|
2033| 12
|
[K10项目分享] 在行空板K10 把 MimiClaw 玩起来~ |

|
本帖最后由 栗悟饭与龟波功 于 2026-4-7 12:20 编辑 MimiClaw是什么? Mimiclaw是芯片上的 AI 助理,没有 Linux,没有 Node.js,纯 C,可以把一块小小的 ESP32 开发板变成你的私人 AI 助理。插上 USB 供电,连上 WiFi,通过 Channel(比如飞书) 跟它对话 ,它能处理你丢给它的任何任务,还会随时间积累本地记忆不断进化 ,而这些全部跑在一颗拇指大小的芯片上 MimiClaw的源码,地址在:https://github.com/memovai/mimiclaw 我们结合K10的硬件分布对其进行了移植,把其成功部署在K10行空板上 话不多说,我们先来看看效果,然后带着大家手把手的把Mimiclaw Mimiclaw K10行空板仓库开源地址:https://github.com/DFRobot/mimiclaw 效果展示Mimiclaw可以干什么?
初始界面当我们插上USB后进行上电,会间隔5S加载下面三个界面,开机上电时会从SD卡读取数据,加载时间有点长,请耐心等待,可以查看串口日志 1.本地界面: 此界面会实时监控飞书的状态,进行显示,当飞书启动成功时,会显示连接成功,同时会启动本地的网络服务,把本机的网络ip显示出来,方便PC端进行连接 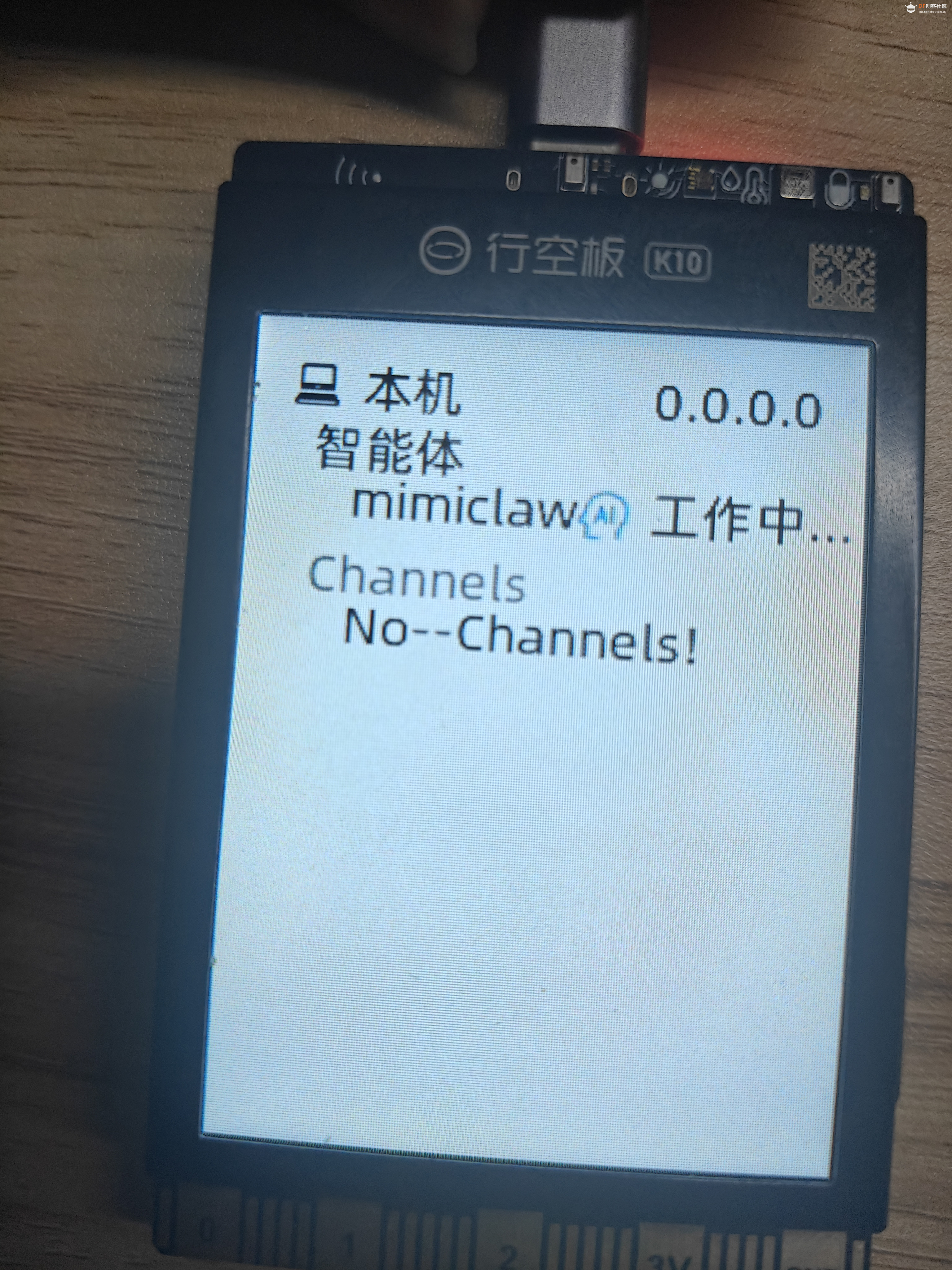 2.远程界面: 当有远方的POST请求到达时,会更新此界面,并显示出接收到的请求的远端IP 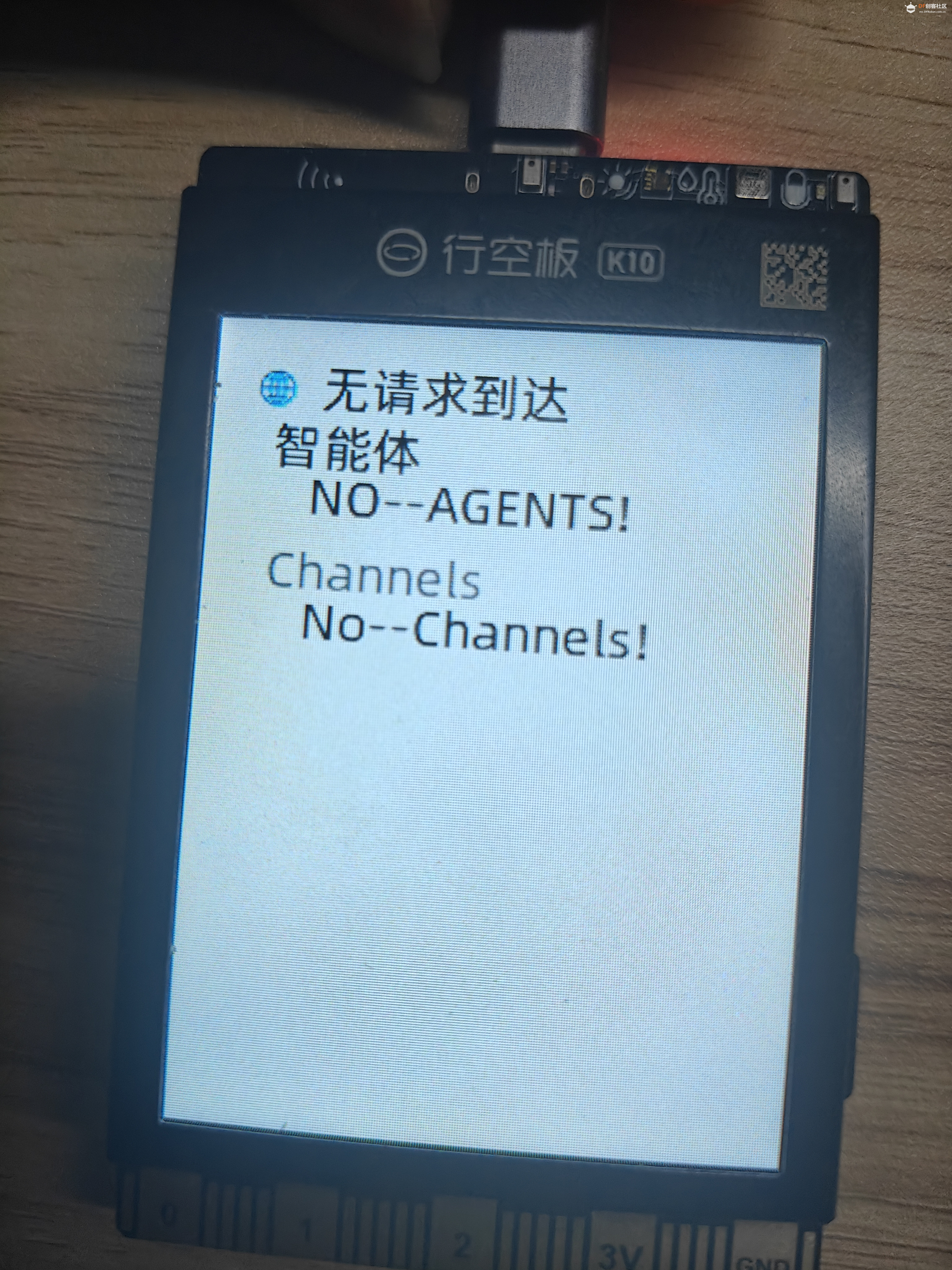 3.通知界面: 此界面会显示来自飞书的通知消息,目前默认最多显示3条 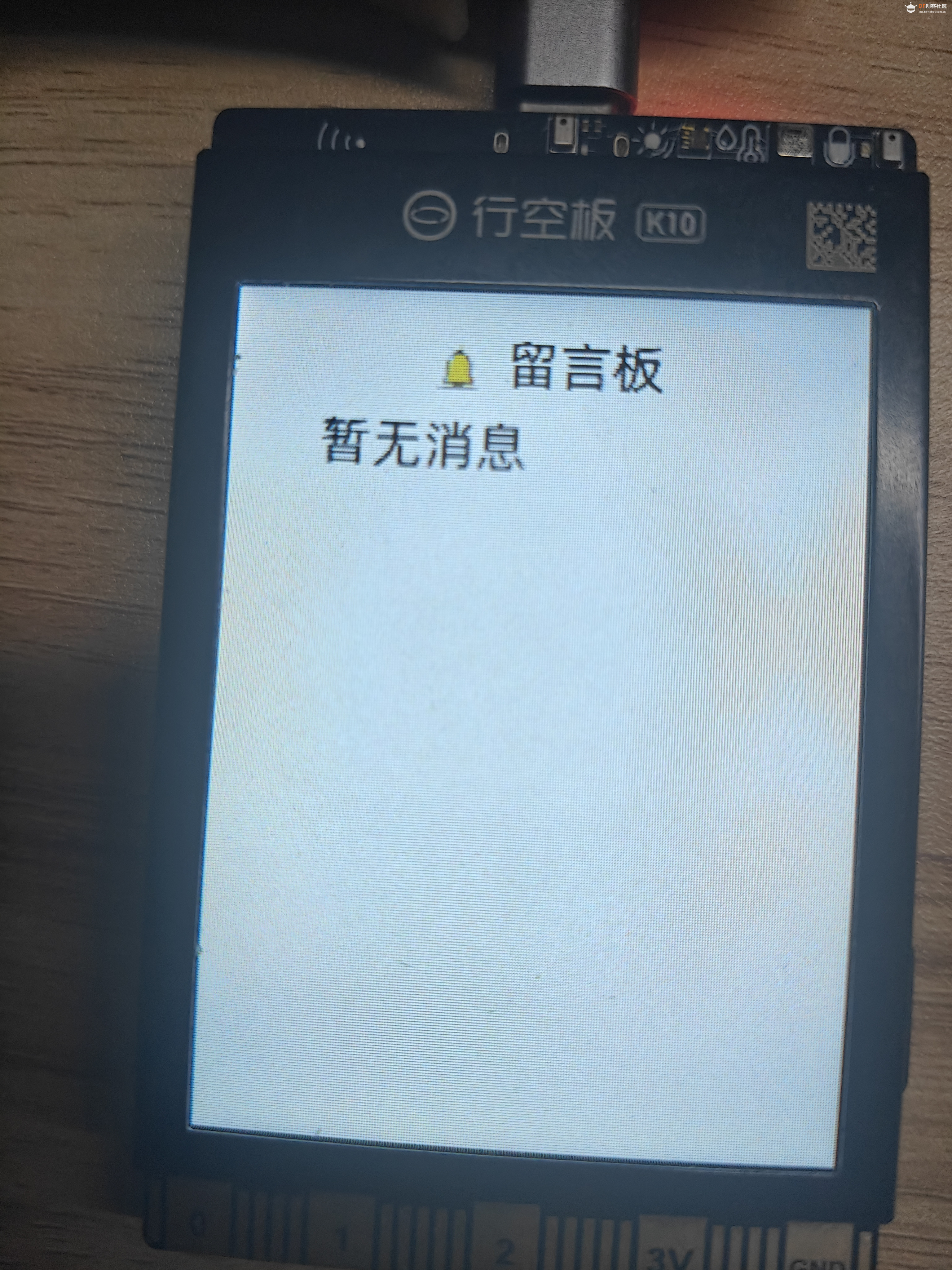 运行界面
如下,会显示当前IP,和实时监测飞书的连接状态 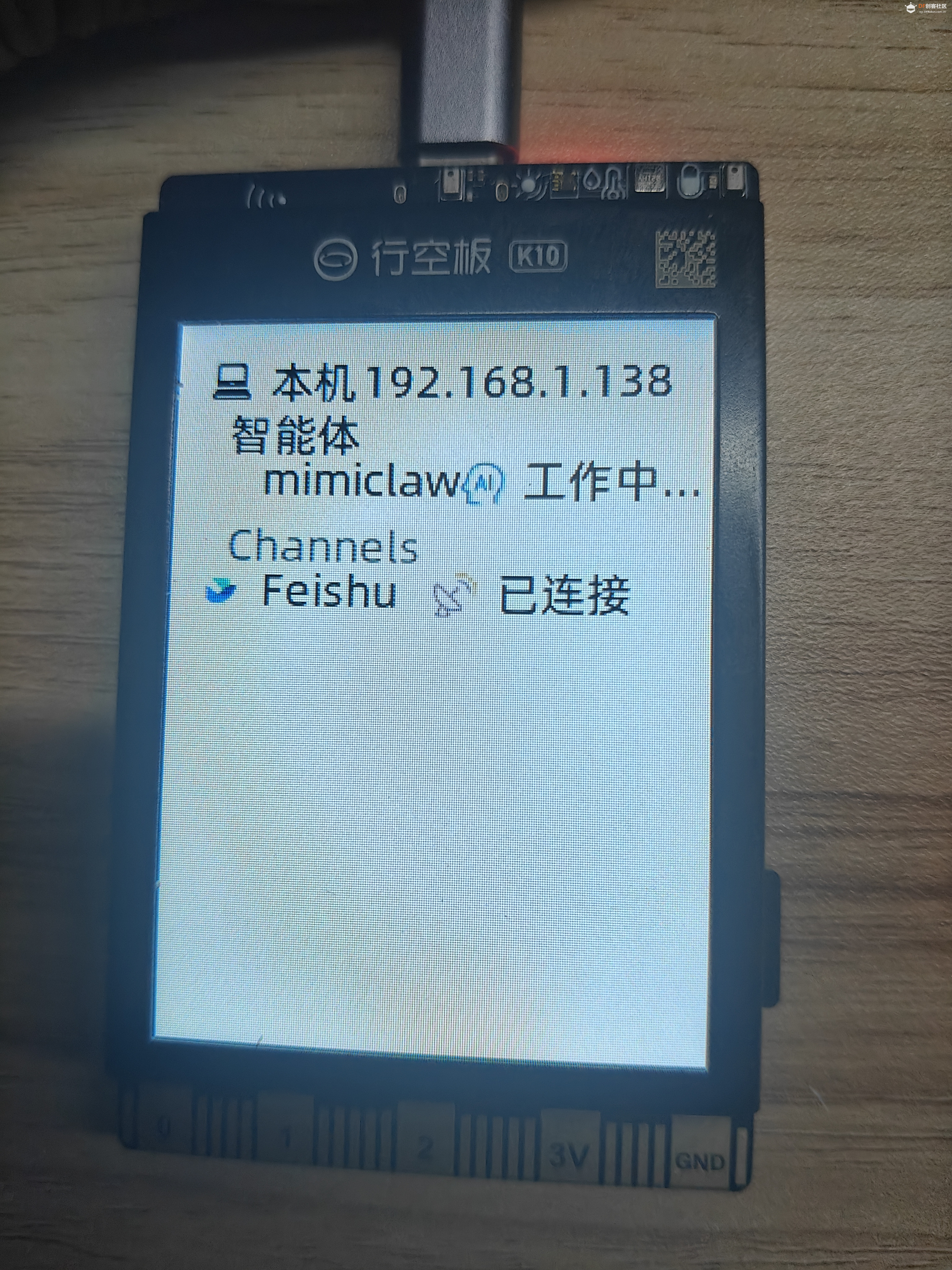 2. 智能体运行 当接收到智能体发送来的请求和消息时,会进行处理和显示,显示如下: 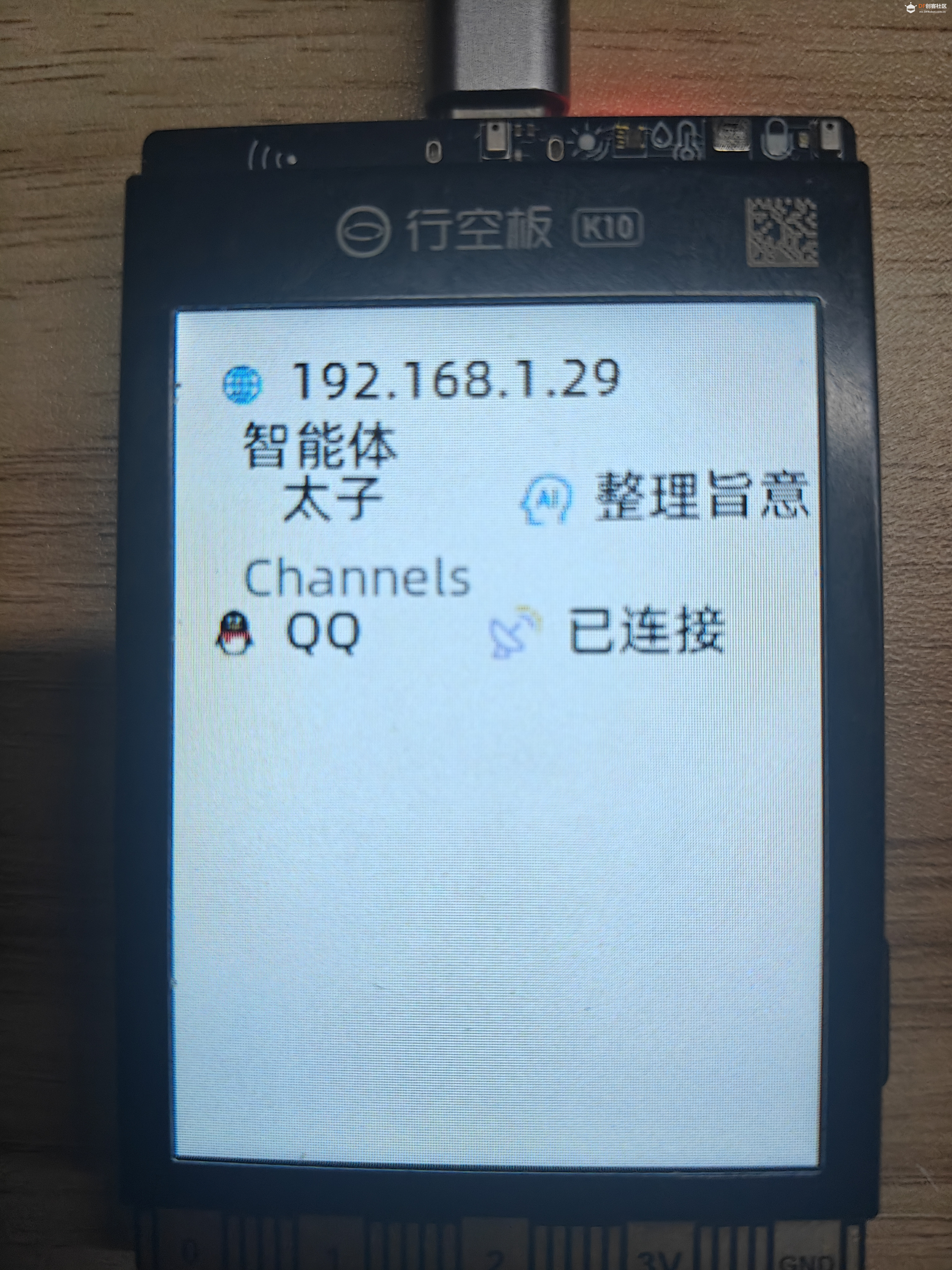 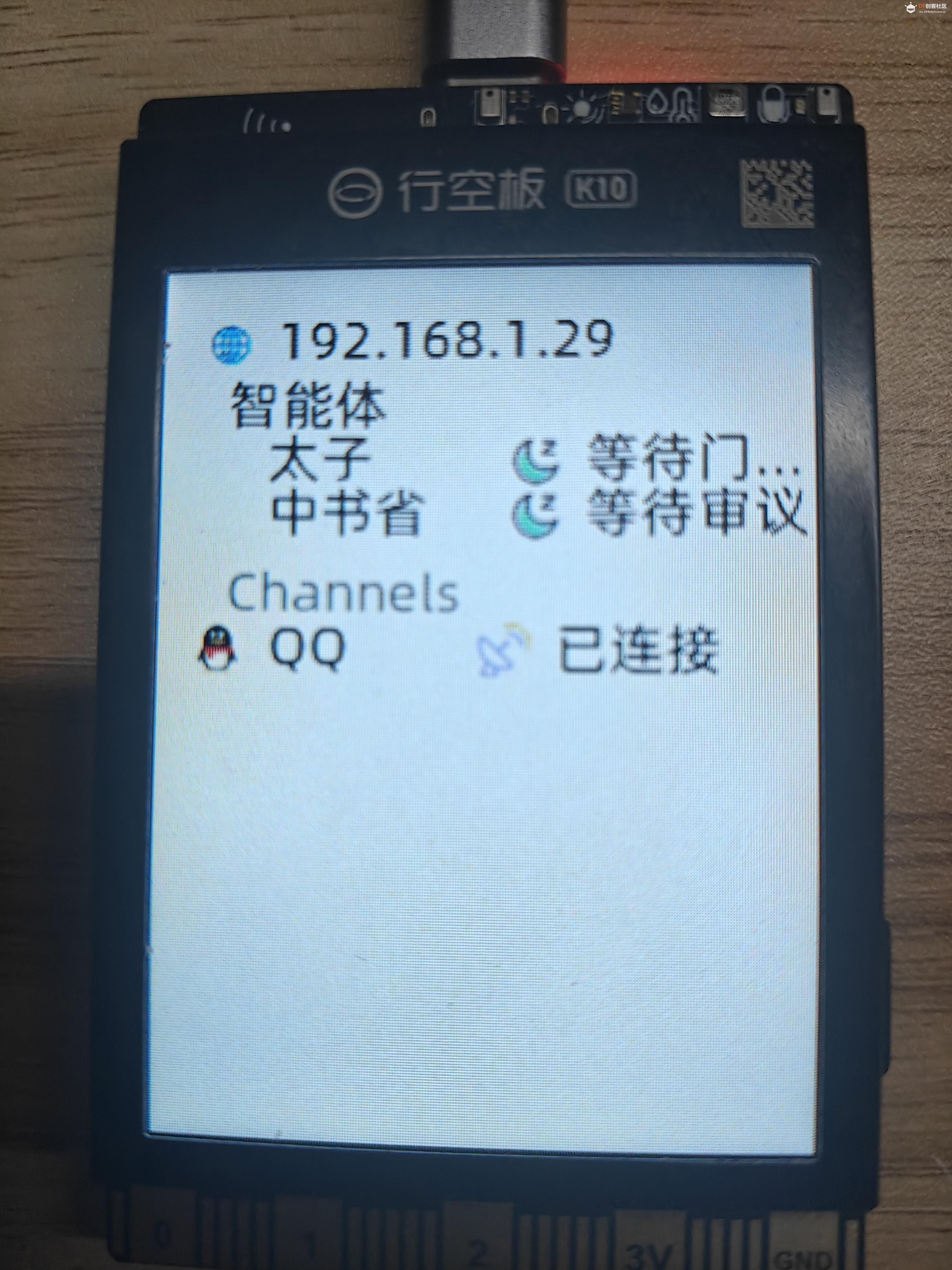 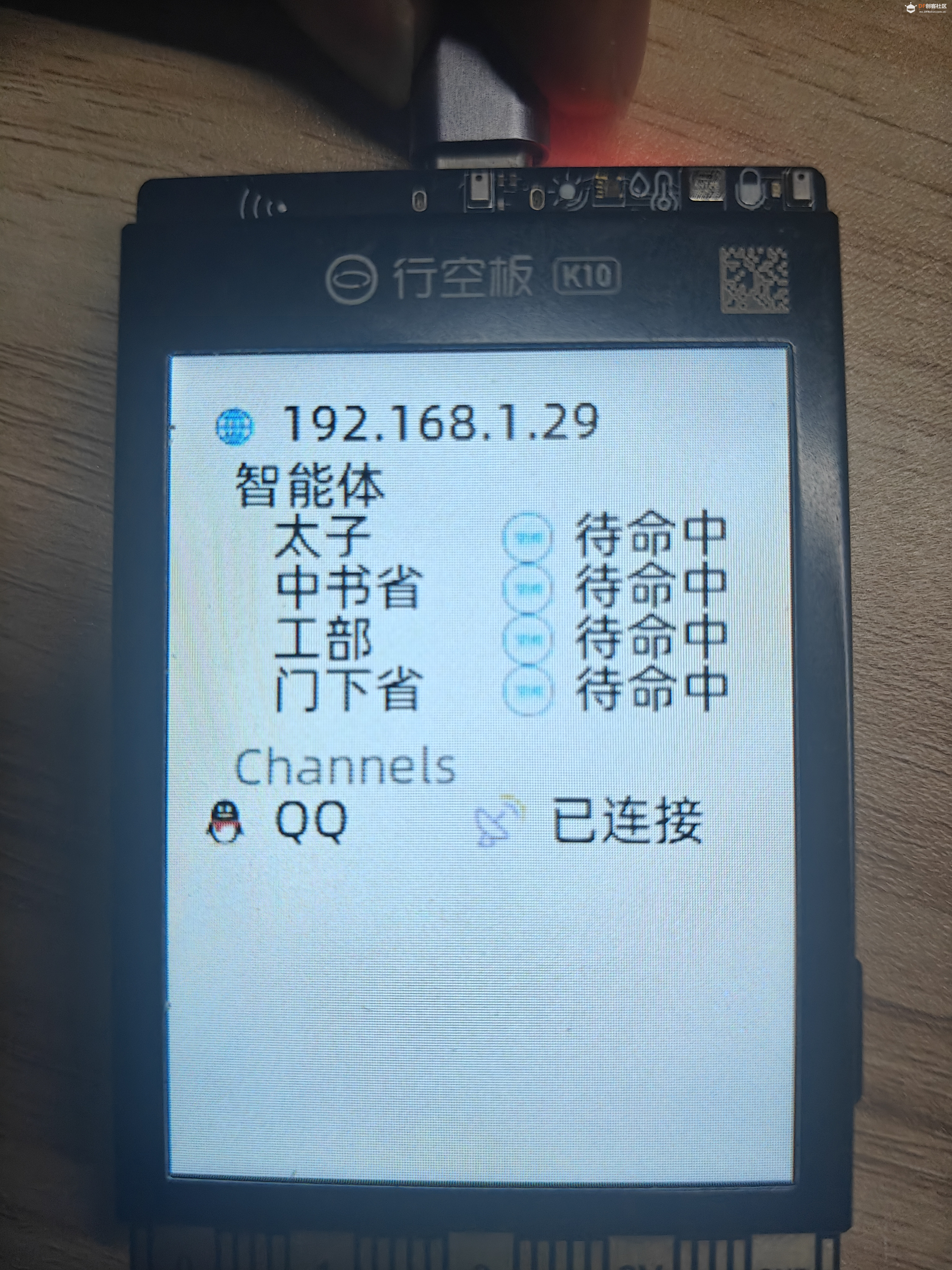 下图是我们创建的QQ机器人的电脑端的发送界面 3. 消息通知 可以通过飞书机器人进行控制,发布通知显示在屏幕上,屏幕显示和相应的飞书机器人聊天界面如下:  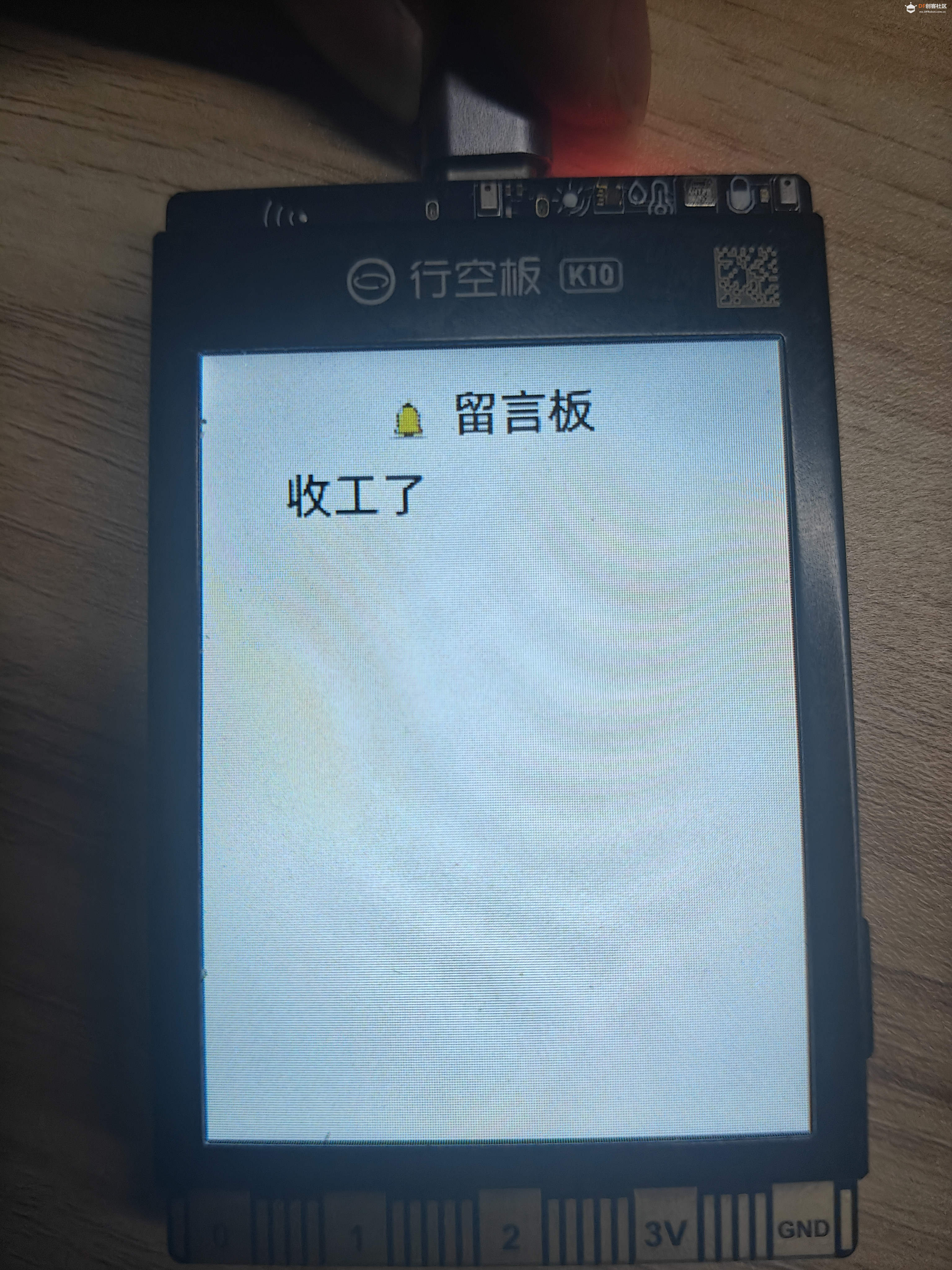 4. 飞书控制硬件(灯) 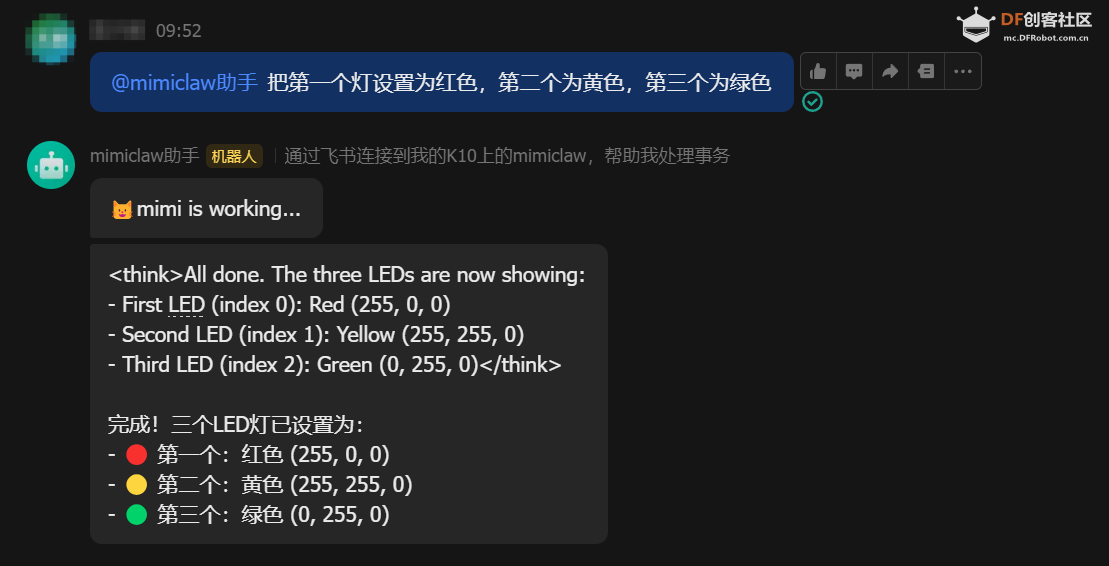  环境准备ESP32端对于ESP32端:
这个有多种下载方式,可以使用版本管理器,或者离线下载,为了保证后续你可以在代码的基础上实现自己的idea,请务必保证版本一致,来减少不必要的麻烦,下图是离线下载的例子(注意不要使用中文路径) 可以参考的链接:[ESP-IDF下载教程](教程) 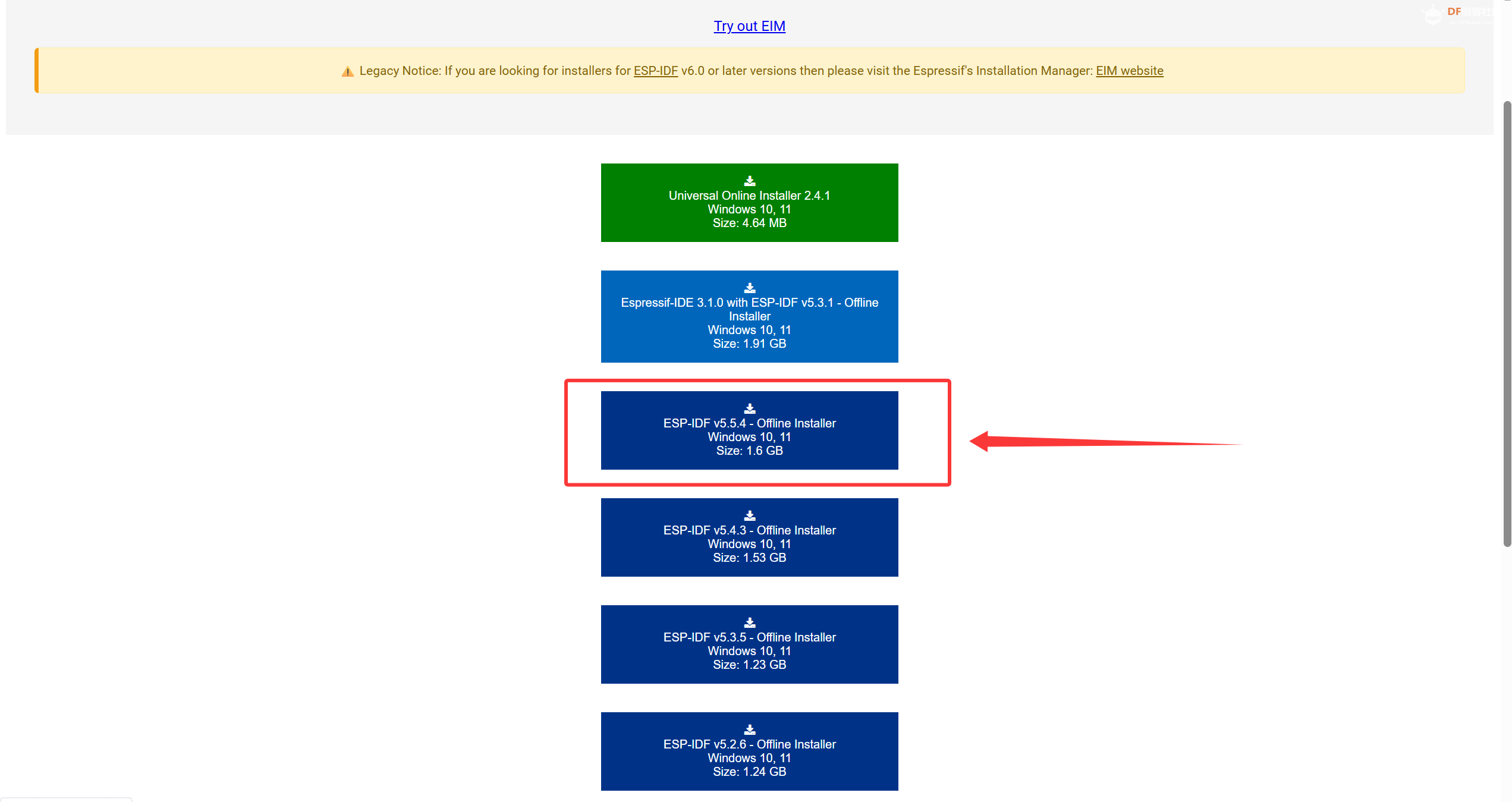
PC端
部署项目 环境准备好了,我们就一起来部署项目吧 部署到行空板K10上
创建一个项目文件,打开终端执行下面的命令
执行完成之后,会看到mimiclaw文件夹 2. 拷贝资源到SD卡 进入mimiclaw文件夹,把sdcard文件内的所有文件,全部拷贝在SD卡上,确认打开SD卡,就能看见config,img,memory,skills这四个文件夹 3. 编译运行MimiClaw 把安装好的ESP-IDF打开,进入mimiclaw的文件下,使用如下指令进行编译和下载 一般第一条指令只用执行一次,执行完全部三条命令之后,就可以看见程序下载进入我们的行空板k10啦,这能检测当前是否有错误 4. 配置文件 当我们检查完,流程跑通之后,我们可以在配置文件配置自己的WIFI,使用的模型,和相应的密钥,并且配置我们创建的飞书机器人的ID和密钥 配置文件在 main/mimi_config.h,下面是我们下载时的mimi_config.h文件需要修改的部分 模型支持两种,一个是openai,一个是anthropic,根据自己的需求需要更新下面的字段,我使用的是MiniMax,这样配置 除此之外,可能不同模型对于Token的限制不一样,这个也需要进行更改 5. 智能体助手注册/浏览器注册 飞书: 参考下面的链接进行注册,创建一个属于自己的飞书机器人并进行发布 [飞书机器人配置] 注意:飞书注册好之后,可以自己创建一个只有自己的群聊,然后点击右上角添加机器人进来,此后可以通过@机器人 来进行对话,如果想要在多人群聊中进行使用,需要注意是外部群聊还是内部群聊,需要进行设置,可以参考这个: [把飞书机器人添加到群聊] Tavily: 这个是比较好注册的,推荐使用谷歌或者是Github等第三方账号直接进行登录 [tavily注册] 部署在PC端我们需要在我们的openclaw上接入我们的QQ bot 1. 注册QQ机器人 [QQ机器人注册链接]前往此链接,根据指示创建,保存得到的AppID和AppSecret 2.把QQ机器人绑定openclaw 打开openclaw,使用下面的命令,在channel界面对QQ进行注册(新版本有的功能) openclaw config 或者使用下面的方式,使用QQ Bot插件的原生注册方式,参考下面的链接 [QQBot注册] 此时我们就能够通过手机的QQ机器人来和openclaw进行沟通了 3. 部署桌宠客户端 既然我们已经拥有了QQ机器人,那么我们就可以让他直接帮我们下载桌宠的源码,这样我们就不需要自己动手啦,毕竟使用桌宠还是为了解放双手嘛~ 让他直接按照我们源码仓库的openclaw_skills_channels下的readme.md文件进行安装,URL在下面 https://github.com/DFRobot/mimiclaw/blob/main/openclaw_skills_channels/README.md 之后我们需要设置连接的IP,此IP就是我们K10的IP哦(会显示在屏幕上),也可以通过串口日志进行查看 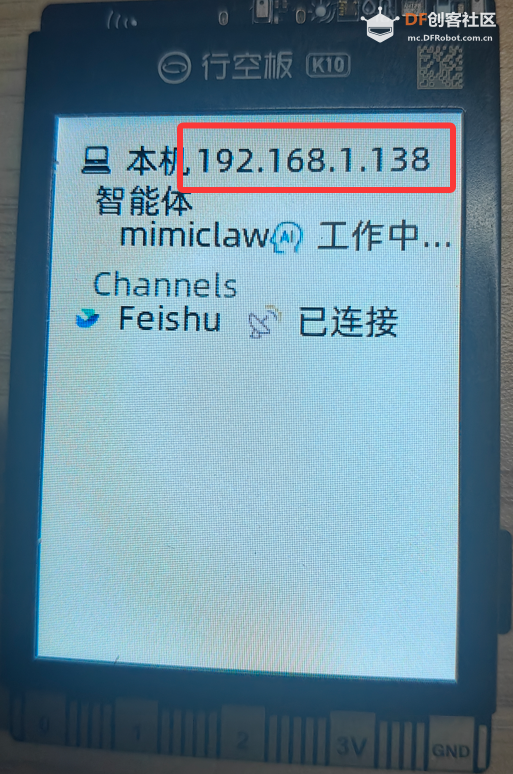 我们可以说:桌宠IP是xxxxx,来进行设置 下面我提供了一份操作的流程图,供参考: 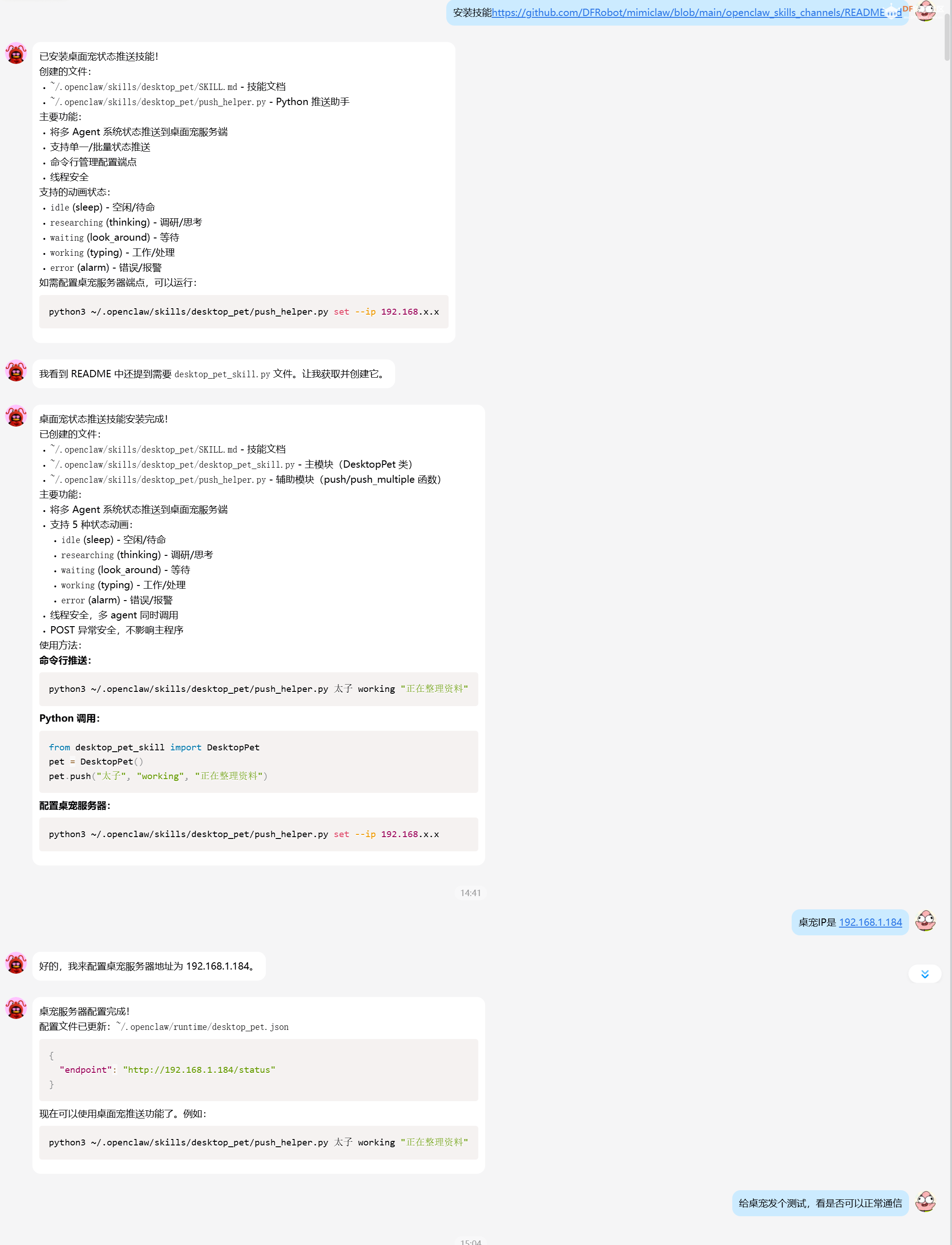 到此,我们的PC端全部配置完成,可以把MimiClaw使用起来了 感谢 本项目 DFRobot/mimiclaw 基于memovai/mimiclaw 进行移植与二次开发,首先向原仓库的作者与贡献者致以最诚挚的感谢! 感谢 memovai/mimiclaw 开创性地将 OpenClaw 带到 ESP32-S3 这样小巧、低成本的硬件上,让“口袋里的 AI 助手”成为可能。没有你们的前瞻性设计与扎实的基础工作,就不会有本项目在 行空板K10 上的落地。 我们在原项目的基础上,针对 行空板 K10 的硬件特性进行了适配与优化,希望能让更多创客、开发者、教育者和爱好者,以更低门槛体验硬件 AI 智能体的魅力。 邀请你参与 K10 版本的使用与共建 如果你正在使用或计划使用 行空板 K10 运行MimiClaw,我们非常欢迎你:
我们期待这个项目能成长为一个活跃、开放、共创的社区, 让 AI 真正跑在每一块小小的开发板上,跑在每一个创客的桌面上。 联系与参与
让我们一起,把智能体带到更小、更便宜、更自由的硬件上 |
|
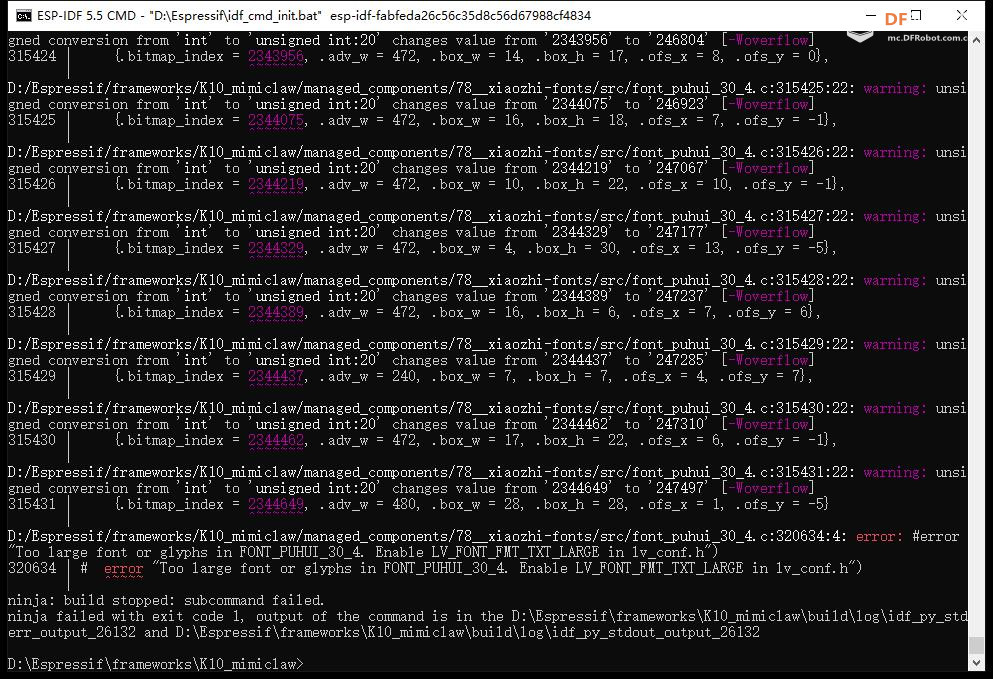
通过编译 Project build complete. To flash, run: idf.py flash or idf.py -p PORT flash or python -m esptool --chip esp32s3 -b 460800 --before default_reset --after hard_reset write_flash --flash_mode dio --flash_size 16MB --flash_freq 80m 0x0 build\bootloader\bootloader.bin 0x8000 build\partition_table\partition-table.bin 0xf000 build\ota_data_initial.bin 0x20000 build\mimiclaw.bin 0x420000 build\spiffs.bin or from the "D:\Espressif\frameworks\K10_mimiclaw\build" directory python -m esptool --chip esp32s3 -b 460800 --before default_reset --after hard_reset write_flash "@flash_args" |
驴友花雕 发表于 2026-4-12 06:40 请问是通过esp-idf的终端进行配置的lvgl吗,可以尝试 这样进入之后,选择如下菜单: Component config → LVGL configuration → Font Usage 选择Enable it if you have fonts with a lot of characters项,使用空格启用 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 七改八改,勉强点亮屏幕
七改八改,勉强点亮屏幕
 悔悟卡
悔悟卡 匿名卡
匿名卡






