中不要读取串口,串口收到的数据可能会丢失。 mode:中断的条件。 只有特定的以下四种情况: LOW:当引脚为低电平时,触发中断。 CHANGE:当引脚电平发生改变时,触发中断。 RISING:当引脚由低电平变为高电平时,触发中断。 FALLING:当引脚由高电平变为低电平时,触发中断。 知道了attachInterrupt()函数的用法,回归到我们的代码中: attachInterrupt(1, blink, RISING); 对应上面说明看:1,指中断号1。所以滚珠开关接到数字引脚3;blink是我们下面要调用的中断函数;RISING,指引脚3在由低变为高的一瞬间,中断触发。 为什么要选RISING呢?由于硬件我们还没提到,我们就先滚珠开关想象成按键。在按键没按下的时,是断开的,引脚3处于低的状态。一旦被按下,就和5V导通,变为高。这个过程是引脚由低电平变高电平的过程,所以选择RISING模式。 硬件回顾 滚珠开关 滚珠开关,也叫做珠子开关,震动开关等等。虽然叫法不同,不过原理是相同的。就是通过珠子滚动接触导针的原理来控制电路的通断。看下结构图就明白了。  图 8-2 滚珠开关内部结构图 滚珠开关内部两个珠子,通过珠子滚动接触导针的原理来控制电路的接通或者断开。传感器震动或者晃动时,珠子就会接触导针,从而导通。还需要注意的一点是,由于滚珠开关的内部构造,滚珠开关只有一头是导通的,金色导针一端是导通的,银色导针一端是不导通的。这也就是为什么,往金色一端倾斜,灯会点亮,而偏向银色一端倾斜时,灯不会被点亮的原因。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







