|
4231| 0
|
二哈识图2 +掌控板+超声波+DeepSeek——智慧护眼精灵... |

|
本帖最后由 ckkk 于 2025-10-3 02:34 编辑 根据央馆《创意智造》及白名单《全国青少年人工智能创新挑战赛开源硬件创意智造》竞赛规则,要求竞赛现场制作期间严禁以任何方式接入互联网。因此,本教程以基于局域网的SIOT平台为主要环境,利用离线AI模块及本地部署大语言模型(如DeepSeek等)来解决生活中实际问题,在创客项目中,可以帮助我们根据竞赛要求的器材,采用不必上互联网的数字技术,让单片机(Arduino、ESP8266、ESP32、microbit、掌控板、行空板K10、行空板M10等主控器)与AI大模型对话来实现多项数据集的繁杂分析,给出结果或个性化的综合报告等。 SIOT桥接AI大数据模型的工作流程:掌控板等发布请求 → SIOT(topic/a) → 电脑端接收 → AI大模型生成回答 → 电脑发布到SIOT(topic/b) →掌控板等接收响应实现功能。 本教程利用二哈识图2 +掌控板+I/O扩展板+超声波+本地DeepSeek——《智慧护眼精灵》 一、熟悉二哈识图2 1.固件更新到最新版 当前最新系统版本为1.1.5,找到系统设置 - 设备信息,可以看到当前的系统版本,建议更新到最新版本体验功能。具体操作详见:官方教程7固件更新,如下图所示。 2.人脸识别与姿态识别 HUSKYLENS 2 (二哈识图 2) 是一款简单易用、玩法多样的AI视觉传感器,采用6TOPS算力专用AI芯片,预置人脸识别、目标检测、物体分类、姿态识别、实例分割等20余种开机即用的AI模型,同时,用户还可部署自行训练的模型,教会二哈识图识别任意目标物体。板载的UART / I2C端口,可以与主流控制器Arduino、micro:bit、ESP32、行空板K10、行空板M10、RaspberryPi等开源硬件无缝连接,被广泛应用于创客、AI教育、STEAM教育和交互艺术领域。(1)人脸识别 本教程要用到二哈识图 2的人脸识别功能,检查是否有人脸存在,如果有人脸就启用超声波测距,该距离意味着是装置离人脸的距离,即用眼距离。二哈识图 2的人脸识别具体操作详见:官方教程的4.2人脸识别,如下图所示。  如果只监测人脸,不做自学习操作,如果要检测某个人的人脸,那就要学习人脸并更改参数标注是谁即可。 (2)姿态识别 本教程要用到二哈识图 2的姿态识别功能,监测学习者不正确的几种姿态,如不正确的坐姿:趴桌睡、伸懒腰、腰侧弯等等,可以先看看官方教程4.7姿态识别,再看看基于二哈识图2 AI视觉传感器(HuskyLens 2)姿态识别的《智慧护眼精灵》项目设计1,如下图所示。    由于我们检测的姿态,在Mind+程序模块中映射的是自学习姿态的名称而非ID,故手指触摸二哈识图2的屏幕,修改参数中的设置名字(分别把命名为ID1趴桌睡、ID2伸懒腰、ID3腰侧弯),手指触摸旁边的“显示名字”后,再触摸左上角返回箭头退出设置界面。如下图所示。 由于我们检测的姿态,在Mind+程序模块中映射的是自学习姿态的名称而非ID,故手指触摸二哈识图2的屏幕,修改参数中的设置名字(分别把命名为ID1趴桌睡、ID2伸懒腰、ID3腰侧弯),手指触摸旁边的“显示名字”后,再触摸左上角返回箭头退出设置界面。如下图所示。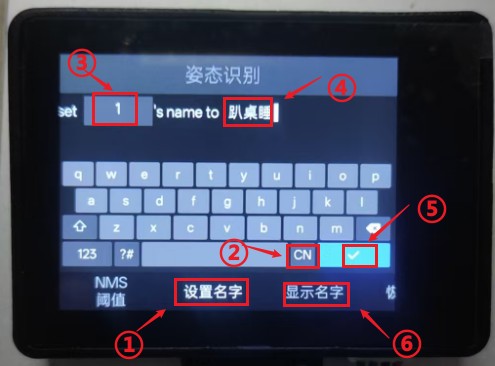 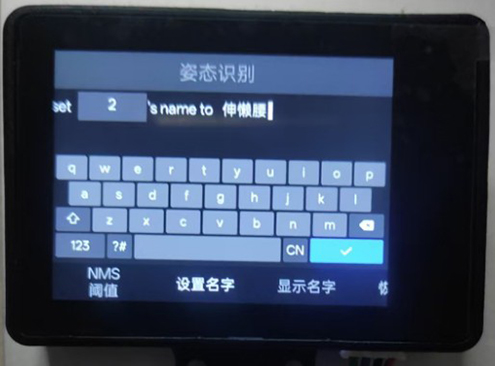 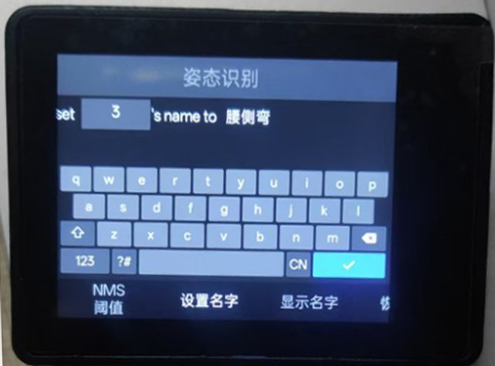 二、熟悉掌控板 掌控板由创客教育专家委员会推出, 是一款教学用开源硬件,为普及创客教育而生,反应一线Python编程教学需求,迎接普通高中新课改。 在巴掌大的板子上集成了ESP32主控芯片及各种传感器和执行器同时使用金手指的方式引出了所有IO口,性能强劲扩展性强。 是中小学老师进行编程教育的好帮手,也是创客、编程爱好者的创作工具。可以编程,不管是图形还是python编程都可以,也可以造物,还可以轻松玩转物联网或是可穿戴应用。详细介绍详见官方网站,功能概括如下图所示。 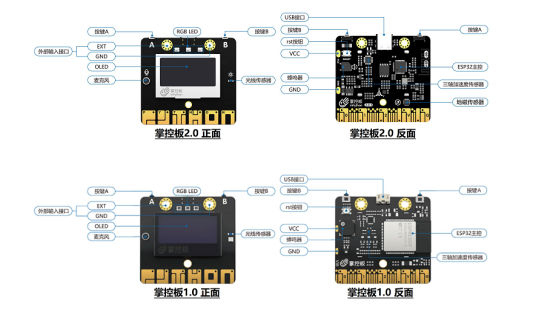
1.电路连接: 智慧护眼精灵使用开源器件有掌控板、二哈识图 2视觉传感器、超声波传感器、语音合成模块。在实物接线时,千万注意电源正负极不能接错喔,二哈识图 2的IIC一定要接到扩展板HuskyLens的专用接口上且扩展板USB接上电脑提供5V供电(电源开关打开ON)、语音识别模块若以IIC连接请把模块上的波段开关拨至IIC档位喔。 (1)实物连接如下图。 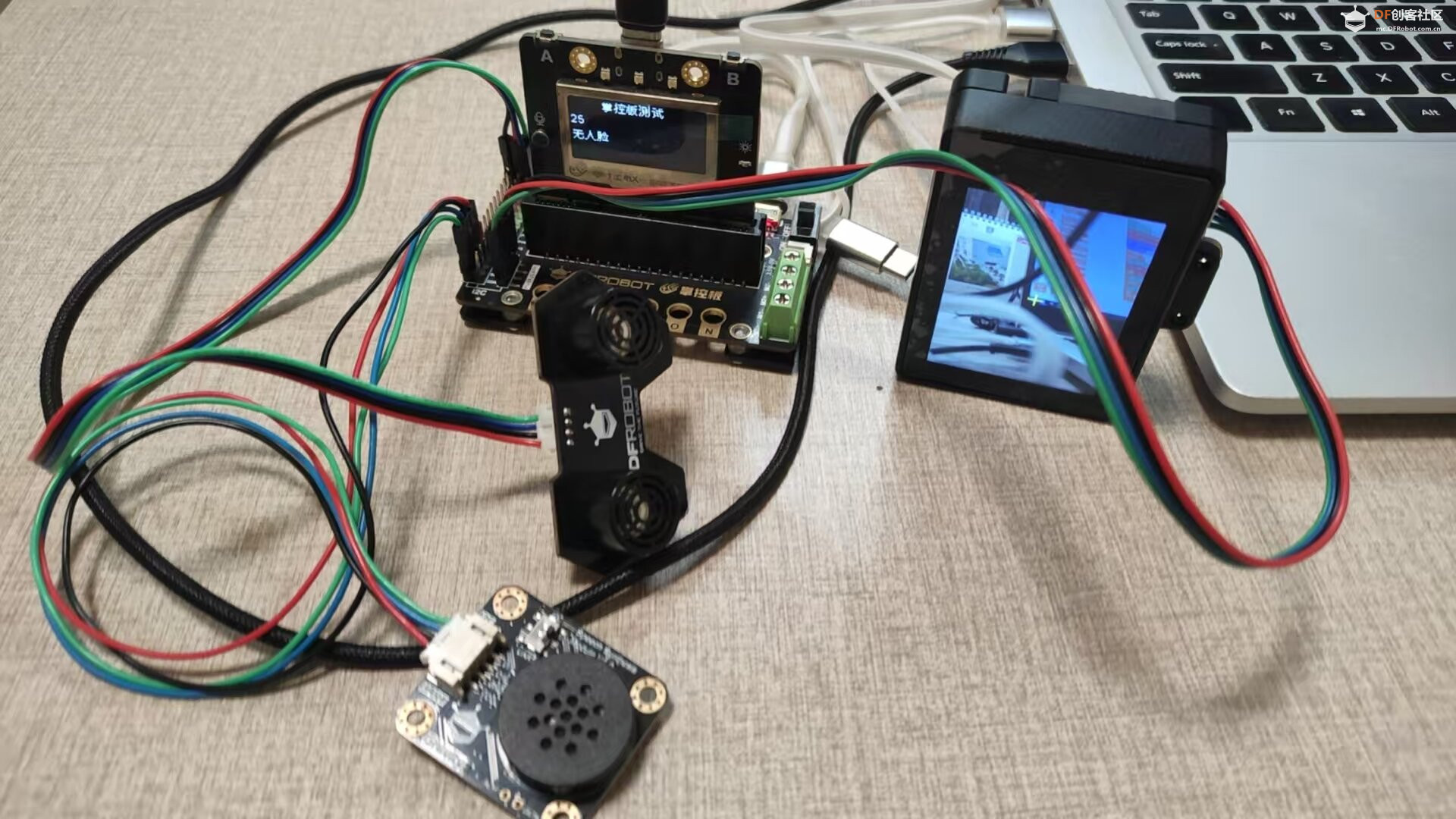 (2)电子连线图如下图。 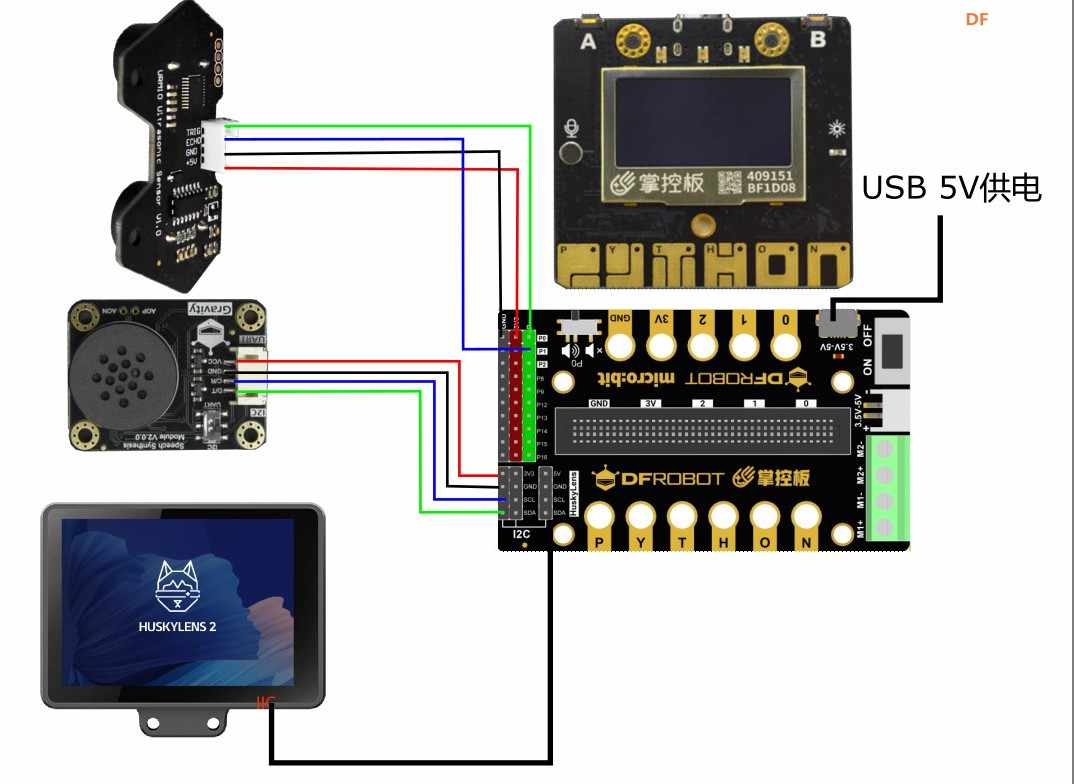 2.编程测试: 打开Mind+,分别扩展→主控板→掌控板;传感器→超声波测距传感器;执行器→语音合成模块;用户库→输入HuskyLens 2搜索→HuskyLens 2AI摄像头。如下图所示。     编程测试程序,分别测试各个模块能否正常使用。测试程序如下图所示。 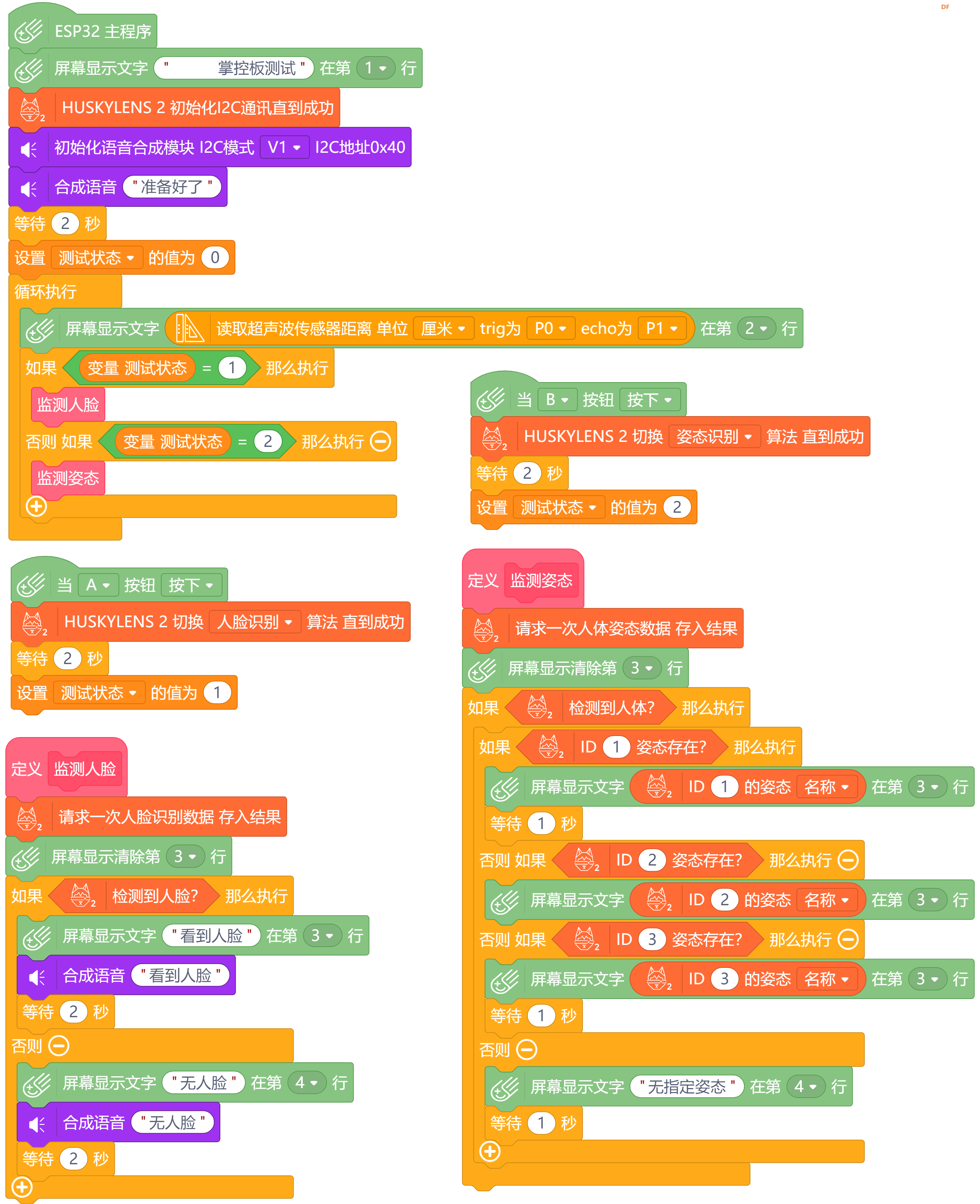 测试时,先听听有无“准备好了”的声音;接着再看看超声波是否有显示,用手挡一挡是否有变化;再用手按下掌控板A键(多按会儿,眼睛看二哈识图2是否切换到了人脸识别),用附件照片测试,看显示听声音是否正常;最后,再按下掌控板B键(多按会儿,眼睛看二哈识图2是否切换到了姿态识别),用附件照片测试,看显示是否正常。 三、DeepSeek离线版本地部署 详见《基于二哈识图2 AI视觉传感器(HuskyLens 2)姿态识别的《智慧护眼精灵》项目设计3》中的八、DeepSeek离线版本地部署 四、SIOT服务电脑部署 详见《基于二哈识图2 AI视觉传感器(HuskyLens 2)姿态识别的《智慧护眼精灵》项目设计3》中的九、SIOT服务电脑部署。 五、联调测试与迭代 《智慧护眼精灵》 (1)Mind+程序迭代1 按掌控板A键进行用眼监测,按掌控板B键进行姿态监测,将使用过程数据拼字串进入“看护数据”变量,准备发送物联网SIOT,桥接本地DeepSeek大模型的返回结果。如下图所示。  (2)掌控板完整程序 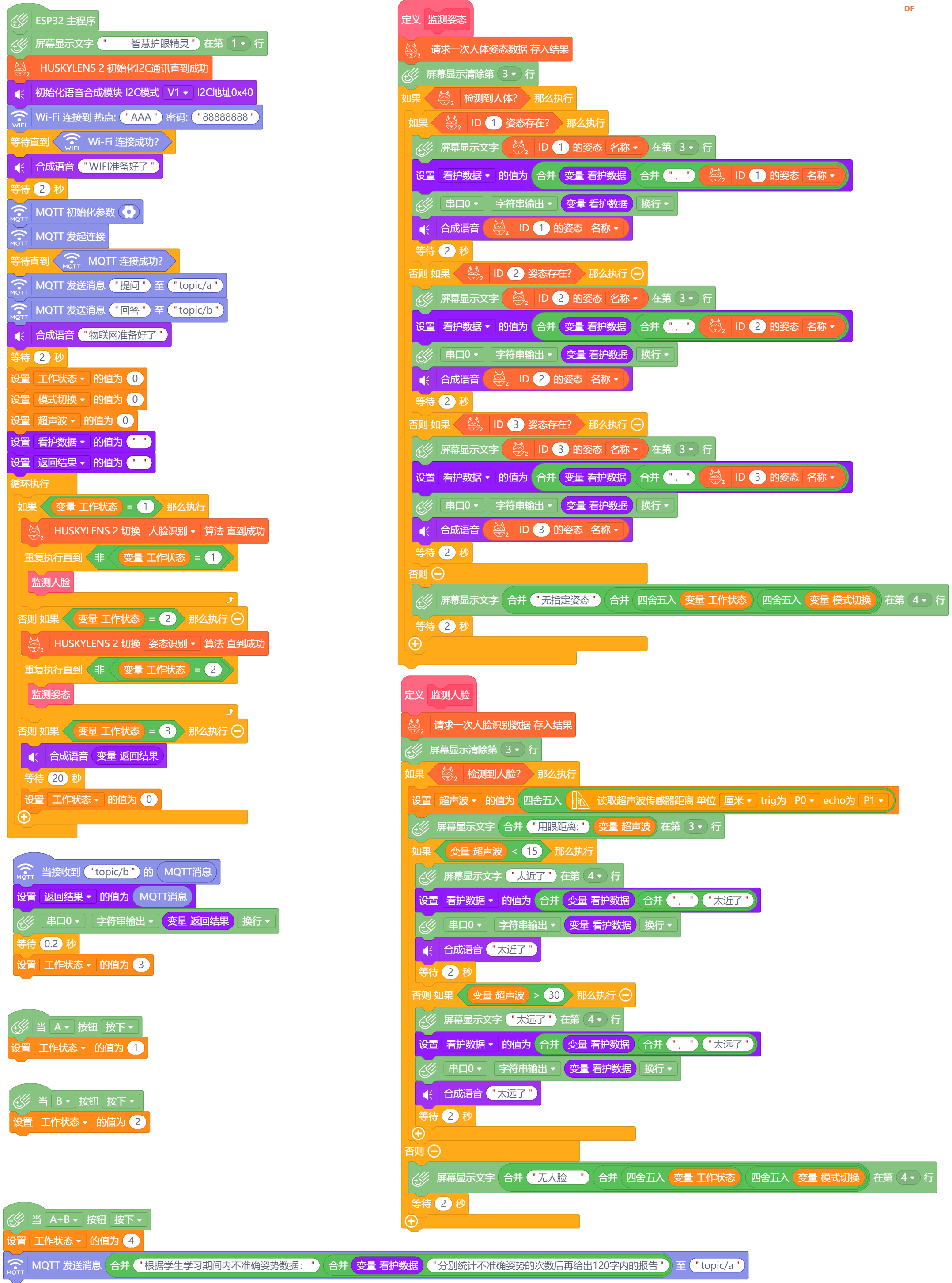 (3)与SIOT及本地DeepSeek联调 开机上电听提示语“WIFI准备好了”、“物联网准备好了”,掌控板屏幕显示正常。按下掌控板A键,用附件图片对着人脸,用手档一档超声波传感器,看屏幕显示的同时,听音“太近了”、“太远了”。再按掌控板B键切换为姿态识别模式,用附件图片对着各种姿势,看屏幕显示的同时,听音“趴桌睡”、“伸懒腰”、“腰侧弯”。操作完后,一起按下掌控板A+B键,掌控板就会将你演示的完整数据值,经过SIOT桥接给你电脑本地部署的DeepSeek大模型,得到回答再桥接给掌控板语音合成。让你听到。物联网调试提问与回答的相关界面截图,如下图所示。  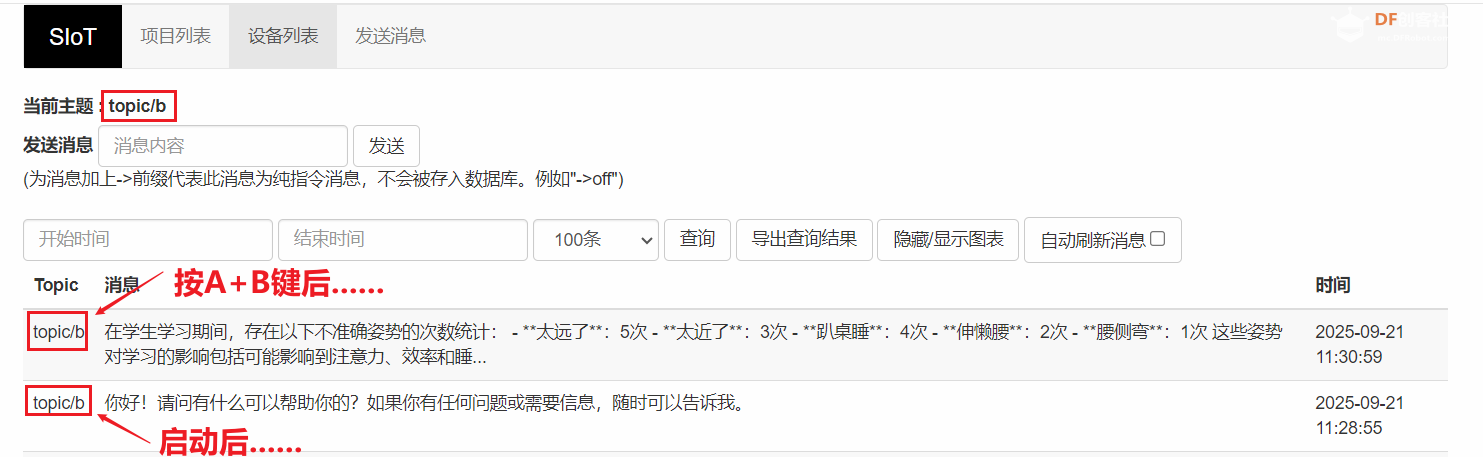 SIOT桥接服务器运行的截图,如下图所示。 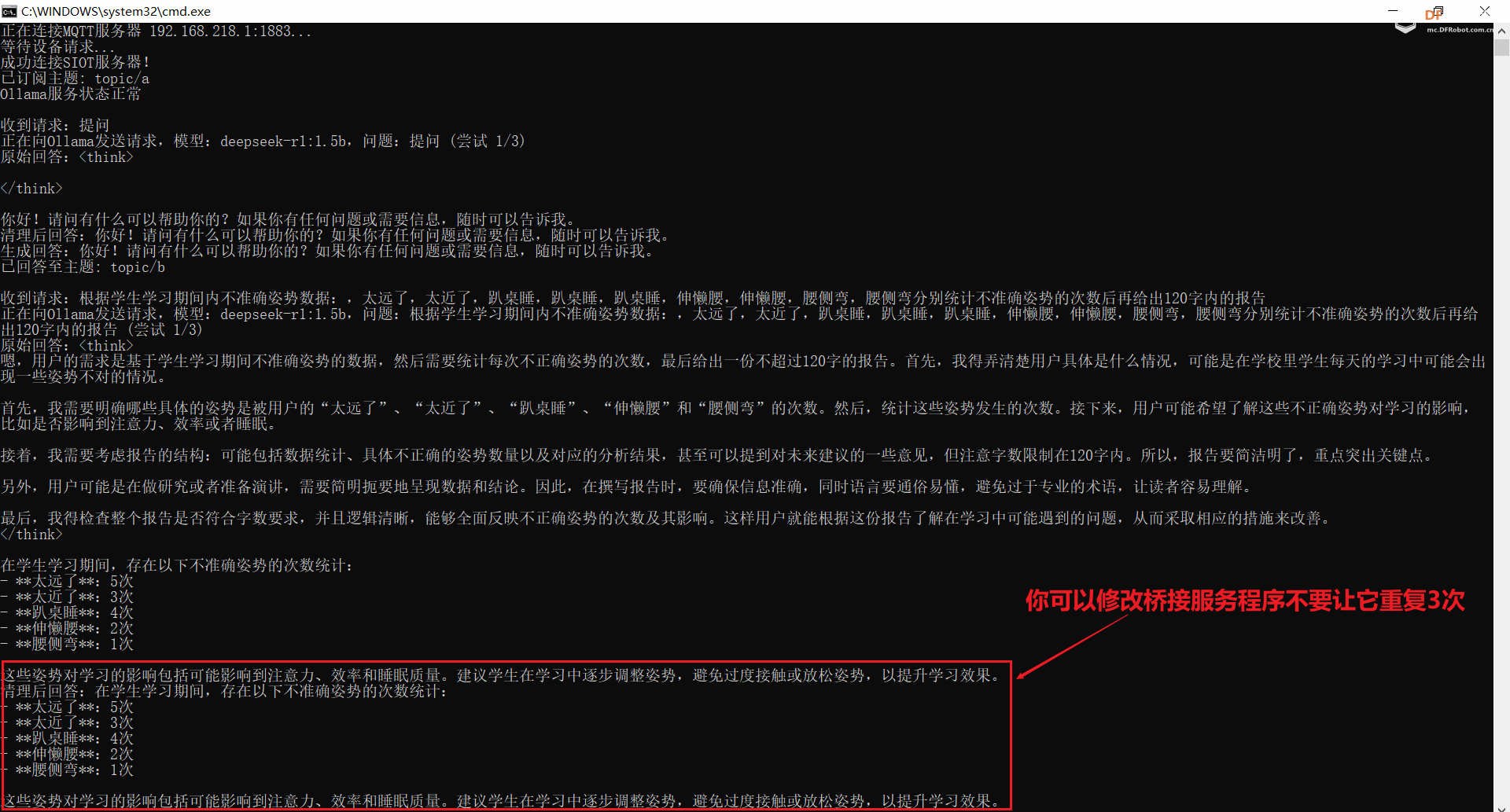 大家看DeepSeek大模型分析时序数据,统计各种状态的次数,生成含姿势稳定性、用眼节奏、学习专注力等多维度的报告,只要你提问巧妙,得到的结果十分惊艳。我们用SIOT桥接的方法,使得算力很低的主控板也能做复杂数据统计工作,而主控板编程确十分简单(只要学会物联网的使用即可)。 系列教程链接: 基于二哈识图2 AI视觉传感器(HuskyLens 2)姿态识别的《智慧护眼精灵》项目设计1 基于二哈识图2 AI视觉传感器(HuskyLens 2)姿态识别的《智慧护眼精灵》项目设计5 二哈识图2 +行空板M10+M10扩展板组合+超声波+本地DeepSeek——《智慧护眼精灵》 |

1.82 MB, 下载次数: 1280
掌控板+二哈识别2测试程序
11.25 MB, 下载次数: 1562
测试图片
1.83 MB, 下载次数: 1201
掌控板程序迭代1
1.83 MB, 下载次数: 1339
完整程序



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






