|
230| 0
|
[讨论] 唯理科技发布用于科研和腕部数据采集训练的神经腕带 |
|
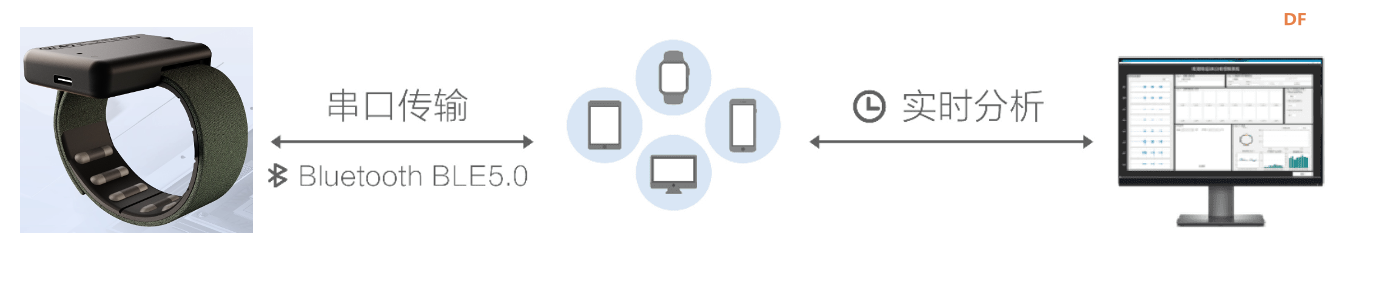
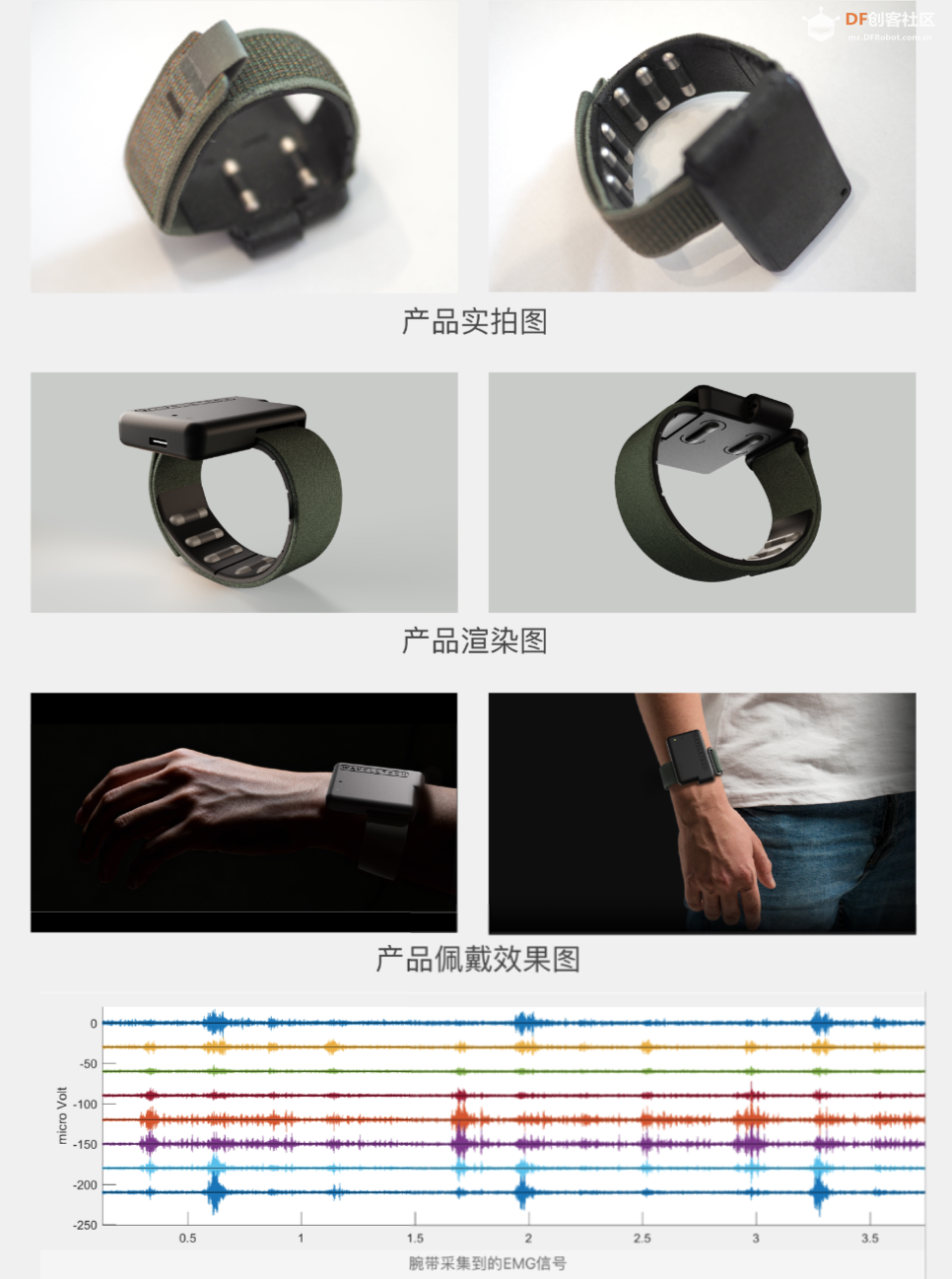
Meta近日在发布会上公布了其神经肌电腕带产品,创新的交互方式让人机交互更具想象空间。其技术原理是使用生物电芯片采集神经电位和EMG,通过算法来判断手势运动意图,这让肌电神经腕带逐渐走入更多人的视野,在未来的人机交互场景下拥有很大的想象空间。 主要用途 1. 可以实现对于机械臂、机器人的遥操作 2. 适合于进行手部数据采集,用于手势识别和训练 3. 可以用来对智能眼镜交互 此款腕带硬件介绍 此款产品为唯理科技推出的用于科研和二次开发的神经腕带产品。产品设计对标 Meta神经腕带。柔性带子,圆润的电极。表带宽度仅有25mm(Applewatch ultra表带同宽),表带厚度约2~3mm。整体全柔性。 本产品使用进口生物电芯片实现8个通道的EMG肌电信号采集,同时融入了6轴陀螺仪,最终通过BLE蓝牙或者有线将数据实时发送至匹配的蓝牙接收器。这使得腕带可以精准采集前臂肌肉电位与肢本运动信息进行自然手势识别,为后续的动作手势识别提供良好的基础。EMG肌电采样精度为24bit,采样率250Hz~2kHz,能够容纳更大的信号动态范围。使用本腕带可以实现对大动作和小动作的训练与识别,同时也支持导出原始数据进行二次开发。
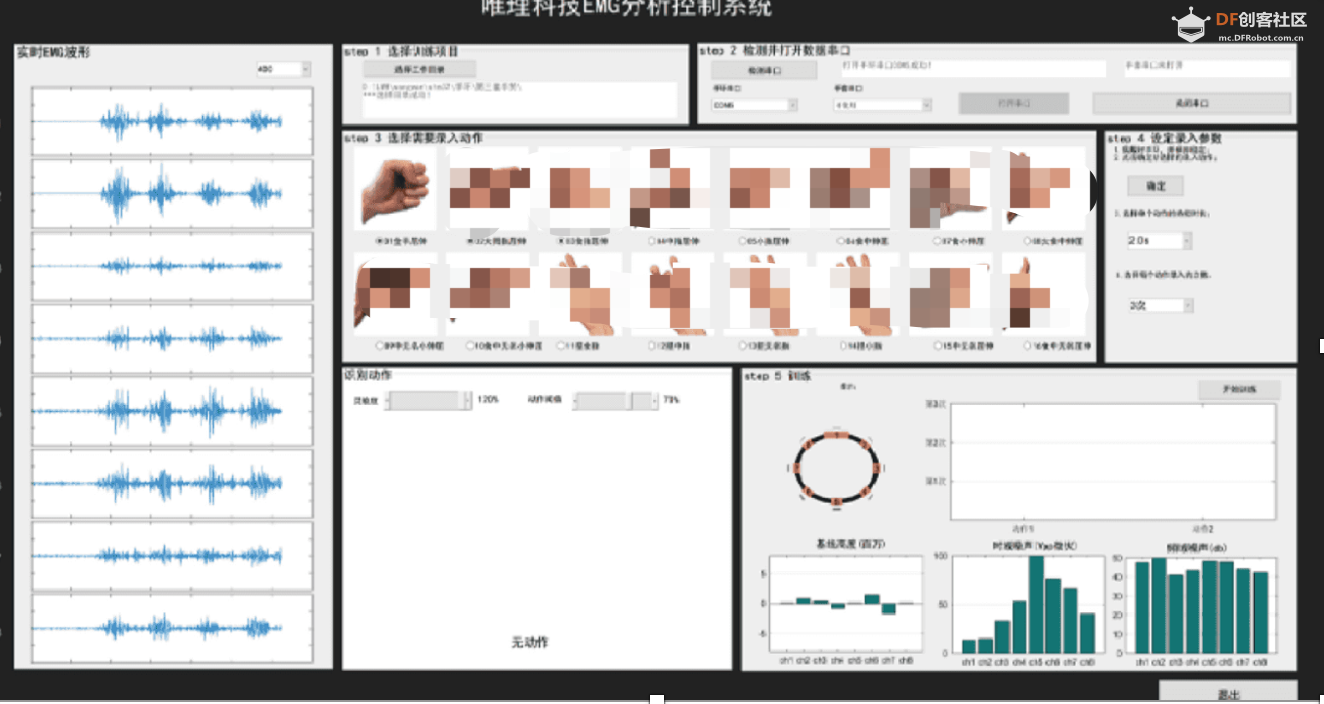
此外,为了方便手势训练以及数据采集,唯理还推出了配套的数据采集和训练软件。 基于windows平台,可对腕带数据进行采集和训练。支持任意手势动作的快速模型训练,训练完成后可以在软件中进行手势实时识别,并可将识别结果设定串口进行发送,用于控制各种外设。
关于唯理科技 苏州唯理科技是一家专注于肌电脑电心电底层技术的创新企业,国内少数拥有自研芯片的脑电脑机接口技术厂商。累计服务30万用户,超50+高校及科研机构。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






