|
12101| 1
|
[进阶] 快乐智造营 | 11 遥控电风扇 |
|
本系列教程主要分享基于开源硬件和激光建模的创客作品的制作,每个作品涉及两三个电子模块的使用,让学习者能够轻松、扎实地掌握创客制作的知识和技能,并体会到智造的乐趣。 【目录】 5.快乐智造营 | 05 台灯9.快乐智造营 | 09 桌面温度计10.快乐智造营 | 10 多功能测量仪11.快乐智造营 | 11 遥控电风扇 本项目的源程序及激光建模图纸文件在附件中,可免费下载! ※11.1项目概述  图11-1 遥控器,早已成为了家用电器的标配,而其中使用得最广泛的还是红外遥控器。“遥控电风扇”,如图11-1所示,是一个通过红外遥控器来控制开关、风速和摇头的电风扇模型。通过该项目的学习,可以掌握360°舵机和红外线接收传感器的使用。 作品功能:按下遥控器上的相应按键可实现控制风扇的开关、调整风速和开启摇头等功能。 演示视频 ※11.2材料准备  图11-2 本项目所需要的硬件材料,如图11-2所示,分别为: (1)Arduino Uno 1块 (2)IO扩展板 1块 (3)180°舵机 1个 (4)360°舵机 1个 (5)红外遥控套装 1套 ※11.3 电子模块的使用 11.3.1 360舵机 360°舵机区别于180°舵机之处在于它取消了内部的硬件限位。只能够控制舵机的旋转方向和旋转速°,不能控制旋转角°。功能上更趋向于自带电机驱动的电机,可以控制正反转、停止。相对于普通直流电机,360°舵机不需要额外的电机驱动组件,即插即用,小巧方便。 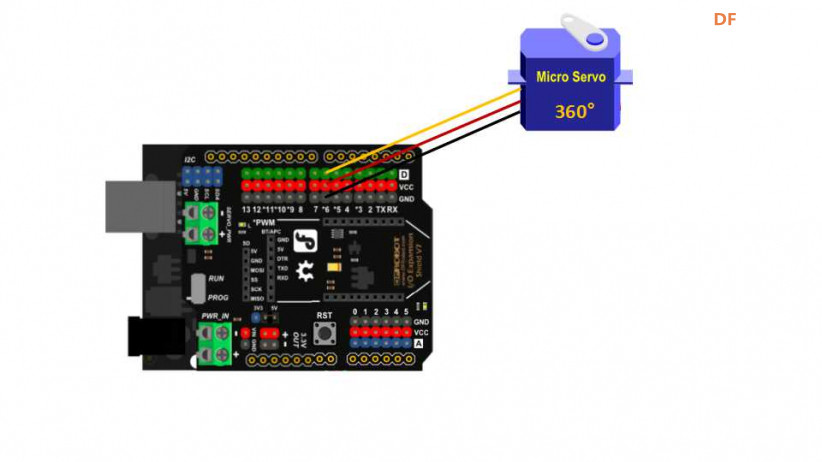 图11-3 在与Arduino Uno主控板连接时,可以连接到除D0、D1外的任何一个引脚。连接示例如图11-3所示,VCC、GND、数据三个引脚要分别对应。360°舵机和180°舵机的连接线相同,一般黄色或者橙色为数据线,其他两根为VCC和GND。  图11-4 在编程软件Mind+中,其对应的积木是【设置引脚(2)以(50)%额速°(正转)】,如图11-4所示;需到【扩展】中的【执行器】下找到【360°微型舵机】,然后选择添加才会在积木区出现。 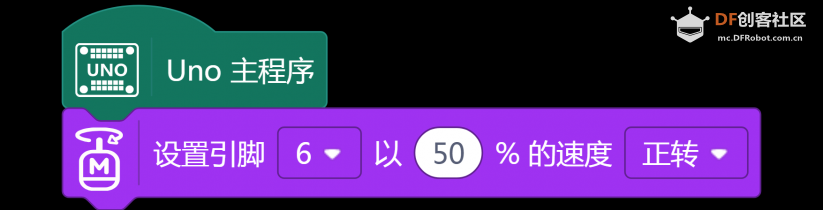 图11-5 按如图11-5所示编写程序,上传到设备。运行结果为:连接在引脚6上的360舵机以50%的速°顺时针旋转。我们可以通过修改速°和旋转方向两个参数来实现需要的旋转状态;需要注意的是,并没有直接的停止参数可选,将速°设为0%即可实现停止。 11.3.2 红外线接收传感器 常用的红外线接收传感器,可接收标准38KHz调制的遥控器信号,通过对主控板进行编程,即可实现对遥控器信号的解码操作。发射器可以是配套购买的遥控器,也可以是家用电器的遥控器。 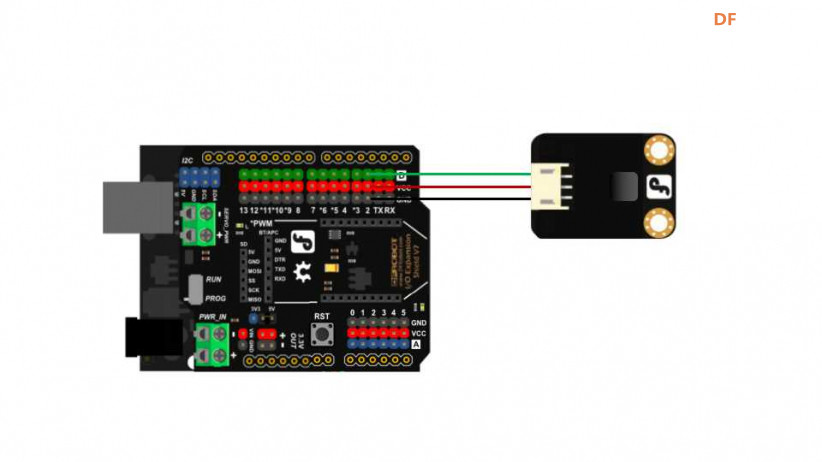 图11-6 在与Arduino Uno主控板连接时,可以连接到D2或者D3引脚。连接示例如图10-6所示,VCC、GND、数据三个引脚要分别对应。  图11-7 在编程软件Mind+中,其对应的积木是【读取引脚(2)红外接收值】,如图11-7所示;需到【扩展】中的【通讯模块】下找到【红外接收模块】,然后选择添加才会在积木区出现。  图11-8 在制作项目前,需要先知道遥控器上的各个按键的码值。我们可以通过串口打印的方式进行。将红外接收传感器连接到D2引脚,按照图11-8所示编写程序,上传到主控板;打开串口打印,按下遥控器上的按钮,将看到如图11-9所示的结果。  图11-9 在大多数编程软件中,显示的红外码值是十六进制的数值。在编程软件Mind+中,红外码值不能赋给数字类型变量,只能赋给字符串类型变量。我们需要将这些码值和对应的按键名称记录下来,以便后面使用。 ※11.4 项目制作 11.4.1 硬件搭建 将红外接收传感器连接到D2引脚,将180°舵机连接到D11引脚, 将360°夡连接到D6引脚,如图11-10所示。 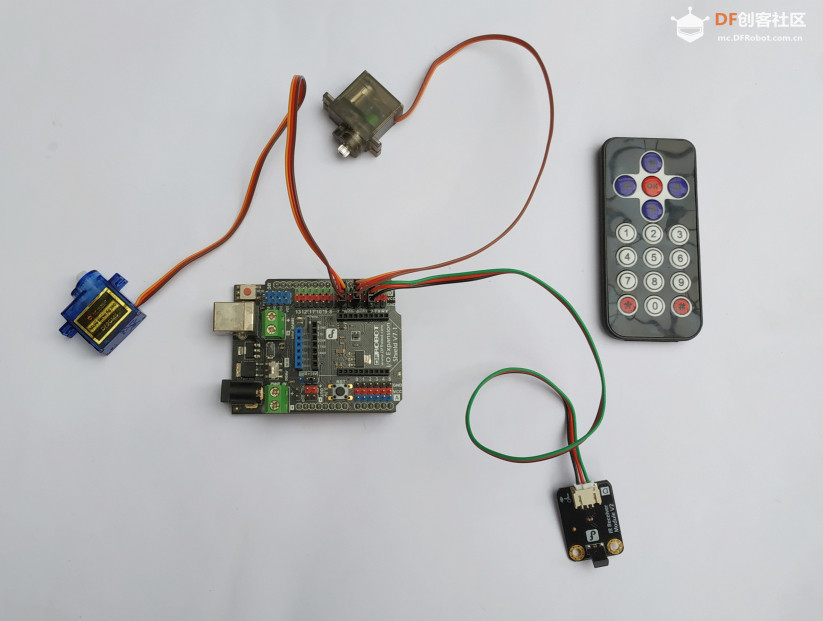 图11-10 11.4.2 编写程序 编程思路: (1)开机后,将180°舵机(作为摇头机构)设置为90°方向; (2)当按下“1”、“2”、“3”后,分别使360°舵机以30%、65%、100%的速°正转; (3)当按下“0”后,分别使360°舵机以0%的速°正转,即停止转动; (4)当按下“*”后,180°舵机从30°—150°进行往返转动三次; (5)当按下“#”后,将180°舵机重置为90°方向。 根据编程思路,编写出程序,示例程序如图11-11所示。编好程序后,上传到设备,进行初步的测试。   图11-11 11.4.3 设计切割外型 使用激光建模软件LaserMaker进行外型的设计,设计图如图11-12所示。 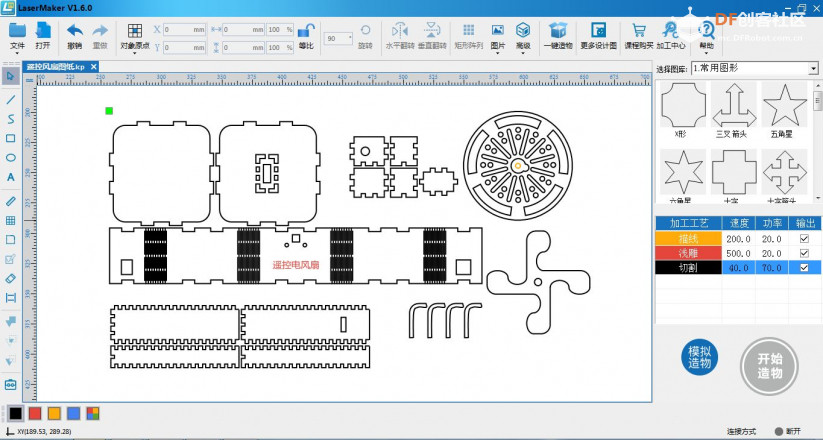 图11-12 图纸设计好后,使用激光切割机进行切割。切割好的零件如图11-13所示。 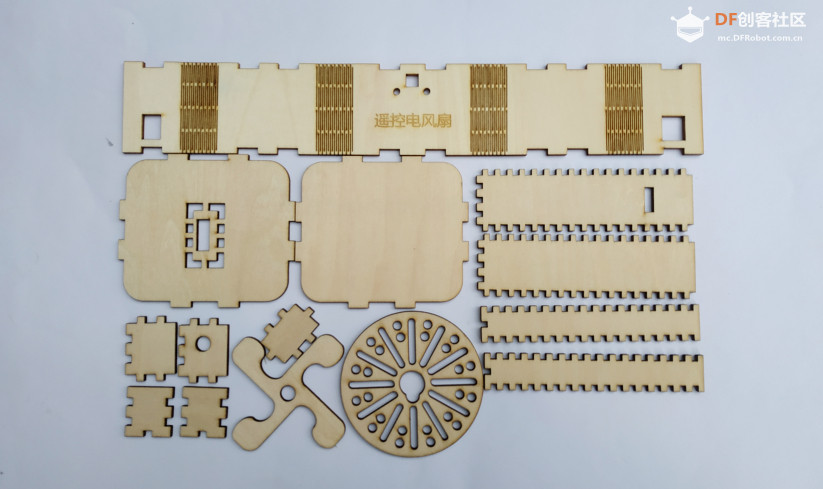 file:///C:\Users\ADMINI~1\AppData\Local\Temp\ksohtml5996\wps13.png 图11-13 11.4.4 装配调试 11.4.4.1 组装 将切割好的木板和硬件进行组装,步骤如图11-14、11-15所示。 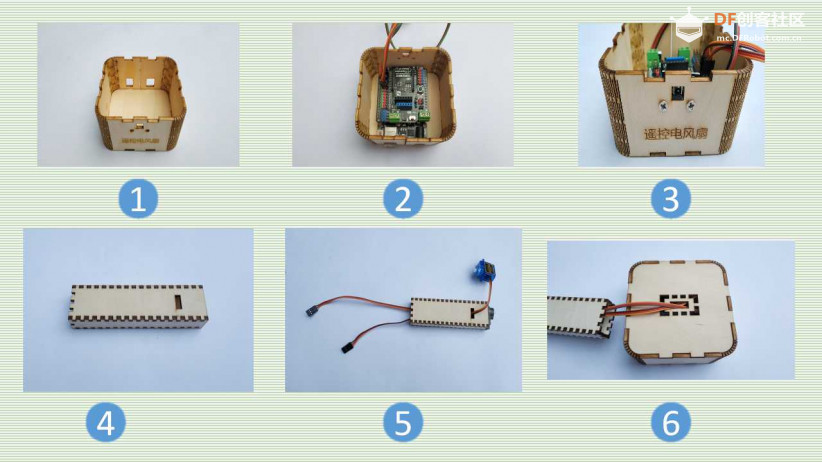 图11-14 (1)组装底座底板和侧板 (2)固定主控板 (3)安装红外接收传感器 (4)组装立柱 (5)拔下舵机连接线,穿入立柱 (6)将舵机重新连接到扩展板上,合上底座盖板 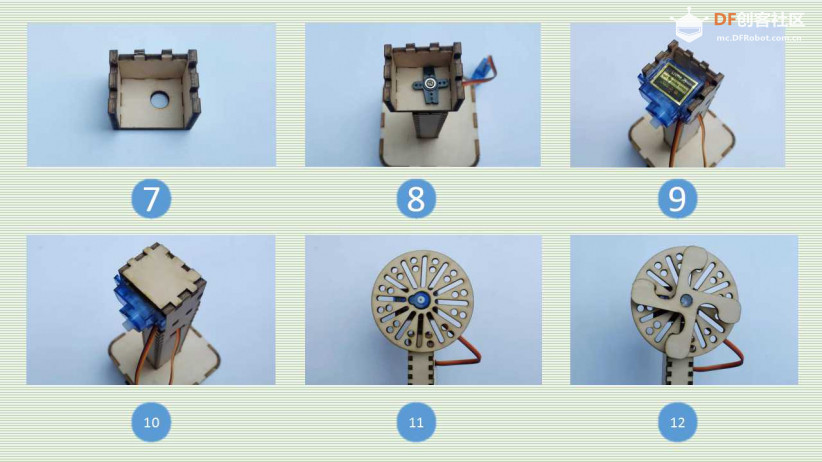 图11-15 (7)组装360°舵机外壳 (8)将舵机外壳安装在180°舵机上 (9)装入360°舵机 (10)合上顶板 (11)安装网罩 (12)安装扇叶 11.4.4.2 调试 安装好后,通电测试。你可能需要对一些参数进行调整,以达到较理想的效果。比如,风扇旋转的速度、摇头的角度及速度等。 ※11.5 思维拓展 前面做过的项目中,使用了数字按钮模块的有不少,能不能使用这节课学的红外遥控方式进行改造?不妨试一试。 你觉得使用红外接收传感器还能制作哪些项目?  本人编写的创客编程教育入门教材已经由清华大学出版, 朋友们可以了解一下,或许对您有帮助。 天猫、淘宝、京东、当当等线上商城均有销售 京东当当经常有促销活动!!! |

2.15 MB, 下载次数: 2759
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







