|
165| 1
|
[项目] 手把手教你造一个会「玩球」的平衡机器人! |

|
本帖最后由 RRoy 于 2025-5-13 13:58 编辑 想象一下,有个机器人,不靠手不靠脚,就能让一个球稳稳地待在板子上,无论怎么晃动都掉不下去,听起来是不是挺有意思?  今天,就带大家认识一位“平衡艺术家”—— BaBot! 由 Johan Link 开发的 BaBot,不是什么遥不可及的高科技,而是一个完全开源、你可以亲手打造的球平衡机器人项目! 它能让你亲身感受: 什么是 PID 控制? 传感器怎么玩? 机器人是怎么“思考”并行动的? 无论你是学生想把理论变实践,还是老师想找个有趣的教学案例,或者只是个纯粹热爱折腾的极客,BaBot 都能让你玩到停不下来!  BaBot 的诞生也挺有意思,它从 2018 年一个高中项目起步,最初用电脑加摄像头追球,后来迭代到树莓派版本。但现在这个最新版,用了更精巧的红外传感器和 ATmega32U4 微控制器,体积更小巧,成本更亲民,而且搭建起来也更方便。 准备工作 硬件部分
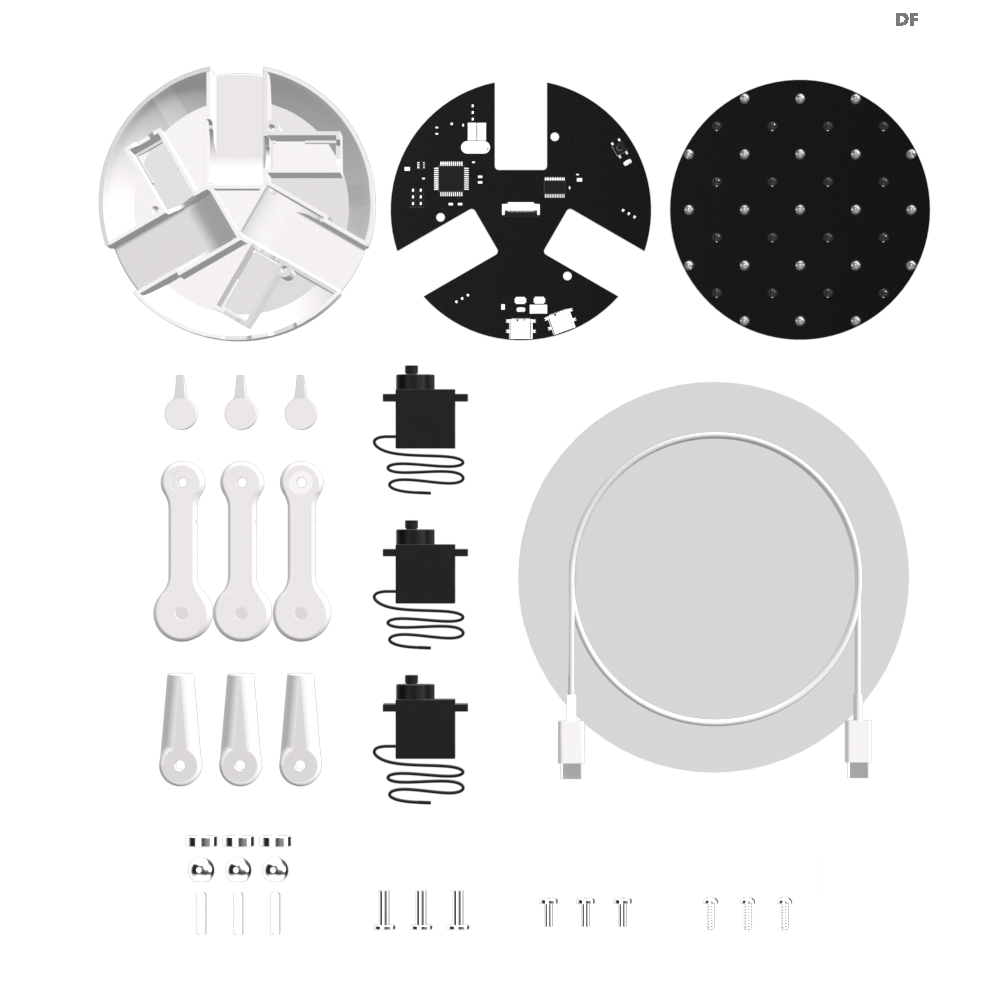 工具部分
软件部分
第一步:搞定最核心的“骨骼”—— PCB 板 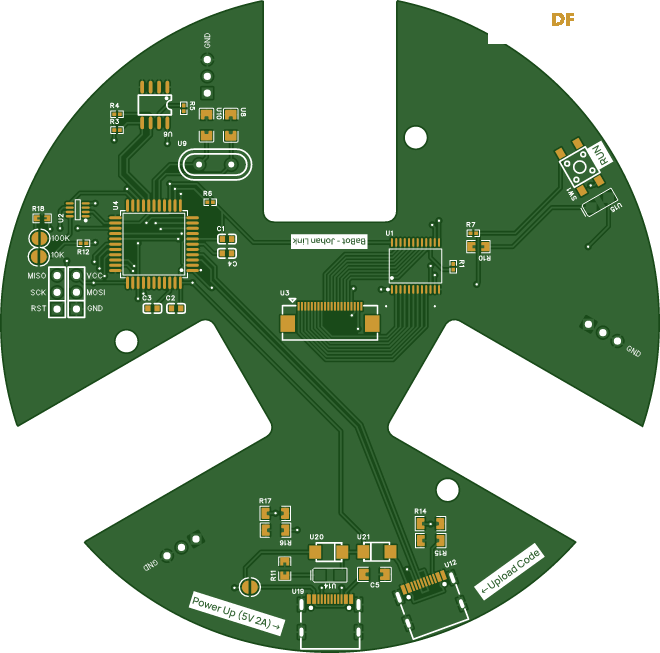 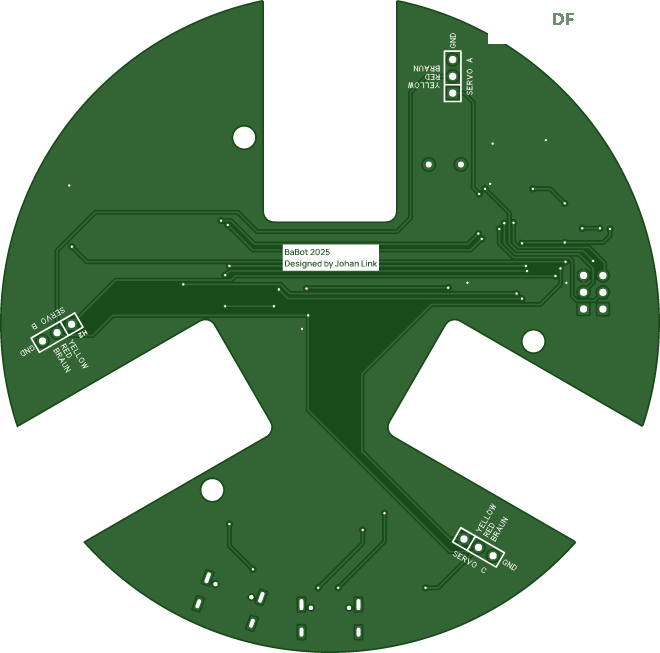 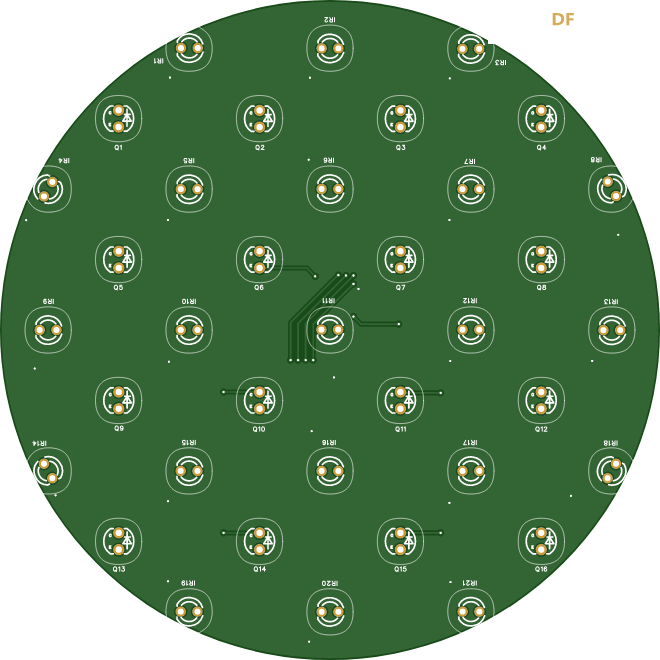 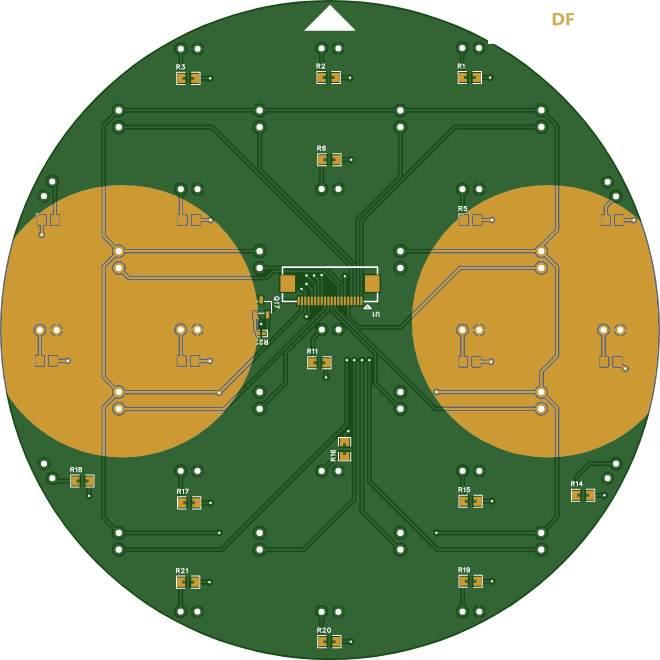 可以在这边下载打样:https://www.pcbway.com/project/s ... Robot_7efa0601.html 实物展示:  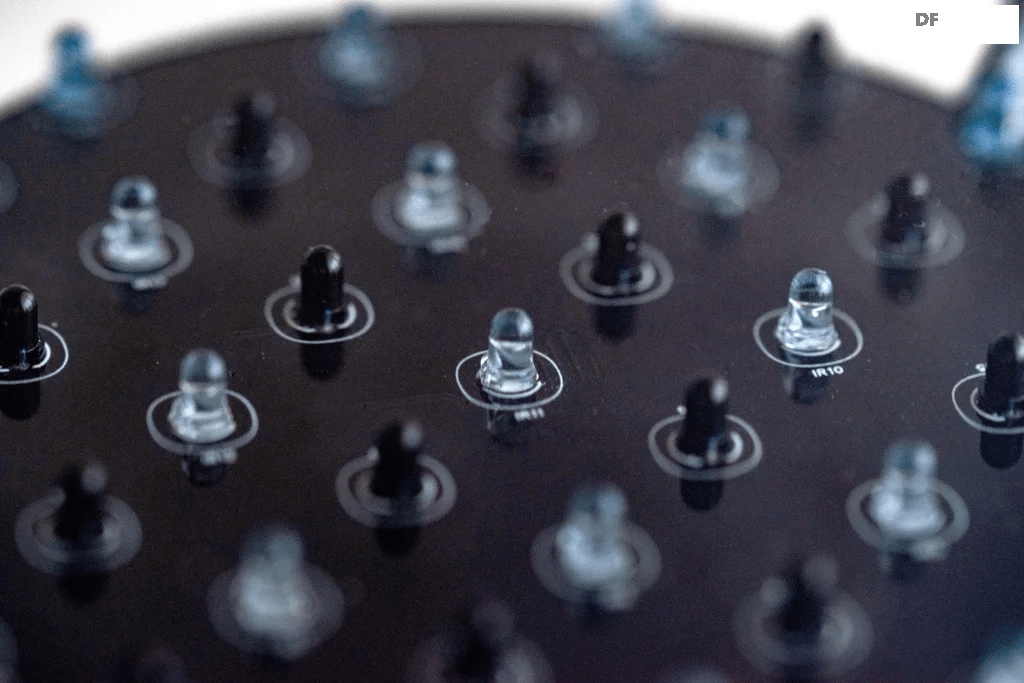 第二步:打印出机器人的“肌肉”—— 3D 打印结构件 BaBot 的身体框架、机械臂什么的,都是靠 3D 打印机打印出来的。 注意,那些要和舵机亲密接触的零件,打印精度得高一点。 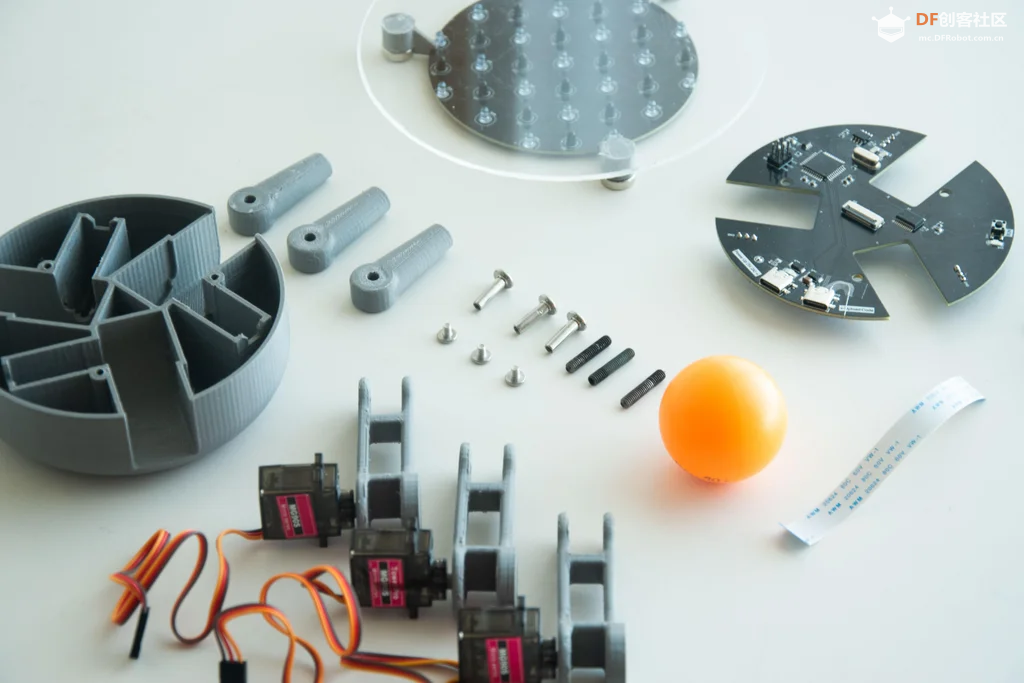 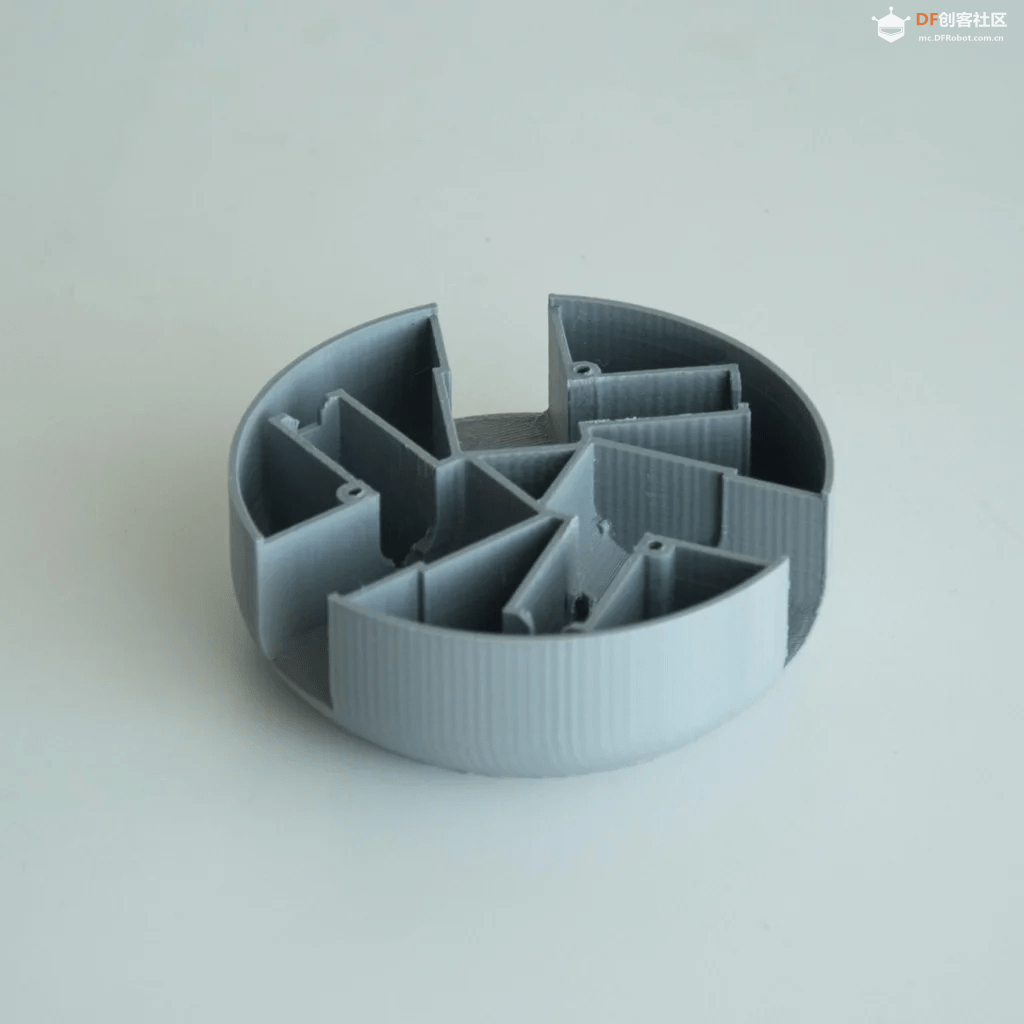 STL文件可以直接到Thingiverse上下载:https://www.thingiverse.com/thing:7021268/files 或者点击文末左下角阅读原文,到DF创客社区论坛下载。 第三步:组装“手臂”和“关节” 3D 打印件到手后,先把那三根机械臂装好,然后把它们连到 MG90S 舵机上。   第四步:搭起机器人的“基座” 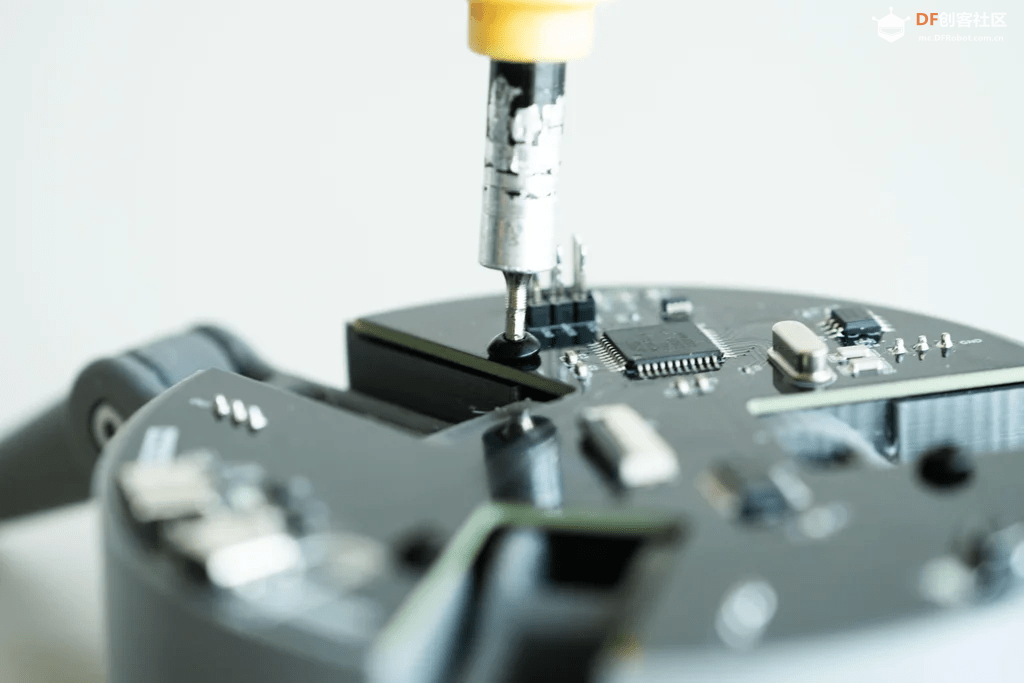 接着,把刚才装好的舵机臂安装到底座上。这就是 BaBot 的地基,所有电子器件都要放上面,平衡的魔法也从这里开始!  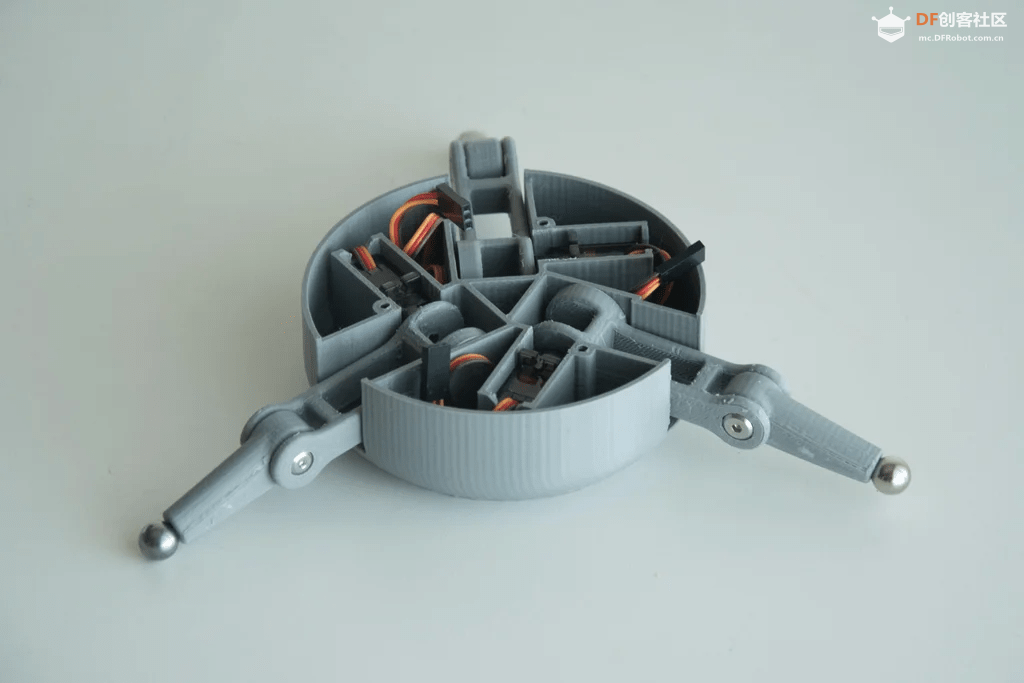 第五步:给机器人盖上“帽子”—— 安装顶板 现在,把那块亚克力透明顶板装到第二块 PCB 上,球就是在这上面滚来滚去的。   第六步:给机器人“注入灵魂”—— 上传代码  使用 Arduino IDE,把下载好的固件代码上传到主板上的 ATmega32U4 微控制器里。 代码是开源的,在 GitHub 上可以下载:https://github.com/JohanLink/BABOT 代码里有详细注释帮你理解。https://www.ba-bot.com/ 上也有更详尽的解析。 BaBot 到底是怎么做到“球不落地”的?  当你在透明板上放上球,一连串神奇的事情就发生了:
这就是 BaBot 实时球平衡的秘密,传感器、控制算法、精密机械完美配合。 最后 BaBot 不仅仅是个好玩的玩具,它提供了一个很好的机会,让你亲手搭建并深入理解实时控制系统。开源的设计鼓励你去修改、去实验,无论你是刚入门的小白还是想挑战自己的高手,相信都可以在 BaBot 中找到乐趣。 原项目地址:https://www.instructables.com/Ba ... ll-Balancing-Robot/ 项目作者:Johan Link 译文首发于DF创客社区 转载请注明来源信息 |

4.45 MB, 下载次数: 6



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2025 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 萌萌哒新人
萌萌哒新人
 宣传大使
宣传大使
 小蘑菇
小蘑菇
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






