|
15370| 17
|
自制一个基于ESP32的沙画机器人 |

 作者在高二的时候就做过一个非常基础的沙画机器人,现在准备去普渡大学上学了,正好也打算带上它,于是想着用这俩年新学到的技能重新设计一下之前的沙画机器人。   所需材料
步骤1:Fusion 360 我设计这个动态沙画机器人时非常轻薄,打印后高度不到3英寸(7.62 厘米)!有很多重叠的零件,主要集中在大尺寸的Theta齿轮连接到底板的地方。整个机器人是使用Fusion 360从零开始设计的,并且我通过Fusion Team在线共享了它们。 我从草图开始设计外壳的大致形状,然后沿着大悬挑部分分割它,确保可打印。然后我构建了机器人底板,建模了懒人转盘轴承和中央齿轮组合。 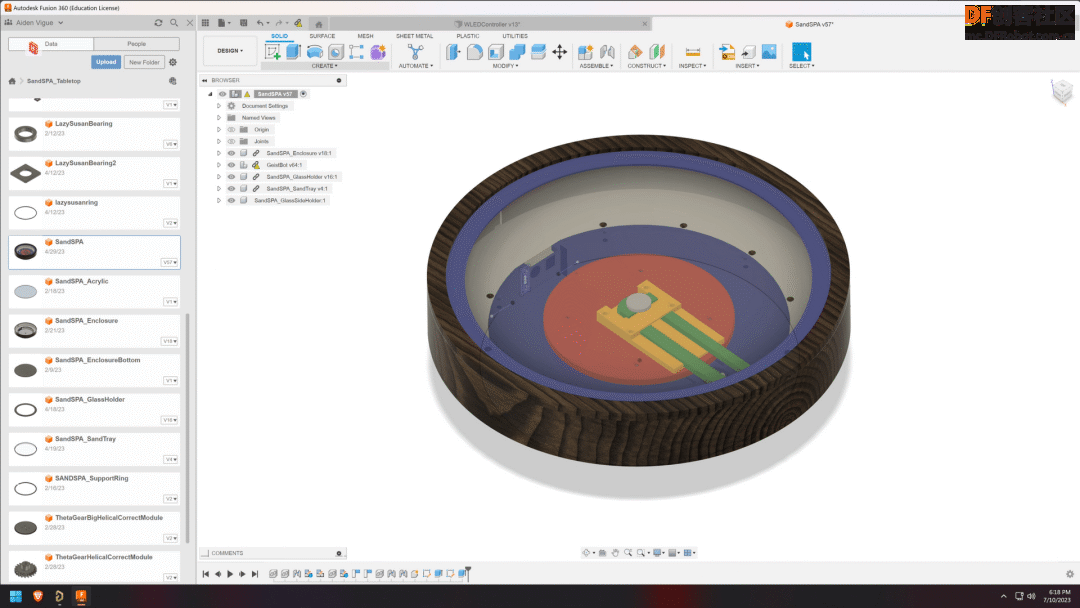 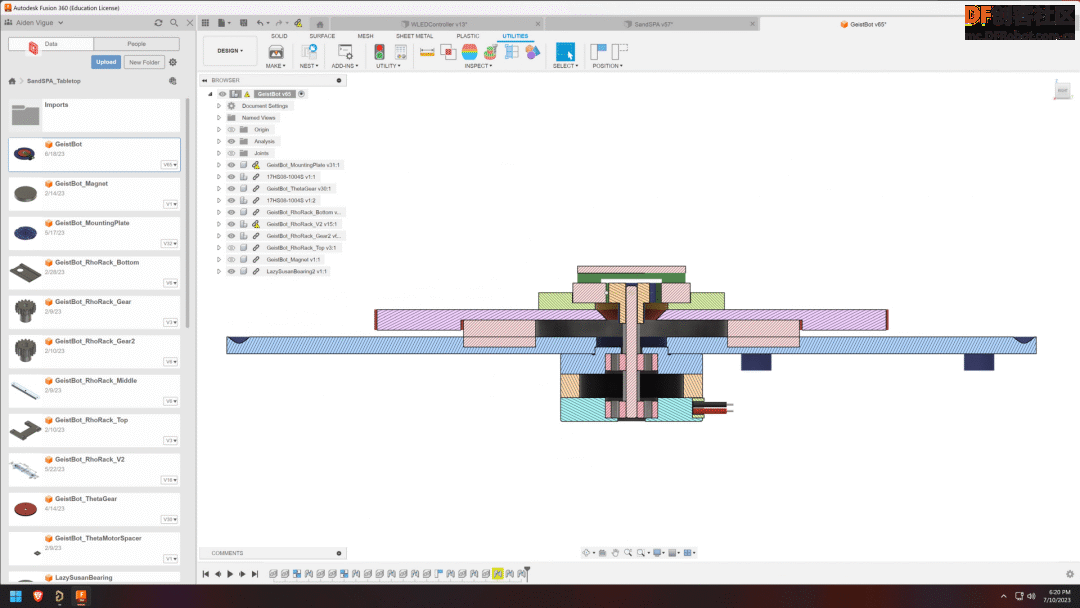 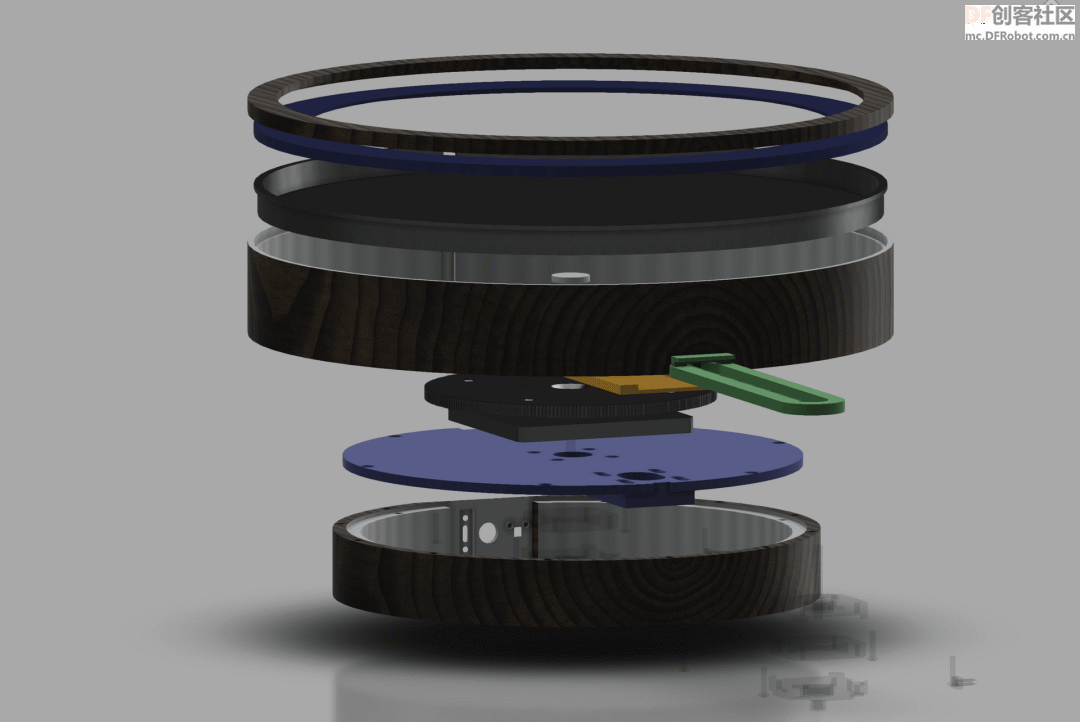 附上机器人组装的剖面和**视图,好让大家更详细地了解它们如何组装。 步骤2:3D打印 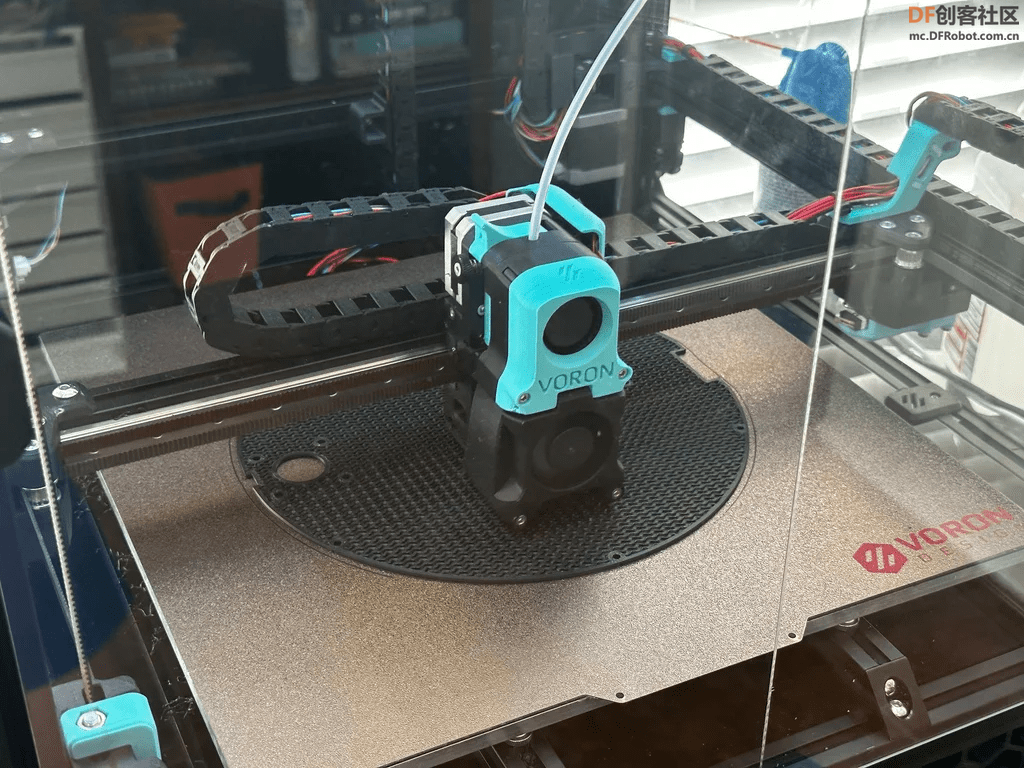   我用黑色Polymaker ABS打印了所有零件,使用30-50%的gyroid填充,具体取决于零件的情况。通常,内部组件使用50%的填充率,而外壳则打印足够的壳材使其坚固。我几乎用光了为这个项目购买的3公斤的线材。 如果使用PLA(聚乳酸),在抵抗扭曲变形方面会有更好的效果,然而我需要ABS(丙烯腈-丁二烯-苯乙烯)的结构性能。 附上的照片展示了测试安装线性轴和导轨的情况。 步骤3:机器人组装 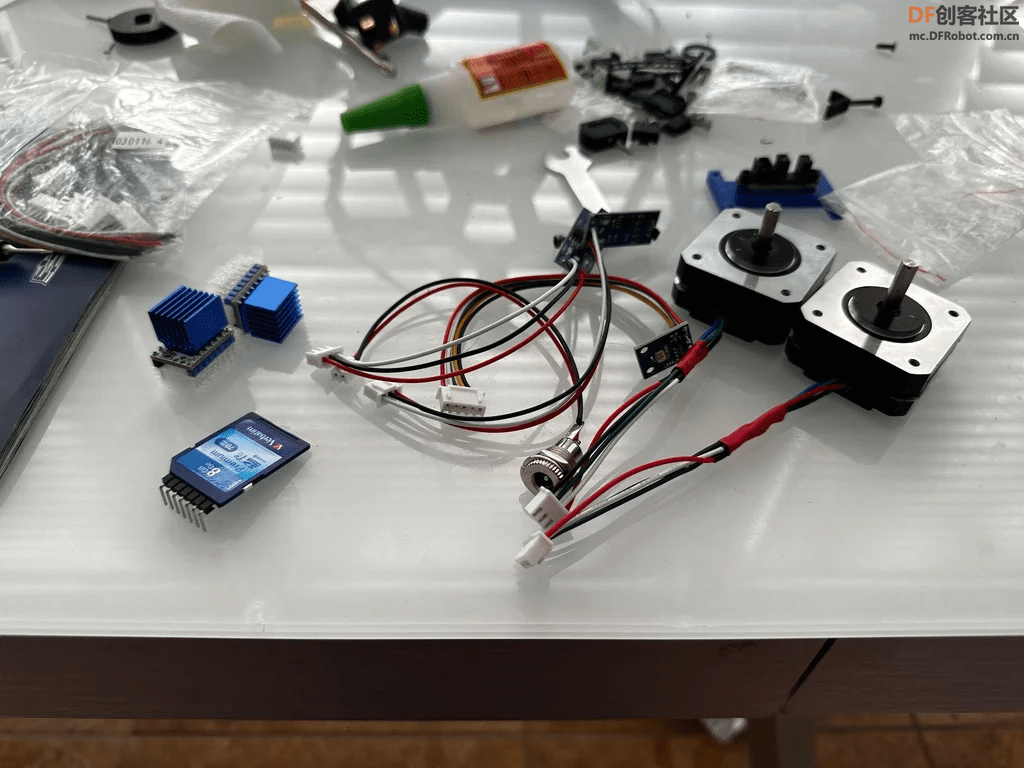  我在步进电机上加了4引脚的JST连接器,给TSL2561光传感器加了一个5引脚的连接器,并在磁性限位开关和LED灯带上都添加了3引脚的连接器。 然后,我用嵌头M3螺丝将theta步进电机安装到机器人底盘上。接着,我把GT2滑轮安装在电机上,用M3螺丝把懒人轴承固定在大的中心theta齿轮和下底盘上。轴承应该能够直接嵌入位置,不会摇晃。在Fusion组装中,如果轴承出现摇晃,可以使用额外的间隔器。直线轴和导轨用热塑插件直接固定在theta齿轮的顶部。 步骤4:PCB设计 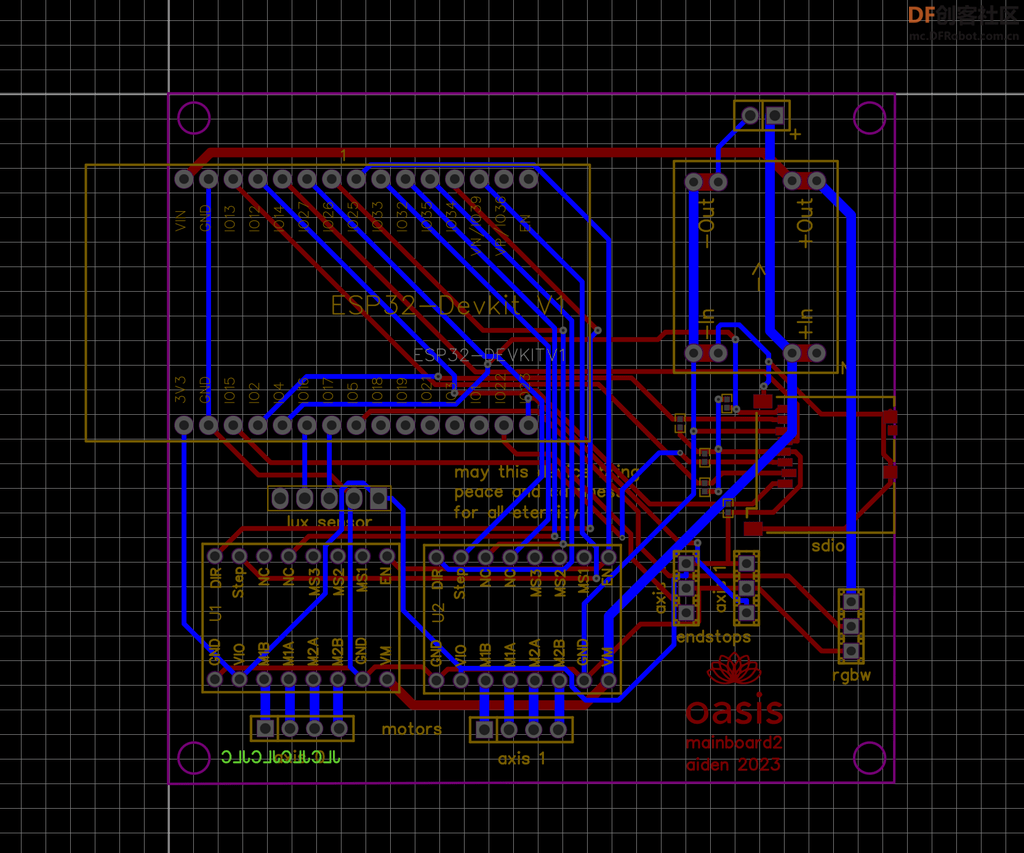 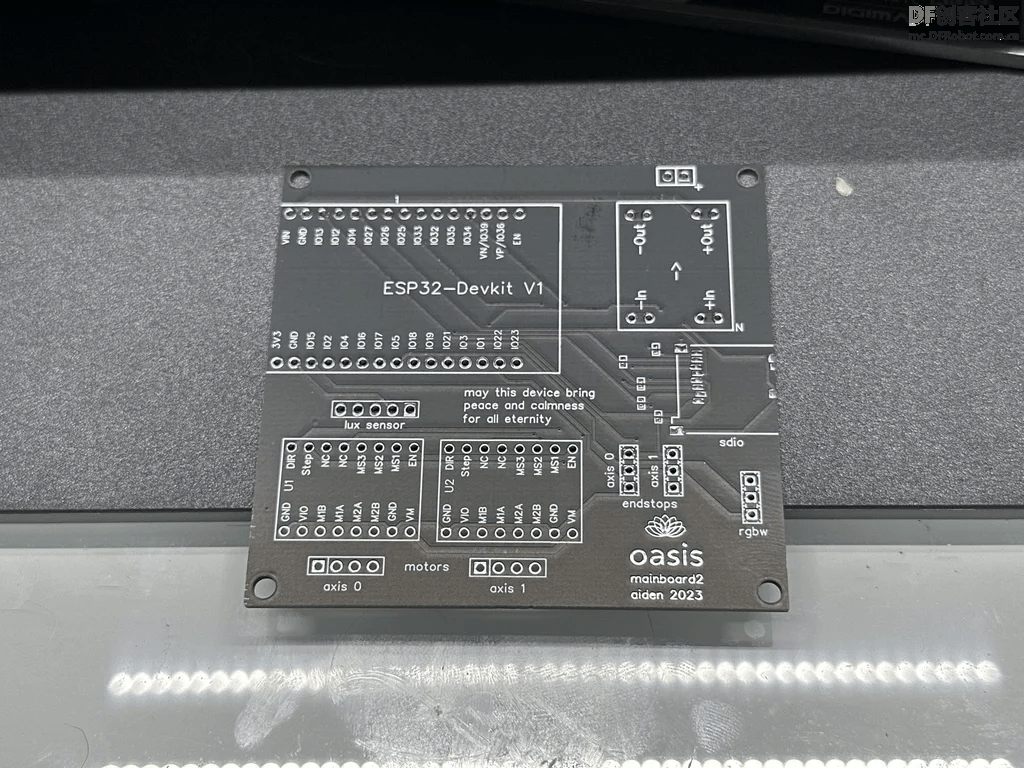 设计文件可以在这个网站获取:https://oshwlab.com/acvigue/sandscara 步骤5:PCB组装 我直接焊接下了马达驱动器、ESP32以及JST连接器。我添加了一个可选的SD卡插槽,它与MPN#47352-1001(Mouser[1])是兼容的。我使用尖细的焊接头和一些无需清洁的焊膏手动焊接了这个连接器。 步骤6:连接所有部件  我安装了一个磁性端止器传感器,安装在中心的微小孔上,用来感知Theta齿轮到达已知位置的情况。 完全组装好的机器人底板只需滑入外壳的中间部分。 步骤7:组装外壳 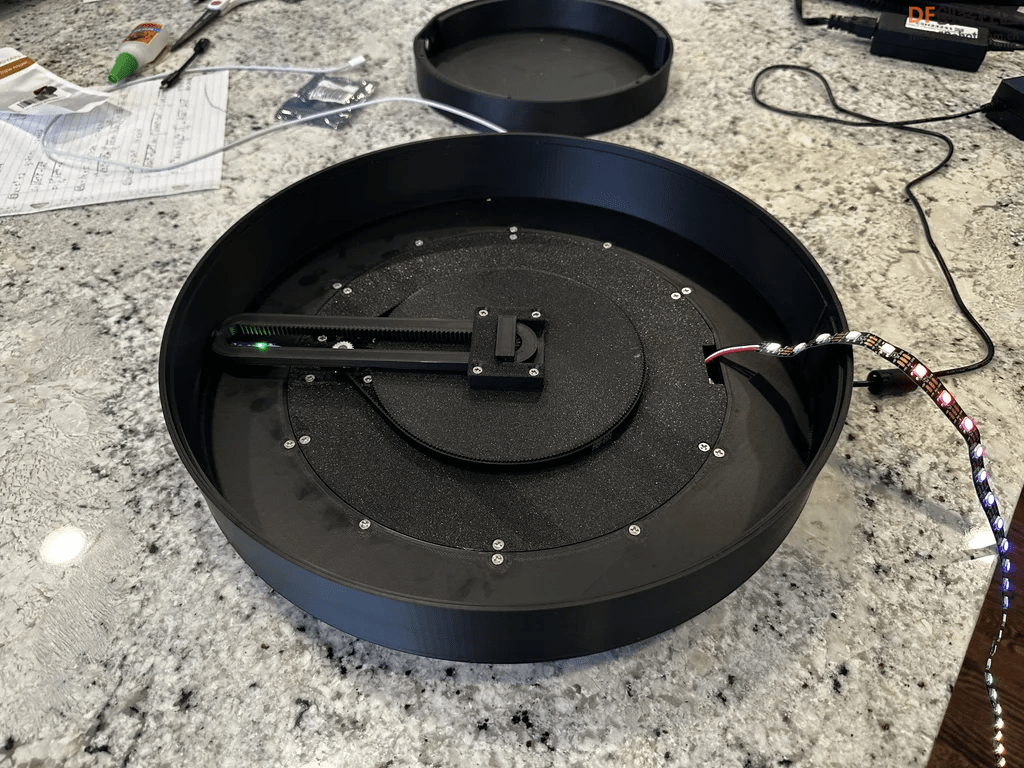  将上半部分的外壳放在下半部分上。用防塌塞的铆入螺套和12颗10mm M3螺丝将其固定。 步骤8:加入沙子  我使用家里的一些普通工艺毡布,通过喷雾胶把它粘在沙床的底部,这样可以让沙床工作的时候更加安静。然后,我就把家得宝(Home Depot)的沙倒进去,用一把黄油刀将其均匀铺开。 步骤9:灯光  我用双面海绵胶带把LED灯带粘在沙床的两侧,并将3根导线(5V数据和地线)从侧面的小缝隙穿过,延伸到主控板。 步骤10:编译Web界面 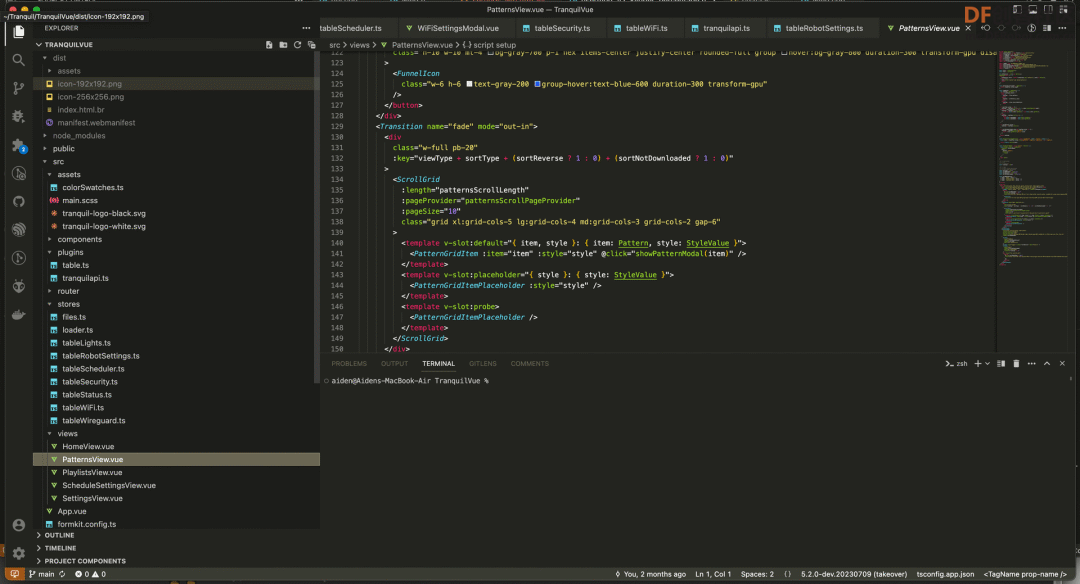 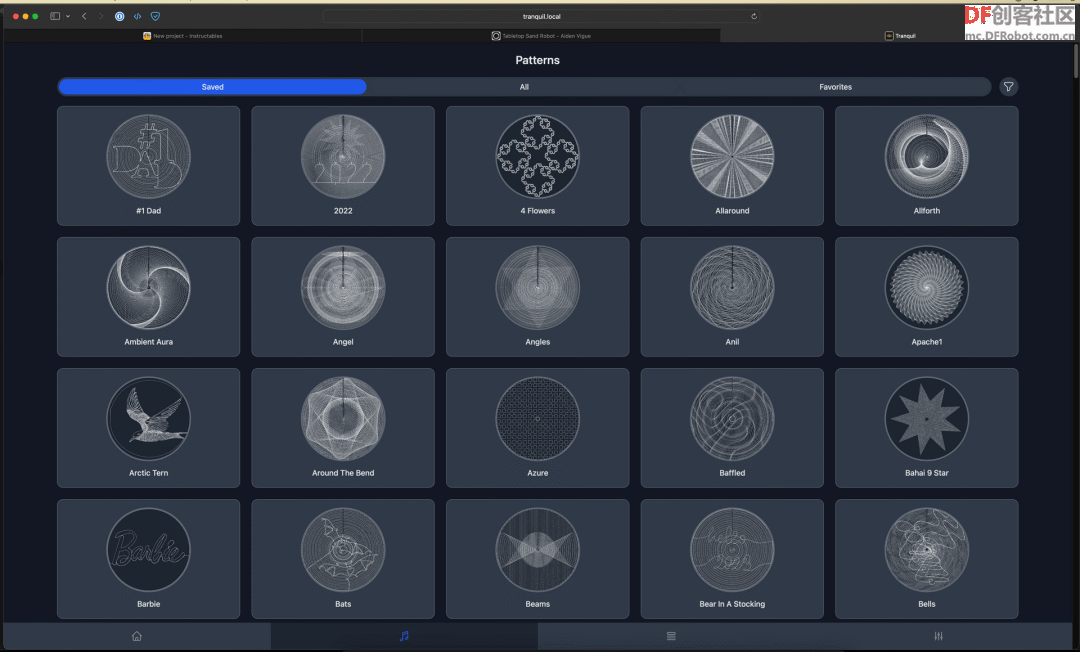 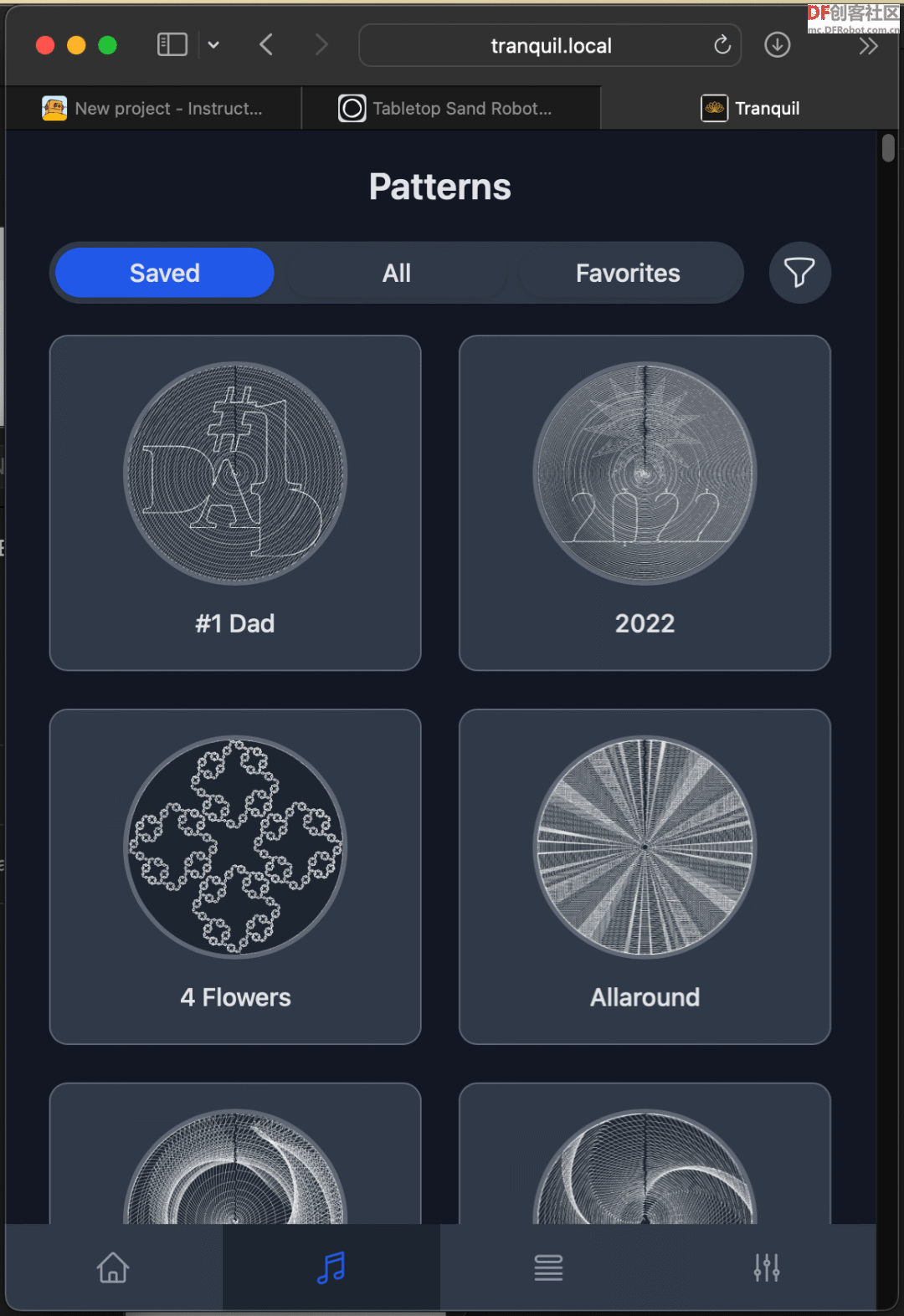 我从头开始使用TypeScript和Vue 3编写了Web界面,状态管理使用了Pinia,数据获取使用了一组Axios请求***。 GitHub仓库链接:https://github.com/acvigue/tranquilvue 只需克隆和构建这个项目即可继续进行。 你可以在Linux机器上运行以下命令构建项目(对于Windows机器,更改命令为相应的命令): 生成的构建文件保存在./dist目录中。 步骤11:编译设备固件 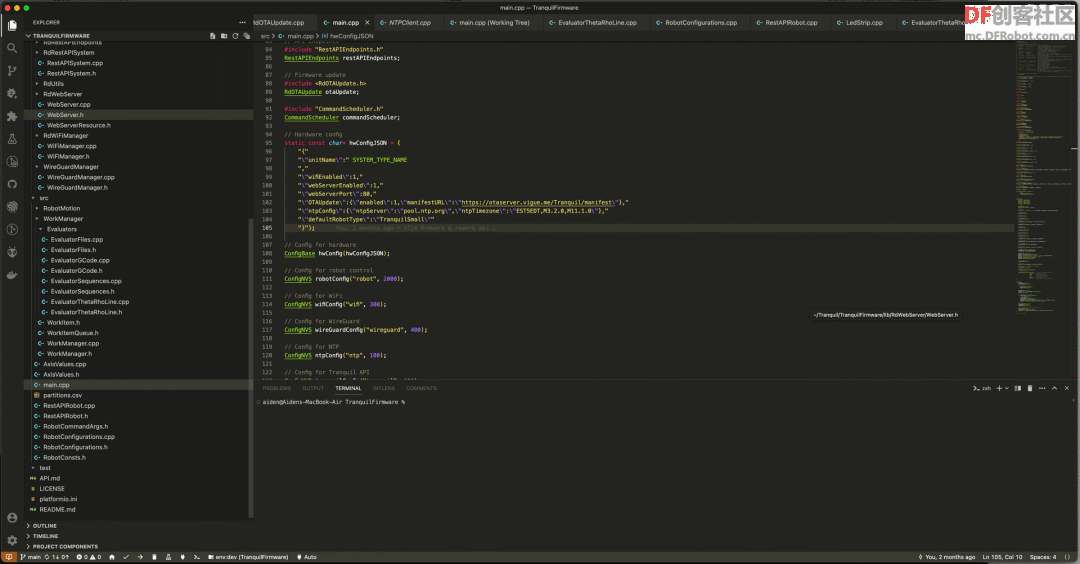 该固件几乎是从零开始重新编写的,并且已经进行了至少一年的开发。它是一个普通的PlatformIO项目,可以在这里下载:https://github.com/acvigue/tranquilfirmware 将构建的Web资源拖到此目录,PlatformIO将自动将它们移动到ESP32的SPIFFS分区。 特别提醒:本文中所示的图案不包括在内,可以从互联网上下载。Web界面仅列出设备上安装的图案。 步骤12:配置设备 固件安装后,设备将设置自己的访问点,名为"Tranquil",所有初始配置都在此完成。你可以将其连接到您的Wi-Fi,设置OTA更新。 步骤13:开始玩耍    我现在已经制作了两个沙子绘图机器人,并在设计可打印性和确保我编写的固件稳定性方面积累了很多经验!遇到任何问题,欢迎和我沟通! 作者的博客:https://vigue.me 作者的GitHub:https://github.com/acvigue 原文作者:aidenvigue 原文连接:https://www.instructables.com/ES ... Sand-Drawing-Robot/ 转载请注明来源信息 |
LL7YTT 发表于 2023-9-28 10:51 https://vigue.autodesk360.com/g/ ... 5397e371072af688736 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶





 萌萌哒新人
萌萌哒新人
 宣传大使
宣传大使
 小蘑菇
小蘑菇
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






