|
3436| 0
|
[项目] 给小智AI装上“手脚”:掌控板语音控制灯带与电机实战 |

|
本帖最后由 云天 于 2026-3-2 21:52 编辑 让小智AI不仅能听会说,还能控制灯带和电机,打造真正的智能硬件终端 【项目缘起】 小智AI 是一款开源的端侧语音助手项目,基于 ESP32 实现,支持唤醒词、语音识别、大模型对话等功能。它的代码结构清晰,硬件抽象层完善,非常适合作为智能硬件的“大脑”。而掌控板作为国内创客教育常用的主控板,集成了 OLED 屏幕、按键、I2C 接口等资源,性价比极高。如果能将小智AI 移植到掌控板上,并扩展出控制灯带、电机的能力,就能打造出一个既能语音交互又能驱动外设的智能终端。 经过一段时间的折腾,我成功将小智AI v2.0.5 移植到了掌控板 1.0 和 2.0 上,并通过 MCP(Model Context Protocol)工具让 AI 可以直接控制 WS2812 灯带和直流电机。这篇文章将分享完整的改造过程,希望给同样想折腾的朋友一些启发。 【准备工作】 硬件清单 掌控板 2.0(或 1.0) ×1 WS2812 灯带(12/24 灯珠) ×1 行空板 K10 IO 扩展板(用于驱动灯带) ×1 micro:bit 掌控 IO 扩展板(用于驱动电机,兼容行空板 M10/K10) ×1 直流电机 ×2 杜邦线、面包板、5V 电源(电机供电) 软件环境 操作系统:Windows 10/11 ESP-IDF v5.5.1(官方推荐) 小智AI 开源代码(版本 2.0.5,从 [GitHub](https://github.com/78/xiaozhi-esp32) 克隆) Git等工具 【移植核心步骤】 适配掌控板引脚配置 小智AI 的板级文件位于 `main/boards/` 目录下,我们以 `bread-compact-esp32` 为模板,修改 `config.h` 中的引脚定义,匹配掌控板的硬件连接: 麦克风 I2S:使用 P8/P9/P13(对应 GPIO26/25/18) 扬声器 I2S:使用 P14/P15/P16(对应 GPIO19/21/5) OLED 屏幕(sh1106,128x64):I2C 引脚 SDA=GPIO23,SCL=GPIO22 按键:A 键=GPIO0(BOOT),B 键=GPIO2 WS2812 灯带:GPIO33 电机驱动 I2C:复用 OLED 的 I2C 总线(地址 0x10) 关键配置如下(已省略无关项): 禁用 4G 模块,默认 WiFi 原项目默认启用了 ML307 4G 模块,我们将其引脚设为 `GPIO_NUM_NC`,并在 `dual_network_board.h` 中将默认网络类型改为 WiFi(`default_net_type = 0`),避免程序启动时卡在检测 4G 模块。 板级文件修改 `esp32_bread_board.cc` 是掌控板的主板类,我们需要: 初始化 I2C 总线(用于 OLED 和电机驱动) 重写 `GetI2CBus()` 虚函数,供 MCP Server 获取总线句柄 注释掉原有的 `LampController`(本例未使用) 适配 SH1106 屏幕:掌控板的 OLED 控制器为 SH1106,与常见的 SSD1306 略有不同。因此,在显示初始化部分需要包含头文件 <esp_lcd_panel_sh1106.h>,并调用 esp_lcd_new_panel_sh1106() 而不是 esp_lcd_new_panel_ssd1306()。原代码中已正确修改。 关键代码: 添加 WS2812 灯带驱动与 MCP 工具 我们使用 `circular_strip.h` 封装好的灯带驱动,在 `mcp_server.cc` 的 `AddCommonTools()` 函数中创建静态对象并注册工具: 这样 AI 就能通过调用 `self.led_strip.set_all` 等工具控制灯带。 添加电机驱动与 MCP 工具 电机驱动板通过 I2C 控制(地址 0x10),原 DF的Arduino 库提供了 `IOBOX_Motor` 类,我们将其移植为 ESP-IDF 风格的 `IOBoxMotor` 类,使用 ESP-IDF 的 I2C 驱动。 "io_box_motor.h": "io_box_motor.cpp" 中实现 I2C 通信,发送三字节命令:`[cmd, dir, speed]`,其中 cmd 为 0x00(M1)或 0x02(M2)。 然后在 `mcp_server.cc` 中,通过 `board.GetI2CBus()` 获取总线,创建电机对象并注册工具: 修改 CMakeLists.txt和 board.h 在 `main/CMakeLists.txt` 中添加 `circular_strip.cpp` 和 `io_box_motor.cpp` 到源文件列表,并依赖 `driver` 和 `led_strip` 组件。 修改 `board.h`,添加虚函数 `virtual i2c_master_bus_handle_t GetI2CBus() const { return nullptr; }`,并包含 `<driver/i2c_master.h>`。 【实际演示】 场景一:语音控制灯带 硬件连接:将 WS2812 灯带的数据线接掌控板 GPIO33,电源和地接 5V 电源(共地)。使用行空板 K10 IO 扩展板接线。 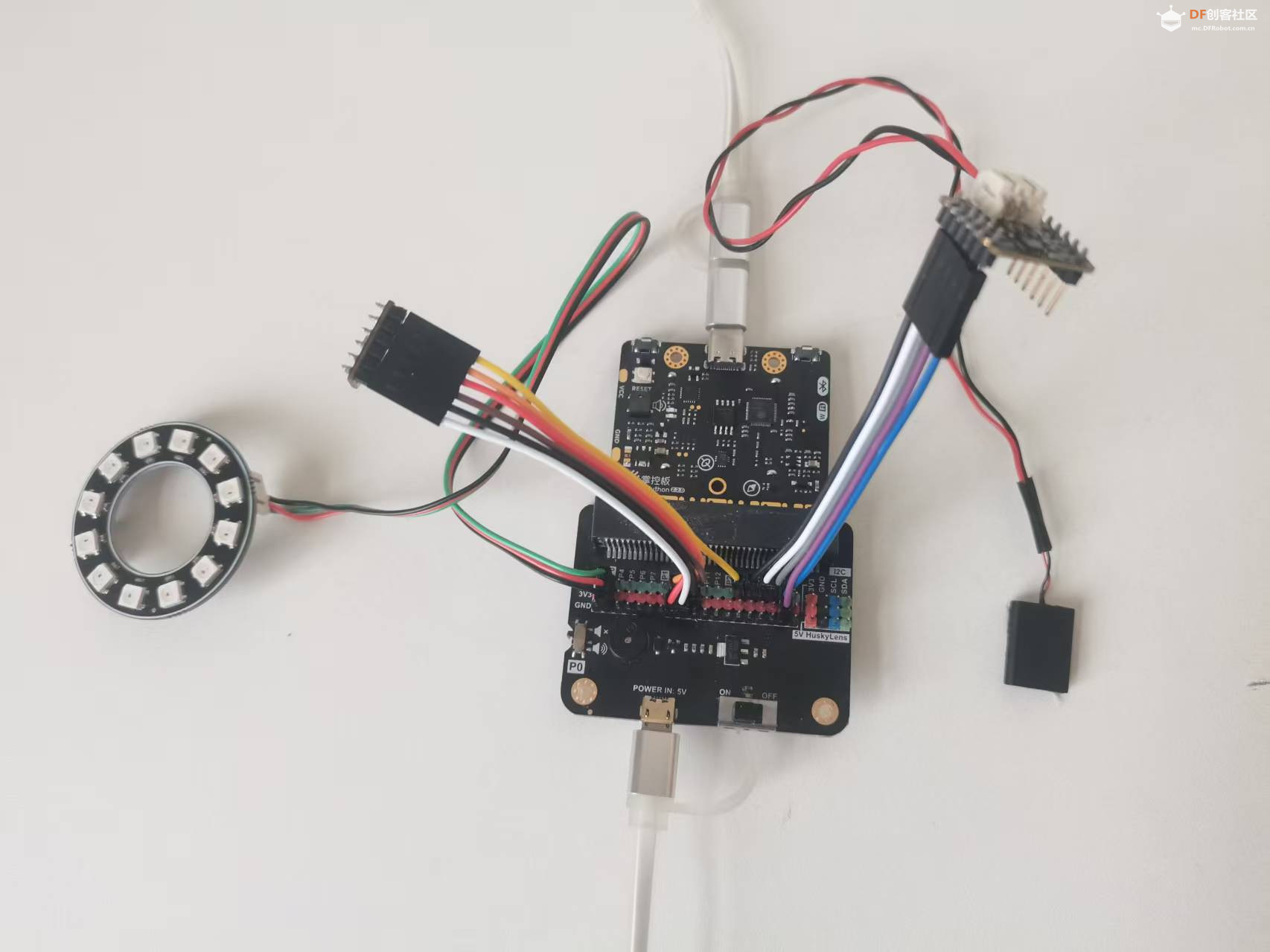 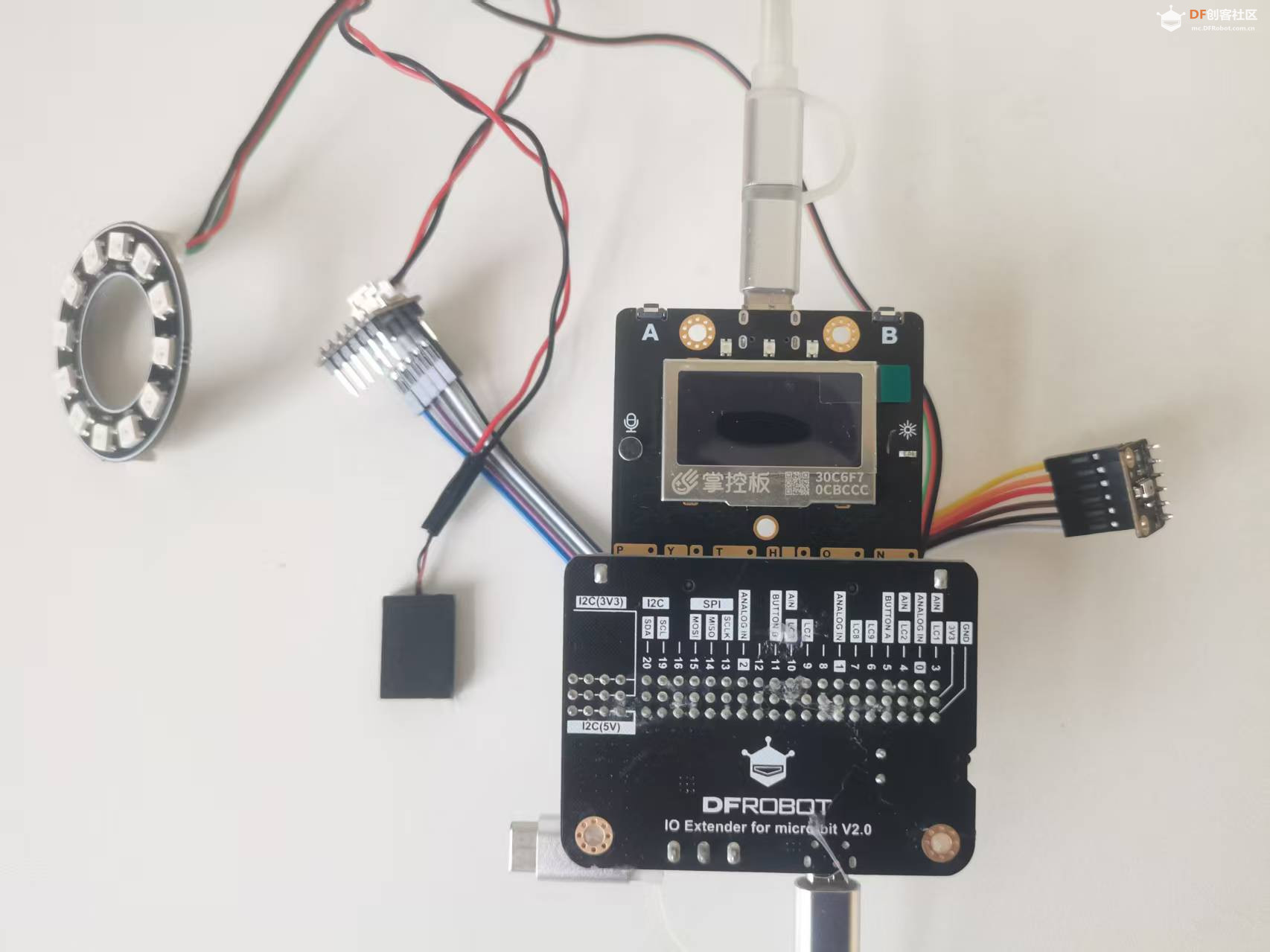  场景二:语音控制电机 硬件连接:将掌控板插在"micro:bit 掌控 IO 扩展板"上,电机接 M1+/M1- 和 M2+/M2-,另需给电机独立供电(如 5V 电池)。注意 I2C 地址必须为 0x10(扩展板默认)。 对小智说:“**M1 电机正转,速度 200**”,电机立即转动。说“**停止所有电机**”,电机停止。如果接上轮子,就可以语音控制小车前进后退。 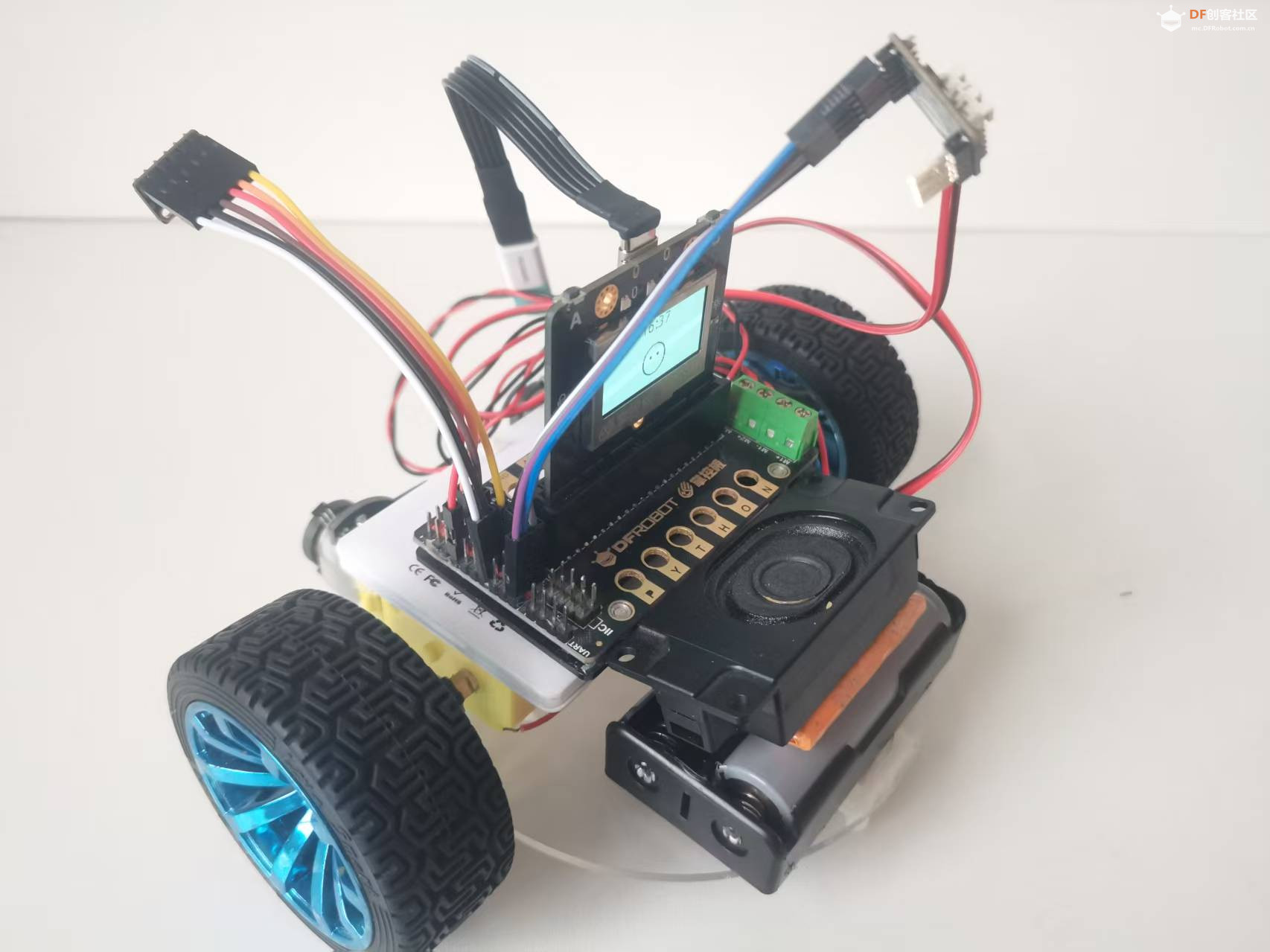  注意:电机驱动需要足够功率,供电不足会导致 I2C 通信失败(出现 NACK 错误)。我一开始就遇到了这个问题,给电机单独供电后解决。 【遇到的问题与解决】 ESP-IDF 版本过低:最新小智AI开源代码2.2.2要求 ESP-IDF≥5.5.2,我本地的 5.5.1 报错,所以我用的智AI开源代码是2.0.5后解决。 ML307 模块初始化卡死:将默认网络改为 WiFi,并禁用引脚。 全局静态对象导致崩溃:灯带对象如果在全局构造,会在驱动未初始化时访问硬件,导致 Guru Meditation 错误。改为函数内静态局部变量后正常。 I2C NACK 错误:起初电机驱动无响应,检查发现是供电不足。给电机驱动板单独供电后问题消失。 【总结与展望】 通过这次移植,我深刻体会到小智AI 框架的灵活性。它的 MCP 机制让添加新硬件变得异常简单——只需实现硬件驱动,然后在 MCP Server 中注册工具,AI 就能像调用函数一样控制外设。掌控板作为主控,性能足够、接口丰富,非常适合做语音交互的载体。 未来,我计划继续扩展更多传感器和执行器,比如舵机、温湿度传感器、摄像头等,让小智AI 能感知环境并做出更复杂的动作。也希望这篇文章能抛砖引玉,让更多人玩转小智AI,创造出有趣的智能硬件项目。 【项目附件】 修改后的核心代码文件(config.h、esp32_bread_board.cc、mcp_server.cc、io_box_motor.h/cpp、dual_network_board.h、board.h、CMakeLists.txt)已打包,可下载。  main.zip main.zip |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






