|
3812| 15
|
[项目] 【花雕】ESP32 + MimiClaw(迷你小龙虾)+ BLDC 机器人控制 |

 这是嵌入式 AI 智能体 + 无刷电机驱动的前沿组合:MimiClaw 做 AI 大脑决策,ESP32 做硬件主控,Arduino BLDC 做无刷电机执行层,实现能自主思考、精准运动、低功耗、低成本的智能机器人控制。本文以简单方式,从底层原理、核心组件特点、协同架构、应用场景、避坑要点五个专业维度来完整拆解。 一、整体架构(专业核心) 这套系统是三层解耦架构,稳定性、扩展性极强: 1、感知 / 决策层:MimiClaw(ESP32-S3 纯 C AI Agent) 接收指令 → 大模型思考 → 生成运动 / 控制指令 2、主控通信层:ESP32 原生硬件 处理 GPIO、PWM、串口通信、电机时序 3、执行驱动层:Arduino BLDC 驱动方案 精准控制 BLDC 无刷电机,实现机器人关节 / 底盘运动 通信方式:I2C / UART / PWM 直连,低延迟(<10ms) 二、各核心组件专业详解 1. MimiClaw 迷你小龙虾(AI 大脑) 核心特点 纯 C 语言、无操作系统:直接跑在 ESP32 硬件上,无 Linux/Windows,实时性拉满 轻量化 AI 智能体:支持 ReAct 逻辑、本地记忆、工具调用、自主任务 极低功耗:<0.5W,机器人可长期待机运行 硬件原生控制:直接操作 GPIO、ADC、PWM,无缝对接电机驱动 开源免费:MIT 协议,可二次开发、定制机器人逻辑 双核心分工:Core0 网络 / AI,Core1 硬件控制,不卡顿 机器人控制中的作用 自主规划机器人运动路径 语音 / 文字指令解析(如 “前进”“抓取”“返航”) 自主避障、定时任务、状态记忆 多电机协同调度 2. ESP32(硬件主控核心) 核心特点 高性能双核 MCU:240MHz,处理 AI + 电机控制无压力 丰富外设:PWM、UART、I2C、SPI、蓝牙、WiFi 大内存:必须 16MB Flash + 8MB PSRAM(MimiClaw 强制要求) 实时性:FreeRTOS 内核,电机控制无抖动 无线扩展:WiFi 远程控制、蓝牙近场控制 机器人控制中的作用 运行 MimiClaw AI 系统 发送控制信号给 BLDC 电机驱动 采集传感器(陀螺仪、红外、超声波) 无线通信(远程遥控 / 数据回传) 3. Arduino BLDC 无刷电机驱动(执行层) 核心特点 BLDC = 无刷直流电机:效率高、寿命长、噪音低、精准调速 Arduino 生态兼容:简单 API、调试方便、资料极多 支持 FOC 矢量控制:超平滑运动,机器人关节零抖动 多种控制模式:位置 / 速度 / 力矩三环控制 适配范围广:小功率云台 → 大功率机械臂都能用 机器人控制中的作用 把 ESP32 的数字信号 → 电机精准转动 机器人底盘驱动、机械臂关节、云台、夹爪 高精度定位(±0.1°) 三、三者协同工作流程(专业时序) plaintext 用户指令 → MimiClaw AI分析 → 生成运动指令 → ESP32发送信号 → Arduino BLDC驱动 → BLDC电机执行 → 传感器回传 → MimiClaw闭环调整 全程闭环控制,机器人可自主修正运动误差。 四、典型应用场景(工业 / 创客 / 科研全覆盖) 1. 小型自主移动机器人(AGV) 自主导航、避障、循迹 室内配送、巡检机器人 2. 仿生机器人 / 四足机器人 无刷关节 + AI 步态自主规划 低成本、高机动性 3. 机械臂 / 柔性执行器 AI 视觉抓取、自主分拣 高精度 FOC 控制 4. 智能云台 / 摄影机器人 自主追踪、稳定防抖 低噪音、长续航 5. 科研教学平台 AI + 无刷电机 + 嵌入式一体化实验 机器人学习最佳低成本方案 五、必须注意的专业事项(避坑指南) 1. 硬件选型硬性要求 ESP32 必须是 S3 版本,且满足: 16MB Flash 8MB PSRAM 普通 ESP32/C3/S2 无法运行 MimiClaw BLDC 电机必须配带 FOC 的专用驱动板 如:SimpleFOC、ODrive、小瓢虫驱动 2. 电源系统是关键 MimiClaw + ESP32:3.3V BLDC 电机:12V~24V(大功率) 必须共地隔离,避免电机干扰 AI 系统死机 大电流电机必须独立供电,不可共用 USB 电源 3. 实时性冲突问题 MimiClaw 的 AI 推理会占用 CPU 电机 PWM/FOC 控制需要高优先级中断 必须在代码中配置:电机控制 > AI 任务 优先级 4. 通信延迟控制 优先使用硬件 UART/I2C 禁止用软件模拟通信,会导致电机抖动 控制指令频率 ≥ 50Hz 保证运动流畅 5. 散热与电流 BLDC 电机堵转电流极大 必须加过流保护、温度保护 避免烧毁驱动板 / ESP32 6. 软件框架兼容 MimiClaw 是纯 C + FreeRTOS Arduino BLDC 库可直接移植,无需修改底层 推荐使用SimpleFOC作为驱动核心 六、专业总结 1、这套方案是目前全球最小、最便宜、最完整的 AI 机器人控制方案: MimiClaw = 自主思考的 AI 大脑 ESP32 = 高性能硬件主控 Arduino BLDC = 精准运动执行器 优势:低成本、低功耗、开源可定制、实时性强、AI 原生 适合:科研、创客、小型商用机器人、嵌入式 AI 学习 2、关键点回顾 架构:AI 决策层 + 硬件主控层 + 电机执行层,三层协同 核心:ESP32-S3 必须满足 16MB+8MB 配置 优势:AI 自主控制 + 无刷电机高精度运动 风险:电源共地、优先级配置、通信延迟是三大关键点 |
|
参考案例之一:AI 指令控制电机 正转 / 反转 / 停止(基础版) 功能:MimiClaw 解析文字指令(前进 / 后退 / 停止),控制 BLDC 电机速度 |
|
案例二:AI 控制机器人关节角度(精准定位) 功能:MimiClaw 计算角度 → 控制机械臂 / 机器人关节转到指定位置(0~180°) |
|
案例 三:MimiClaw 自主闭环控制(带传感器反馈) 功能:AI 实时读取电机状态 → 自动调整速度 / 角度 → 机器人自主运动 要点解读 要点 1:MimiClaw 与 BLDC 必须用硬件串口通信 原因:MimiClaw 运行 AI 任务,软件串口会延迟、丢包 正确方案:使用 Serial1/Serial2 硬件 UART 通信速率:115200 稳定不丢指令 要点 2:电机控制优先级必须高于 AI 任务 关键:ESP32 双核,电机 FOC 必须高优先级 原理:AI 推理会占用 CPU,电机控制被打断会出现抖动、失步 MimiClaw 底层已做优化,直接使用即可 要点 3:电源必须隔离!不能共用 USB 危险:BLDC 电机启动电流大,会拉低电压 → ESP32 重启、AI 死机 正确接法: ESP32:3.3V USB / 独立电源 电机:12V/24V 独立电源 共 GND,不共 VCC 要点 4:FOC 参数必须匹配电机,否则无法转动 必须修改:BLDCMotor motor = BLDCMotor(极对数) 常见:7 极对、11 极对(电机铭牌标注) 错误现象:电机抖动、啸叫、不转、发热 要点 5:MimiClaw AI 适合做决策,不适合做实时控制 正确分工: MimiClaw:做思考、规划、指令生成(大脑) ESP32+BLDC:做高速运动控制(身体) 禁忌:不要让 AI 直接参与 PWM 波形生成,会严重延迟  |
|
本帖最后由 驴友花雕 于 2026-3-26 11:39 编辑 附录:MimiClaw(迷你小龙虾) 是一款专为嵌入式与机器人场景设计的轻量化本地 AI 智能体(AI Agent),是个国外的开源项目,其基于 ESP32-S3 芯片开发,主打无 OS、纯 C、低功耗、实时控制,是机器人的 “本地大脑”,能让设备自主思考、执行复杂任务。 一、核心定位与硬件 全称:MimiClaw 迷你小龙虾(ESP32-S3 AI Agent) 核心芯片:ESP32-S3(双核 Xtensa LX7) 运行环境:无操作系统(裸机)、纯 C 语言 开发 功耗:< 0.5W,支持长期待机 协议:MIT 开源,可自由二次开发 二、核心技术特点(机器人大脑) 1、双核心分工(不卡顿) Core0:负责网络通信、AI 推理、大模型交互 Core1:专职硬件控制(GPIO/PWM/ADC),实时响应 2、轻量化 AI 能力 支持 ReAct 推理(思考→调用工具→执行→反馈) 本地记忆、上下文理解、自主任务规划 直接对接电机、传感器,无需中间层 3、硬件原生控制 直接输出 GPIO、PWM、ADC 读取 无缝驱动 BLDC 无刷电机、舵机、编码器 适合机器人、机械臂、智能小车的底层控制 三、典型应用(机器人 / 智能硬件) 自主机器人:路径规划、避障、语音指令(前进 / 抓取 / 返航) 电机协同:多电机同步调速、位置闭环、力矩控制 DIY 智能车:本地 AI 决策 + 无刷驱动 低功耗设备:长期待机、定时任务、状态记忆 四、与小米 Miclaw(手机小龙虾)的区别 MimiClaw(迷你小龙虾):嵌入式 / 机器人专用、ESP32 本地运行、无 OS、控制电机 / 硬件 Xiaomi Miclaw(小米小龙虾):手机系统级 AI、澎湃 OS、控制手机 / 米家生态 五、一句话总结 MimiClaw = 装在 ESP32 上的、能直接控电机的本地 AI 大脑,纯 C 裸跑、低功耗、实时性强,非常适合DIY机器人底盘做自主控制。 六、官方文档与代码仓库 官方文档:https://mimiclaw.io 代码仓库:https://github.com/memovai/mimiclaw |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 四天前,偶尔在头条上见到这个提法,开始关注了
四天前,偶尔在头条上见到这个提法,开始关注了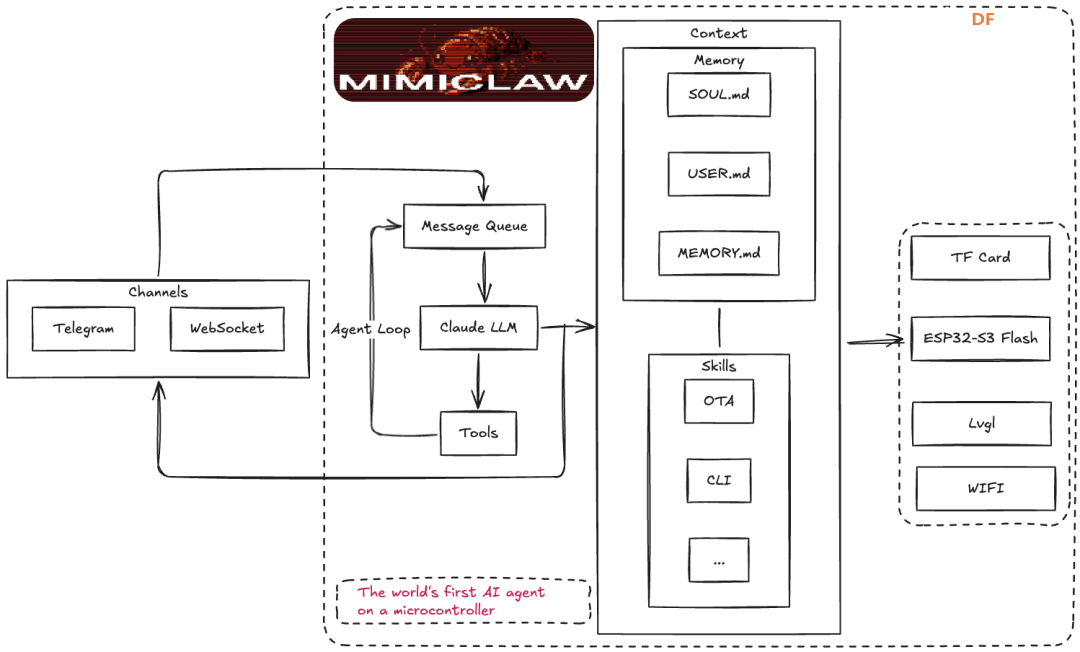


 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






