|
16| 8
|
[项目] 【花雕】ESP32-S3 AI 智能助手(MimiClaw)主程序:综合分析 |
|
MimiClaw 是一款源自国外的创新嵌入式开源项目,致力于在低成本微控制器上实现完整的 AI 智能体能力,官方定义为 “全球首个运行在微控制器上的 AI Agent”。 该项目核心亮点在于摆脱了传统 AI 应用对 Linux、Node.js 等操作系统或运行时的依赖,以 99.2% 纯 C 语言实现裸机编程,仅需一块成本约 5 美元的 ESP32-S3 开发板(需 16MB Flash + 8MB PSRAM)即可运行。其设计聚焦 “本地自主智能”,无需依赖云端服务器,仅 0.5W 超低功耗支持 24/7 不间断运行,所有数据存储于本地 Flash,兼具隐私安全与断网可用特性。 功能上,MimiClaw 具备完整的 AI 助理能力:支持 Telegram、WebSocket 等多渠道交互,兼容 Anthropic(Claude)与 OpenAI(GPT)双模型提供商且运行时可切换;内置 ReAct 模式工具调用(如网页搜索、定时任务)、本地持久化记忆系统(可通过 SOUL.md 自定义人设、MEMORY.md 存储长期记忆),还支持 GPIO 硬件控制、OTA 远程升级、串口 CLI 配置等嵌入式核心功能,可灵活适配机器人控制、智能家居、边缘计算等多场景需求。 官方文档:https://mimiclaw.io 代码仓库: Gitee:https://gitee.com/tinytaro/mimiclaw、https://gitee.com/RexHuang936/mimiclaw GitHub:https://github.com/memovai/mimiclaw、https://github.com/Miaojianyu/miniclaw 项目采用 MIT 开源许可证,支持 Ubuntu、macOS 等多系统编译部署,适配国内用户的代理配置需求,具备低门槛、高扩展性的特点,是嵌入式 AI 开发与 DIY 爱好者的优质实践方案。  |
下载的开源源代码压缩包,名称为“mimiclaw-main”,总大小为466K。 解压缩后打开,找到了纯C语言的 MimiClaw 主程序 mimi.c,其大小只有6K,好奇数了一下,总共169行。  MimiClaw 主程序 mimi.c 源代码如下 中文注释后有300行 |
|
ESP32-S3 AI 智能助手(MimiClaw)主程序:综合分析 + 深度解读 + 总体功能 ## 一、总体定位 MimiClaw(嵌入式迷你小龙虾)的完整正式版主程序,专门适配 ESP32-S3 微控制器开发板,是一套高度集成、可独立运行的边缘端 AI 智能体系统。相较于简化版,该正式版主程序最大的核心特色的是深度融合硬件交互能力,打破了“AI 助手仅能通过软件交互”的局限,将 AI 智能与硬件控制无缝衔接,构建出兼具实用性与扩展性的嵌入式智能系统。 它绝非简单的 AI 聊天工具,而是一个具备独立交互、自主决策能力的微型智能机器人主控系统,全方位覆盖“AI 智能+硬件交互+网络服务+本地存储”的全场景需求,具体实现以下核心功能: 1、AI 核心能力:依托本地部署的 AI 架构,实现完整的本地 AI 思考、智能决策与任务执行,无需依赖云端主机,真正实现边缘端自主智能,契合 MimiClaw“本地优先、自主可控”的核心设计理念; 2、硬件交互能力:集成屏幕显示、RGB 灯效反馈、实体按键控制三大基础交互模块,搭配 IMU 陀螺仪/加速度计,支持“摇一摇”唤醒配置界面,让系统状态可视化、操作便捷化,具备极强的硬件实操性; 3、网络服务能力:内置 WiFi 配网功能,支持自动扫描热点、连接网络,同时提供稳定的网络服务支撑,为后续多渠道远程交互奠定基础; 4、多通道交互能力:兼容串口 CLI、WebSocket 网页端、Telegram 客户端三种远程交互方式,结合本地硬件交互,形成“本地+远程”的多维度交互体系,适配不同使用场景需求; 5、可扩展核心能力:内置完善的技能加载系统、工具调用框架与本地记忆存储系统,支持动态扩展技能、灵活调用硬件工具,同时实现会话上下文与长期记忆的持久化存储,让 AI 智能体具备“持续学习、记忆留存”的能力。 从系统架构层面来看,该主程序承担着整个 MimiClaw 系统的“总控大脑”与“生命周期管理者”双重核心角色——一方面统筹调度所有硬件模块、AI 子系统与网络服务,确保各模块协同高效运行;另一方面全程管理系统从启动、初始化、运行到异常处理的全生命周期,保障系统在 ESP32-S3 资源受限环境下,实现低功耗、高稳定、可扩展的长期运行,是 MimiClaw 从“开源项目”向“可产品化智能硬件”落地的核心载体。 |
|
## 二、主程序结构与功能总览 MimiClaw 完整正式版主程序采用模块化分层设计,各模块相互独立、协同工作,既保障了系统的稳定性与可维护性,又为后续功能扩展预留了充足空间。其结构清晰、功能完备,涵盖基础运行、硬件交互、AI 核心、网络通信及系统服务五大核心模块,各模块具体功能与实现细节如下,重点突出完整版新增的硬件交互特色,全面呈现主程序的完整功能体系。包含的全部模块(完整版): 1、基础系统 基础系统是主程序运行的核心支撑,负责保障 ESP32-S3 微控制器的稳定运行,管理系统核心资源,为所有上层模块提供基础运行环境,是整个 MimiClaw 系统的“根基”,具体包含: - NVS 闪存:作为非易失性存储模块,专门用于持久化存储 WiFi 账号密码、API 密钥、系统配置参数等关键信息,即使系统重启,存储的信息也不会丢失,确保系统下次启动时可快速恢复配置,无需重复设置; - SPIFFS 文件系统:嵌入式专用文件系统,主要用于存储 MimiClaw 的长期记忆文件、技能脚本、用户配置文件等,支持文件的读写、修改与删除,为 AI 记忆功能、技能扩展提供稳定的存储支撑,同时具备挂载失败自动格式化的容错能力; - FreeRTOS 多任务调度:依托 ESP32-S3 的双核优势,实现多任务的并行调度与管理,将 AI 思考、硬件交互、网络通信等不同功能拆分为独立任务,合理分配 CPU 资源,确保各模块高效、有序运行,避免任务阻塞导致系统卡顿; - 内存监控(内部 RAM + PSRAM):实时监测 ESP32-S3 内部 RAM 与外部 PSRAM 的空闲容量,在系统启动时打印内存信息,便于开发调试与资源优化,避免因内存不足导致的程序崩溃,保障系统在资源受限环境下的稳定运行。 2、硬件交互(新增!完整版特色) 硬件交互模块是完整版主程序与简化版的核心区别,也是 MimiClaw 实现“独立智能硬件”定位的关键,通过集成多种硬件外设与驱动,实现系统与用户、环境的物理交互,让 AI 智能体“看得见、摸得着、可操作”,具体包含: - 屏幕显示(display_init()):通过 display_init() 函数完成屏幕初始化,负责显示系统状态、AI 回复内容、WiFi 连接信息、配置界面等,让用户直观了解系统运行情况,实现信息可视化; - RGB 彩灯(rgb_init()):通过 rgb_init() 函数初始化 RGB 灯效模块,可根据系统状态输出不同颜色的灯光反馈(如开机红灯、正常运行绿灯、异常报警黄灯),实现系统状态的可视化提示,提升用户交互体验; - 按键驱动(button_Init()):通过 button_Init() 函数初始化实体按键,支持用户通过按键操作实现系统控制,如切换配置界面、确认操作、重启系统等,提供便捷的本地物理交互方式; - 配置 UI 界面(config_screen_init()):通过 config_screen_init() 函数初始化系统配置界面,集成 WiFi 配置、参数设置、技能管理等功能,用户可通过屏幕与按键直观操作,简化系统配置流程; - IMU 陀螺仪/加速度计:集成 IMU 传感器,实时采集设备的姿态、加速度数据,实现设备的姿态感知,为后续机器人控制、动作识别提供硬件支撑; - 摇一摇唤醒 UI(imu_manager_set_shake_callback):通过 imu_manager_set_shake_callback 函数注册摇一摇唤醒回调函数,用户只需摇晃设备,即可触发配置界面唤醒,无需手动操作按键,进一步提升交互便捷性。 3、AI 智能体核心 AI 智能体核心是 MimiClaw 的“大脑”,负责实现 AI 思考、决策、记忆与工具调用,是整个系统的核心竞争力,所有 AI 相关的逻辑均在此模块实现,具体包含: - 消息总线:作为所有模块的通信枢纽,负责各模块之间的消息传递与数据交互,实现 AI 核心、硬件交互、网络通信等模块的解耦,确保各模块协同工作,避免模块间直接调用导致的耦合度过高; - 记忆存储:负责存储 AI 智能体的长期记忆,包括用户交互历史、自定义人设、技能使用记录等,通过持久化存储确保记忆不丢失,让 AI 能够记住用户习惯,实现个性化交互; - 会话管理:负责管理用户与 AI 之间的上下文对话,记录当前会话的交互内容,确保 AI 能够结合上下文进行思考与回复,提升对话的连贯性与智能化程度; - 技能加载器:负责动态加载系统技能文件,支持用户新增、修改、删除技能,无需重构主程序即可扩展系统功能,实现“即插即用”的技能扩展能力; - 工具注册表:负责注册与管理各类硬件控制、数据采集工具(如 GPIO 控制、传感器读取等),AI 可根据用户需求自主调用相关工具,实现对硬件的精准控制与数据采集; - LLM 大模型代理:负责对接云端大模型(如 Claude、OpenAI),实现大模型推理请求的转发与结果接收,同时预留本地大模型部署接口,为后续实现完全离线 AI 提供支撑; - Agent Loop(AI 主循环):AI 智能体的核心执行逻辑,负责接收用户指令、调用记忆与工具、与大模型交互、生成决策结果,实现“指令接收-思考决策-任务执行-结果反馈”的全链路闭环。 4、网络与通信 网络与通信模块负责实现 MimiClaw 与外部设备的远程交互,支持多种通信方式,构建“本地+远程”的多维度交互体系,满足不同场景下的使用需求,具体包含: - WiFi 管理:负责 WiFi 模块的初始化、热点扫描、连接与断开,支持自动连接已配置的 WiFi,连接失败时提示用户检查配置,同时为网络通信模块提供稳定的网络连接; - HTTP 代理:负责处理 HTTP 请求与响应,为 AI 核心调用云端大模型、获取网络资源提供代理支撑,解决网络访问限制问题,确保云端交互的顺畅性; - Telegram 机器人:负责对接 Telegram 平台,实现用户通过 Telegram APP 远程与 MimiClaw 交互,发送指令、接收 AI 回复,支持远程控制与状态查询; - WebSocket 服务器:负责启动 WebSocket 服务,支持用户通过网页端与 MimiClaw 实时交互,实现 AI 回复、系统状态的实时展示与远程操作; - 串口 CLI 命令行:负责初始化串口通信,支持用户通过串口连接设备,输入命令行指令控制系统、查看日志、调试程序,无需网络即可实现本地调试与操作。 5、系统服务 系统服务模块负责保障 MimiClaw 系统的长期稳定运行,提供定时任务、状态监测、消息分发等基础服务,是系统可靠性的重要保障,具体包含: - 定时任务 cron:负责执行预设的定时任务,如定期清理内存、备份记忆文件、检查系统状态等,无需用户手动操作,实现系统的自动化管理; - 心跳服务:负责监测系统各模块的运行状态,定期发送心跳信号,若检测到模块异常,及时打印日志提示,便于开发人员排查问题,保障系统稳定运行; - 出站消息分发任务:负责从消息总线的出站队列中读取消息,根据消息的目标渠道(如 Telegram、WebSocket、系统内部),将 AI 回复、系统提示等消息精准分发到对应模块,确保消息传递的准确性与及时性,是多通道交互的核心支撑。 |
|
## 四、核心亮点深度解读 MimiClaw 完整正式版主程序之所以能在嵌入式 AI 领域具备鲜明竞争力,核心在于其贴合边缘智能硬件场景的架构设计与功能创新,既突破了传统 AI 助手的应用局限,又解决了嵌入式系统“资源有限、稳定性要求高、交互场景复杂”的核心痛点,以下从六大核心亮点展开深度解读,结合前文模块与启动流程,清晰呈现其技术优势与实用价值。 1、真正的“独立智能硬件”架构,具备产品化落地能力 MimiClaw 完整版与纯软件 AI 助手的核心区别的在于,它构建了一套“硬件+软件+AI”深度融合的独立智能架构,摆脱了对电脑、云端主机的依赖,具备完整的自主运行能力,是可直接推进产品化的微型机器人主控架构,具体优势体现在: - 屏幕显示状态:通过 display_init() 初始化的屏幕模块,可实时展示系统运行状态、AI 交互回复、WiFi 连接信息及配置界面,让用户无需依赖外部设备,即可直观掌握系统动态,实现信息可视化; - RGB 灯光反馈:RGB 彩灯模块(rgb_init())可根据系统不同运行阶段输出差异化灯光提示,如开机初始化时亮红灯、WiFi 连接成功亮绿灯、系统异常亮黄灯,通过视觉反馈简化用户对系统状态的判断; - 实体按键操作:button_Init() 初始化的实体按键,为用户提供便捷的本地物理控制方式,可实现配置界面切换、操作确认、系统重启等核心功能,无需依赖网络或串口调试; - 摇一摇交互:依托 IMU 陀螺仪/加速度计,通过 imu_manager_set_shake_callback 注册的摇一摇唤醒功能,用户只需摇晃设备即可触发配置界面,进一步简化操作流程,提升交互的便捷性与趣味性; - 完全独立运行:设备上电后无需连接电脑或依赖云端支撑,即可完成所有初始化流程,实现 AI 思考、硬件交互、本地管控等核心功能,真正实现“即上电、即运行”,为产品化落地奠定了坚实基础。 2、边缘 AI 架构,真正实现 AI 能力下沉到 MCU 本地 MimiClaw 最核心的技术突破之一,是将原本只能在云端、PC 端运行的 AI 智能体能力,完整下沉到 ESP32-S3 微控制器(单片机)本地,打破了“AI 必须依赖高性能设备”的固有认知,所有 AI 核心逻辑均在本地运行,不依赖任何云端主机,具体体现在: - 本地记忆存储:通过 memory_store 模块将用户交互历史、自定义人设、技能使用记录等长期记忆,存储在本地 SPIFFS 文件系统中,无需上传云端,既保障了数据隐私安全,又实现了断网状态下的记忆留存; - 本地会话管理:session_mgr 模块在本地管理用户与 AI 的上下文对话,确保 AI 能够结合历史交互内容进行思考与回复,无需依赖云端算力支撑,提升对话连贯性的同时,降低网络依赖; - 本地技能加载:skill_loader 模块可在本地动态加载技能脚本,新增、修改、删除技能无需重构主程序,也无需云端同步,实现技能扩展的本地化与便捷化; - 本地工具调用:tool_registry 模块注册的各类硬件控制、数据采集工具,可由 AI 智能体在本地自主调用,实现对 GPIO 外设、传感器的精准控制,无需云端指令转发,降低响应延迟; - 本地推理调度:Agent Loop(AI 主循环)在本地完成“指令接收-思考决策-任务执行-结果反馈”的全链路闭环,LLM 大模型代理模块预留本地大模型部署接口,未来可实现完全离线推理,彻底摆脱网络依赖,契合边缘 AI 发展趋势。 3、消息总线架构,实现模块高度解耦,具备极强扩展性 MimiClaw 采用消息总线作为所有模块的通信枢纽,彻底打破了传统嵌入式系统“模块间直接调用”的耦合性设计,所有模块均通过消息总线收发数据、交互指令,这种架构设计不仅提升了系统的稳定性与可维护性,更让系统具备极强的扩展能力,具体表现为: 模块间无直接依赖,所有交互均通过消息总线完成,例如: - 屏幕 ↔ AI:AI 生成的回复消息通过消息总线发送至屏幕模块,屏幕模块接收消息后展示内容,无需直接调用 AI 核心函数; - 按键 ↔ WiFi:用户通过按键触发 WiFi 配置指令,指令通过消息总线发送至 WiFi 管理模块,实现 WiFi 连接、断开等操作,按键模块与 WiFi 模块无直接关联; - Telegram ↔ LLM:用户通过 Telegram 发送的指令,经消息总线转发至 LLM 大模型代理模块,推理结果再通过消息总线反馈至 Telegram 模块,实现远程交互的闭环; - WebSocket ↔ 技能:网页端通过 WebSocket 发送的技能调用指令,经消息总线转发至技能加载器与工具注册表,执行结果再通过消息总线返回至网页端。 这种解耦设计让系统扩展变得极为便捷,无需修改主程序核心逻辑,即可新增各类功能模块,例如:本地大模型部署模块、电机控制模块、多类型传感器采集模块、多智能体协同通信模块等,极大降低了二次开发成本,适配不同场景的定制化需求。 4、硬件交互智能化,打造差异化核心竞争力 硬件交互的智能化的是 MimiClaw 区别于其他嵌入式 AI 助手的核心竞争力,它将硬件外设与 AI 智能深度融合,实现“感知-反馈-控制”的全流程智能化,让 AI 智能体不再是“看不见、摸不着”的软件程序,而是具备物理交互能力的智能设备,具体实现如下: - 摇一摇交互智能化:通过 IMU 传感器实时采集设备姿态与加速度数据,当检测到用户摇晃设备时,自动触发 config_screen_toggle 回调函数,弹出系统配置界面,无需手动操作按键,实现“无接触”便捷配置; - RGB 灯效智能化:RGB 彩灯模块根据系统运行状态自动切换颜色,如开机时红灯(初始化中)、WiFi 连接成功时绿灯(正常运行)、WiFi 连接超时或存储异常时黄灯(异常提示),让用户通过灯光即可快速判断系统状态,无需查看日志或屏幕; - 屏幕显示智能化:屏幕不仅能展示固定的系统信息,还能实时显示 AI 交互回复、WiFi IP 地址、技能运行状态等动态内容,同时支持 UI 界面切换,用户可通过按键或摇一摇操作,便捷进入配置界面、技能管理界面,实现可视化管控; - 按键控制智能化:实体按键支持自定义功能映射,可根据用户需求配置为“确认”“返回”“重启”“切换技能”等操作,配合屏幕 UI 界面,实现简单、直观的本地管控,降低使用门槛,适配不同用户群体。 5、多通道统一交互,适配全场景使用需求 MimiClaw 构建了“本地+远程”多维度统一交互体系,支持 4 种交互方式,所有交互指令均通过消息总线统一调度、统一处理,确保不同渠道的交互体验一致,同时适配不同场景下的使用需求,具体如下: (1)串口 CLI 交互:无需网络,通过串口连接设备即可输入命令行指令,实现系统调试、参数配置、日志查看、技能调用等操作,适合开发人员调试与本地维护场景; (2)WebSocket 网页交互:WiFi 连接成功后,通过 WebSocket 服务器实现网页端与设备的实时交互,可在网页端查看系统状态、发送 AI 指令、配置系统参数,适合远程管控与可视化操作场景; (3)Telegram APP 交互:通过 Telegram 机器人模块,用户可在任何有网络的地方,通过 Telegram APP 与 MimiClaw 交互,发送指令、接收 AI 回复、远程控制硬件,适合移动场景下的远程操作; (4)本地硬件交互:通过屏幕、按键、IMU 传感器实现本地交互,无需依赖网络与外部设备,适合设备现场操作,如本地配置 WiFi、查看 AI 回复、控制硬件等场景。 多通道统一调度的设计,让 MimiClaw 可适配开发调试、日常使用、远程管控、现场操作等多种场景,极大提升了系统的实用性与灵活性。 6、高稳定性设计,适配 ESP32-S3 资源受限场景 针对 ESP32-S3 微控制器“资源有限、运行环境复杂”的特点,MimiClaw 主程序在设计过程中融入了多重容错与优化机制,确保系统长期稳定运行,降低故障概率,具体设计如下: - NVS 损坏自动修复:init_nvs() 函数中,若检测到 NVS 分区损坏、空间不足或版本不兼容,会自动擦除分区并重新初始化,确保 WiFi 配置、密钥等关键信息不丢失,避免系统因存储异常无法启动; - SPIFFS 挂载失败自动格式化:init_spiffs() 函数中,若 SPIFFS 文件系统挂载失败,会自动格式化分区并重新挂载,保障记忆文件、技能脚本等可正常存储与读取,避免因存储问题导致 AI 功能失效; - WiFi 30 秒超时保护:WiFi 连接过程中设置 30 秒超时时间,若超时未连接成功,系统会打印提示信息,引导用户检查 WiFi 配置,避免系统因无限等待 WiFi 连接而阻塞; - 任务绑定 CPU 核心:将出站消息分发等关键任务绑定到 ESP32-S3 的指定 CPU 核心,合理分配双核资源,避免任务阻塞,提升系统实时性与运行稳定性; - 内存实时监控:系统启动时打印内部 RAM 与 PSRAM 空闲容量,实时监测内存使用情况,便于开发人员优化程序,避免因内存不足导致程序崩溃,适配 ESP32-S3 资源受限的特点; - 错误自动打印:各模块初始化、任务执行过程中,若出现异常,会自动打印错误日志(含错误代码与原因),便于开发人员快速排查问题,降低维护成本,提升系统可维护性。 这些高稳定性设计,让 MimiClaw 能够在 ESP32-S3 资源受限的嵌入式环境下,实现 24/7 低功耗稳定运行,满足工业控制、智能家居、便携设备等场景的长期运行需求。 |
|
## 五、关键函数作用(简明版) 本章节聚焦 MimiClaw 主程序中最核心、最常用的关键函数,以“简明易懂、重点突出”为原则,明确各函数的核心作用、执行逻辑及关联功能,无需冗余展开,便于快速掌握核心函数的核心价值,具体如下: 1、init_nvs() 核心作用:负责 NVS(非易失性存储)模块的初始化与管理,主要用于持久化保存系统关键配置信息,包括 WiFi 账号密码、API 密钥、系统参数等。同时具备容错能力,若检测到 NVS 分区损坏、空间不足或版本不兼容,会自动擦除并重新初始化,确保存储信息的完整性与可用性,为系统重启后快速恢复配置提供支撑。 2、init_spiffs() 核心作用:负责 SPIFFS 嵌入式文件系统的初始化与挂载,核心用于存储 MimiClaw 系统的核心数据,包括 AI 长期记忆文件、技能脚本文件、用户自定义配置文件等。支持文件的读写、修改与删除操作,同时具备挂载失败自动格式化的容错机制,保障 AI 记忆、技能扩展等功能的正常运行。 3、outbound_dispatch_task() 核心作用:作为系统的消息分发中心,运行于独立任务(绑定指定 CPU 核心),负责从消息总线的出站队列中读取各类消息(主要为 AI 智能体返回的响应消息),并根据消息的目标交互渠道,精准分发至对应模块,实现多通道消息的统一调度,具体分发对象包括: •Telegram 模块:将消息发送至 Telegram APP,实现远程交互反馈; •WebSocket 模块:将消息推送至网页端,实现实时交互展示; •屏幕模块:将消息显示在本地屏幕上,实现信息可视化反馈; •串口 CLI 模块:将消息输出至串口,便于开发人员调试查看。 4、app_main() 核心作用:MimiClaw 主程序的总入口函数,是整个系统的“启动总开关”。函数内部按“硬件初始化→基础系统初始化→AI 核心初始化→网络服务启动”的逻辑,按序调度所有核心模块的初始化与启动操作,统筹管理系统从上电启动到待机运行的全生命周期,确保各模块协同有序运行,是整个系统正常工作的核心保障。 |
|
## 六、系统最终形态 基于前述的模块化架构、核心功能与技术亮点,MimiClaw 主程序最终构建了一个具备多元能力、适配多场景的 ESP32 边缘 AI 智能体,其核心形态定位为:可移动、可交互、可思考、可扩展、低功耗、离线可用,打破了传统嵌入式设备与 AI 助手的功能边界,兼具实用性与扩展性,能够根据不同场景需求,灵活适配多种产品形态,具体可实现的形态如下: 1、AI 智能音箱:依托本地 AI 推理能力与多通道交互特性,集成音频输入输出模块后,可实现语音唤醒、语音对话、音乐播放、信息查询等功能,无需依赖云端,离线状态下也能完成基础交互,同时通过 RGB 灯光反馈播放状态,屏幕显示交互内容,提升使用体验。 2、机器人大脑:作为微型机器人的核心控制单元,可对接电机、舵机、各类传感器(如红外、超声),通过 AI 智能体的决策能力,实现机器人的自主移动、避障、姿态控制、任务执行等功能,消息总线架构可灵活扩展机器人的功能模块,适配小型服务机器人、教育机器人等场景。 3、智能家居中控:利用 WiFi 管理与多通道交互能力,可对接各类智能家居设备(如灯光、窗帘、空调),通过本地按键、摇一摇、远程 APP 或网页端,实现智能家居设备的集中管控与自动化联动,AI 智能体可根据用户习惯,自动调整设备运行状态,打造个性化智能家居场景。 4、便携智能助手:凭借 ESP32-S3 的低功耗特性与独立运行能力,可做成便携设备,支持离线记忆、本地交互、技能调用等功能,用户可通过屏幕、按键或摇一摇操作,快速获取 AI 辅助、任务提醒、参数查询等服务,适配户外、出差等无网络场景。 5、自动化控制网关:依托工具注册表与多任务调度能力,可作为工业或家庭自动化控制的核心网关,采集各类传感器数据,执行自动化控制指令,同时通过网络通信模块,实现远程监控与指令下发,保障自动化系统的稳定运行,适配小型自动化生产线、家庭安防等场景。 6、迷你开源小龙虾机器人:结合硬件交互模块与 AI 核心能力,可作为开源教育项目的载体,通过扩展电机、机械结构,实现类似“小龙虾”的移动、动作展示功能,同时开放技能脚本与模块接口,供开发者学习、修改与扩展,适配教育、开源社区等场景,助力嵌入式 AI 知识普及。 综上,MimiClaw 主程序并非单一功能的嵌入式程序,而是一个灵活、可扩展的边缘 AI 智能体开发平台,其最终形态可根据实际需求灵活定制,既具备产品化落地的潜力,也能满足开源学习、二次开发的需求,真正实现了“一个主程序,多种产品形态”的核心目标。 ## 七、总结 MimiClaw 主程序是一套专门运行在 ESP32‑S3 微控制器上的完整边缘 AI 智能体系统,是嵌入式 AI 技术与智能硬件深度融合的代表性开源架构。该系统以“独立运行、智能交互、灵活扩展、稳定可靠”为核心目标,全面集成了屏幕显示、RGB 彩灯、实体按键、IMU 陀螺仪/加速度计等多元化硬件交互模块,打破了传统嵌入式设备“无交互、弱智能”的局限,让 AI 智能体实现了“看得见、摸得着、可操作”的物理交互体验。 在核心能力上,MimiClaw 主程序实现了本地 AI 思考、多通道消息交互、模块化扩展与高可靠运行的全方位突破:通过边缘 AI 架构将 AI 核心能力完整下沉至 MCU 本地,实现离线记忆、本地推理与工具调用,摆脱了对云端与高性能设备的依赖;依托消息总线架构实现各模块高度解耦,具备极强的二次开发与功能扩展能力,可灵活适配不同场景需求;融入多重容错优化机制,完美适配 ESP32-S3 资源受限的运行环境,保障系统 24/7 低功耗稳定运行。 从定位来看,MimiClaw 并非单一功能的嵌入式程序,而是一个灵活可定制的边缘 AI 智能体开发平台,既具备产品化落地的潜力,可适配 AI 智能音箱、机器人大脑、智能家居中控等多种产品形态,又能满足开源学习、技术研究与二次开发的需求,为嵌入式 AI 领域的普及与创新提供了便捷、高效的技术载体,助力开发者快速实现边缘 AI 智能硬件的开发与落地。  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶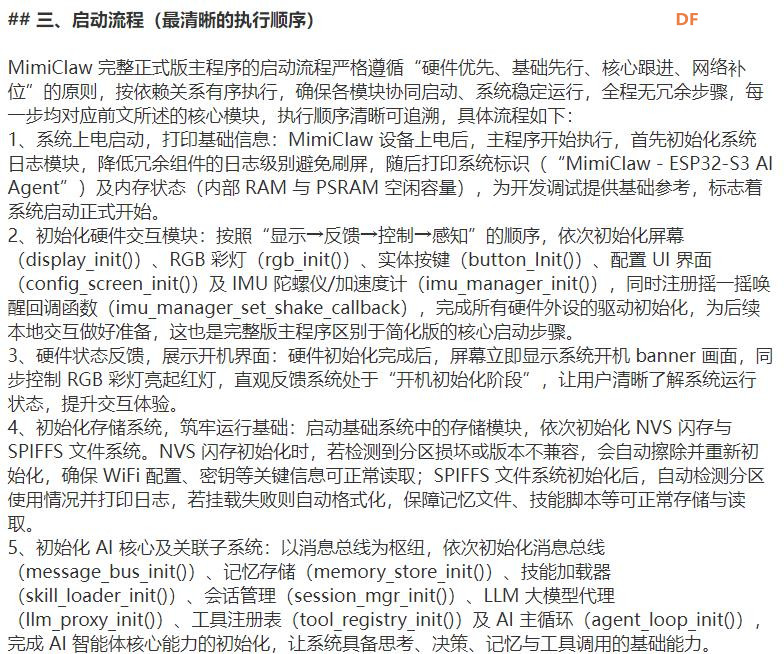



 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






