|
4198| 0
|
[项目] 给小智AI装身体:FireBeetle ESP32-S3驱动四足机器人+2.8寸屏 |

|
本帖最后由 云天 于 2026-3-6 20:09 编辑 用语音唤醒AI,让它不仅能聊天,还能站起来、招手、动耳朵——这才是真正的智能伙伴! 【项目背景】 小智AI开源项目相信很多人都玩过,它把大模型装进了小小的ESP32开发板,让我们可以和AI面对面聊天。但你是否想过,让小智AI拥有一个“身体”?我利用FireBeetle ESP32-S3、2.8寸TFT触摸屏、六个舵机等硬件,给小智AI安装了一套四足机器人外壳,现在它不仅能听会说,还能通过语音指令做出各种动作——前进、后退、左转、右转、坐下、趴下、招手、动耳朵……甚至回答问题时还会配合点头、动耳朵卖萌! 【项目亮点】 1. 首次在FireBeetle ESP32-S3上成功驱动2.8寸320x240 TFT触摸屏,显示AI的表情、对话内容和设备状态,交互感直接拉满。 2. 完美集成六路舵机控制,让四足机器人能完成复杂的步态动作,且不干扰音频和屏幕显示。 3. 深度定制小智AI开源固件,通过MCP工具让AI直接调用舵机动作,你可以用自然语言指挥它:“向前走三步”、“开心地招招手”。 【硬件清单】
【软件准备】 1. 小智AI开源项目代码 克隆仓库:`git clone https://github.com/78/xiaozhi-esp32.git` 本项目基于小智AI v2.0.5版本开发。 2. 开发环境 安装ESP-IDF v5.1+ 配置FireBeetle ESP32-S3为目标芯片 【硬件连接】 根据我的配置文件 `config.h`,各模块引脚定义如下:
注意:由于ESP32-S3的PWM通道有限,我复用了LEDC定时器,将所有舵机挂载到同一个定时器(TIMER2)上,使用不同通道(2~7),避免了与屏幕背光(可能占用通道0/1)的冲突。 【硬件组装】 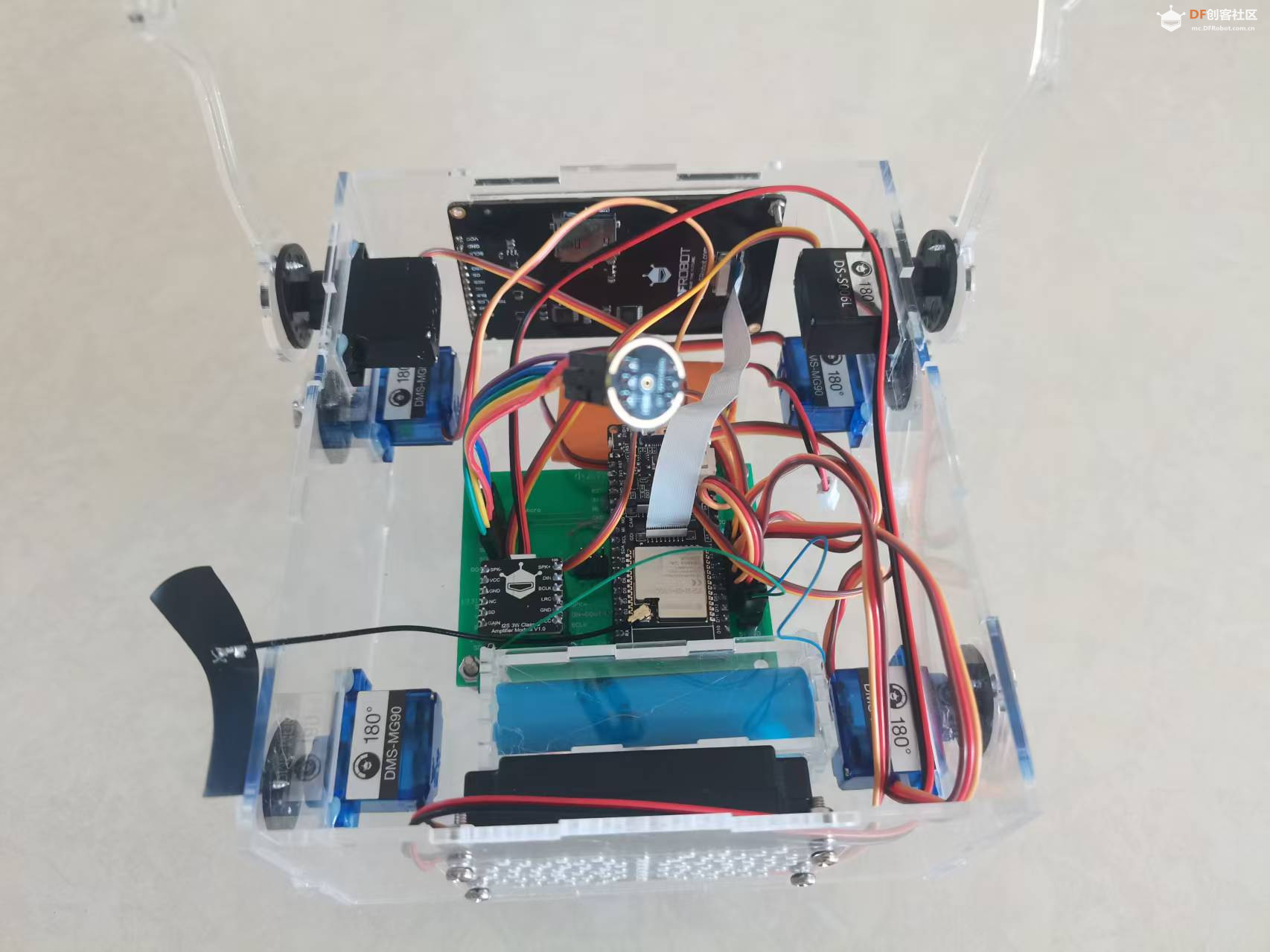 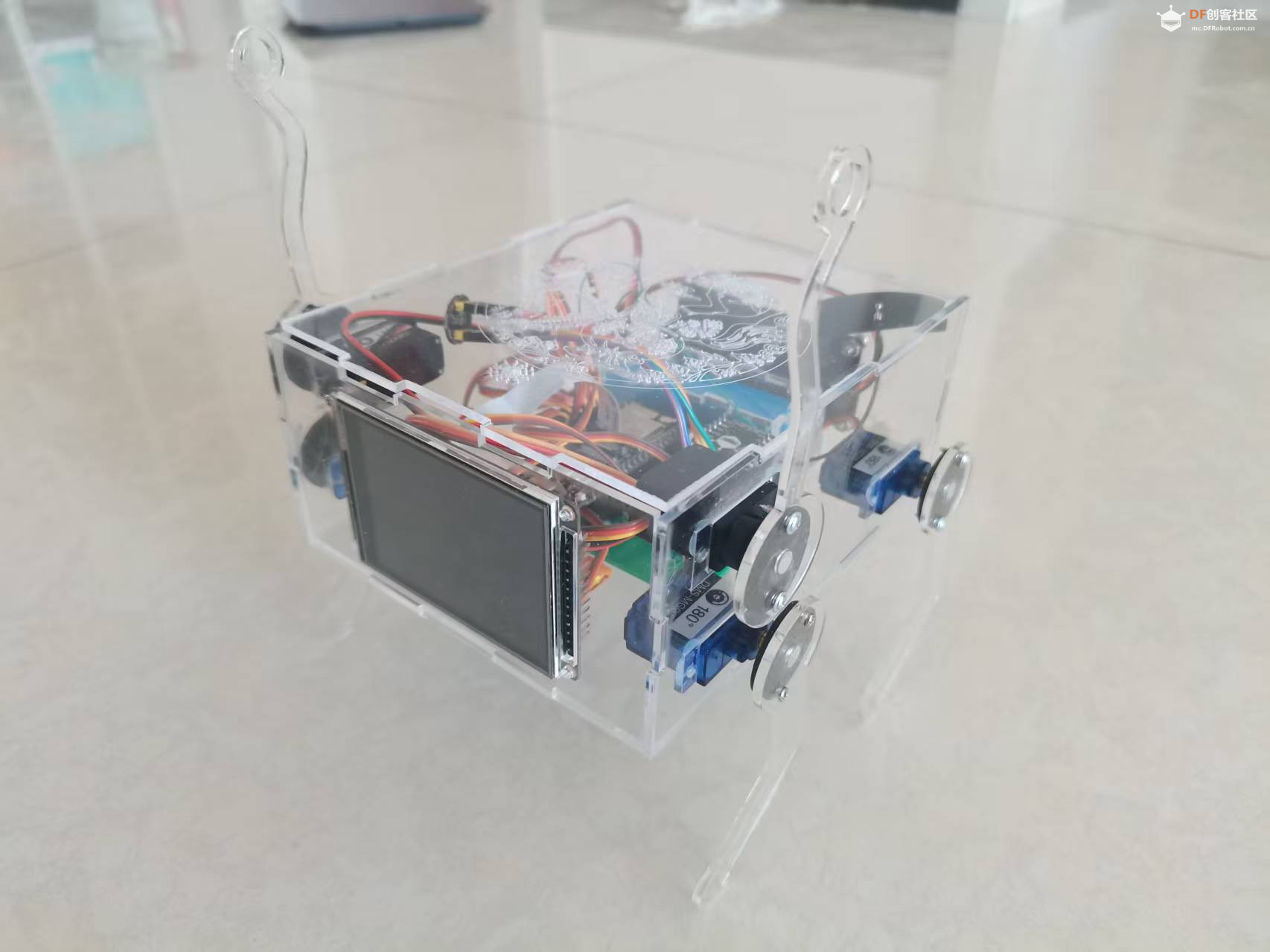 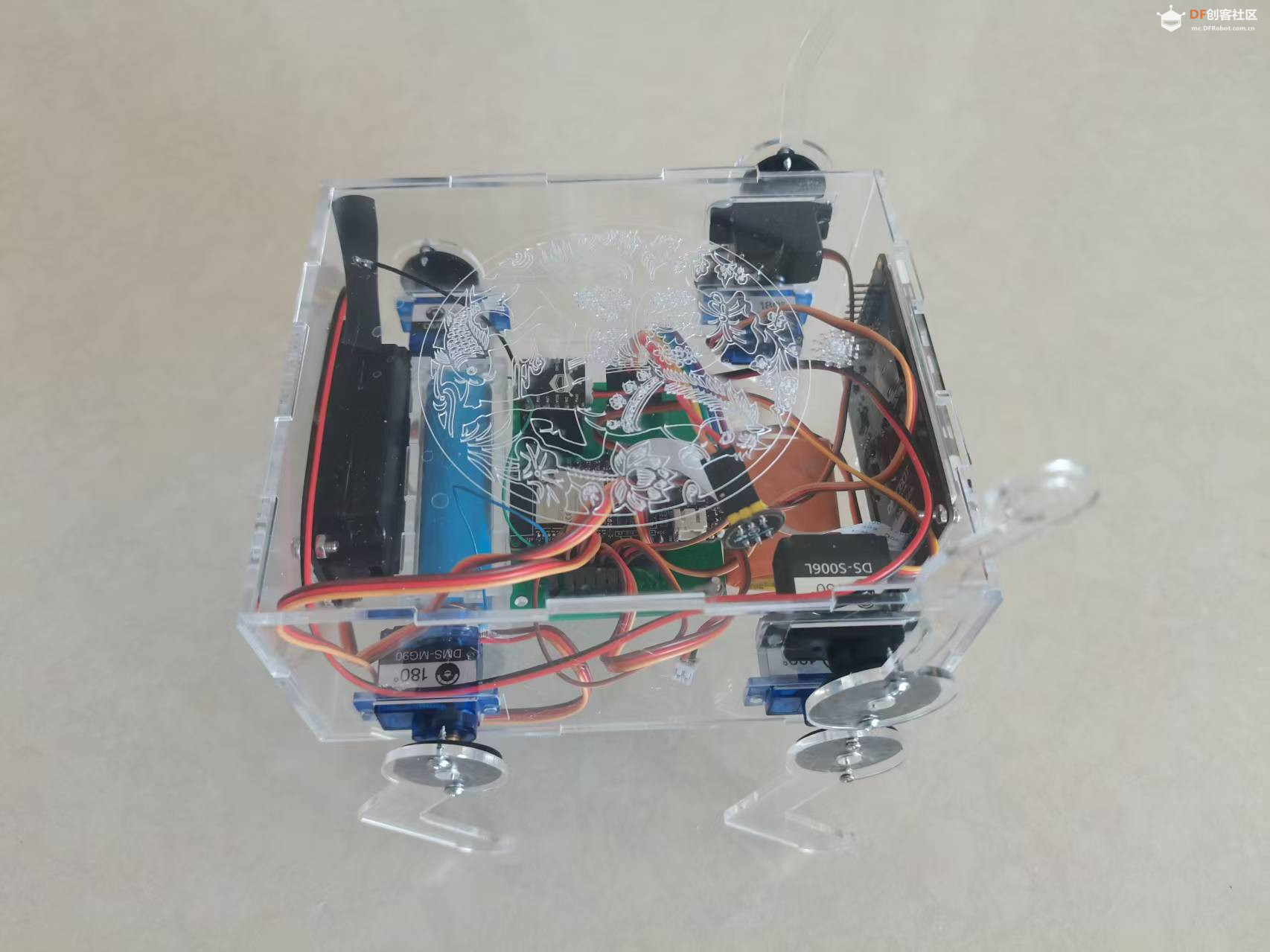 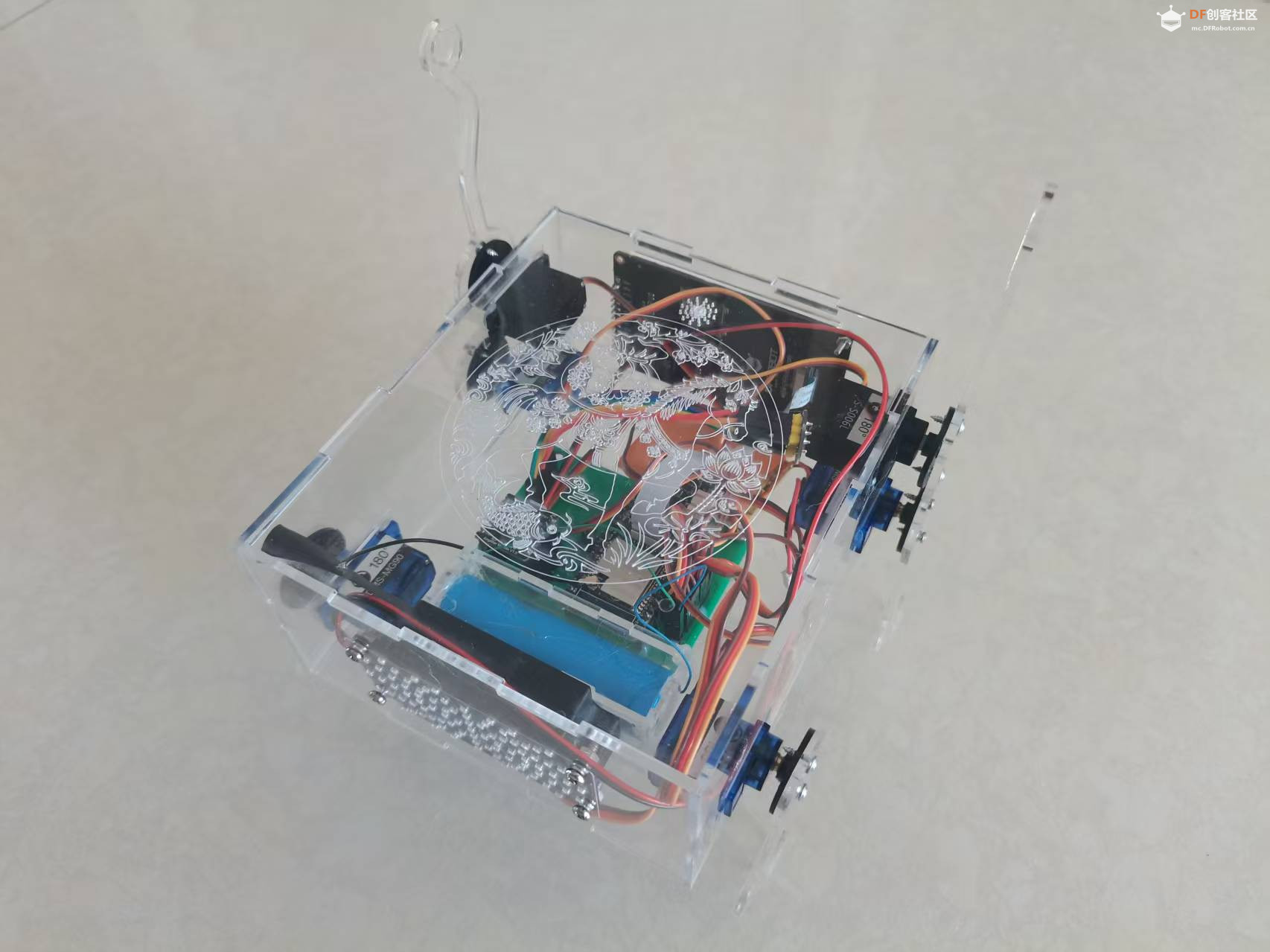 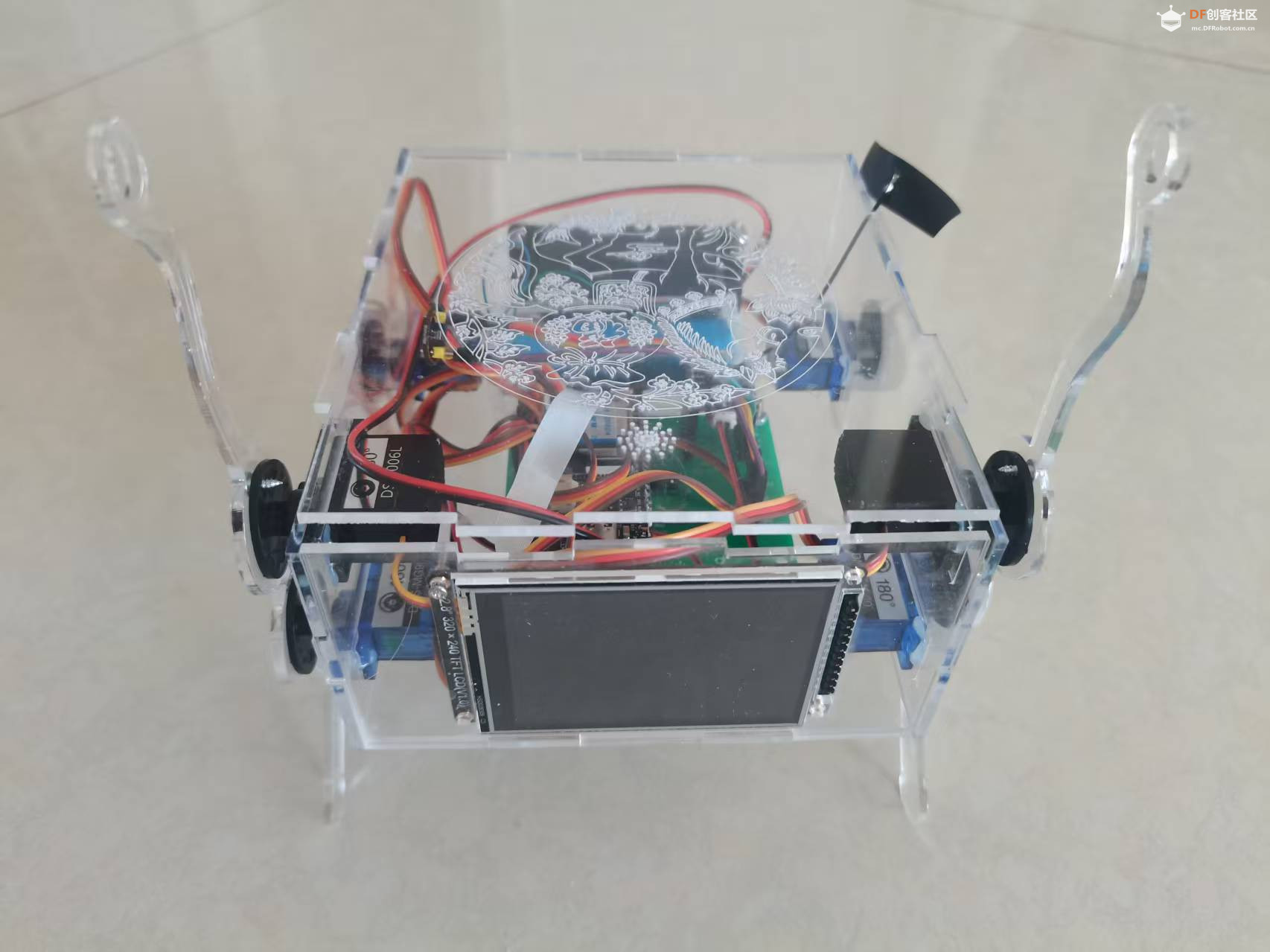  【软件修改与代码解析】 1. 添加舵机控制类 为了使AI能控制舵机,我编写了 `ServoController` 类,封装了PWM输出、角度转换、平滑运动、扫描等功能。核心代码位于 `servo_controller.cpp` 和 `servo_controller.h`。 关键方法: `SetAngle(int angle)`:直接设置舵机角度(0~180) `RotateClockwise(int degrees)`:顺时针旋转指定角度 `SweepBetween(int min, int max, int speed)`:在区间内往复扫描 使用FreeRTOS任务处理命令队列,保证运动不阻塞主循环 2. 自定义板级文件 小智AI支持多款开发板,我需要为FireBeetle ESP32-S3 + 屏幕 + 舵机创建新的板级配置。在 `boards/` 目录下 `bread-compact-wifi-lcd` 文件夹,包含 `compact_wifi_board_lcd.cc` 和 `config.h`。 在 `compact_wifi_board_lcd.cc` 中: 继承 `WifiBoard` 类,重写 `InitializeSpi()`、`InitializeLcdDisplay()` 等函数以适配ILI9341屏幕。 在 `InitializeServoController()` 中创建六个舵机控制器实例,分配不同的LEDC通道。 在 `InitializeTools()` 中通过MCP Server注册一系列舵机动作工具,让AI可以调用。例如: 这样,AI在对话中理解到“向前走三步”时,就会调用该工具,执行定义好的步态函数。 3. 步态设计 参考四足机器人的常见步态,我实现了对角线交替步态,确保机器人在运动中的稳定性。以 `WalkForward` 为例: 由于机械安装差异,你可能需要微调角度正负和基准值(如85/95/100),确保四条腿能平稳交替。 【屏幕显示】 通过 `esp_lcd` 驱动ILI9341,小智AI原生的UI会自动显示在屏幕上,包括表情、对话文字、WiFi状态等。我在 `config.h` 中正确配置了分辨率、镜像、颜色顺序等参数。 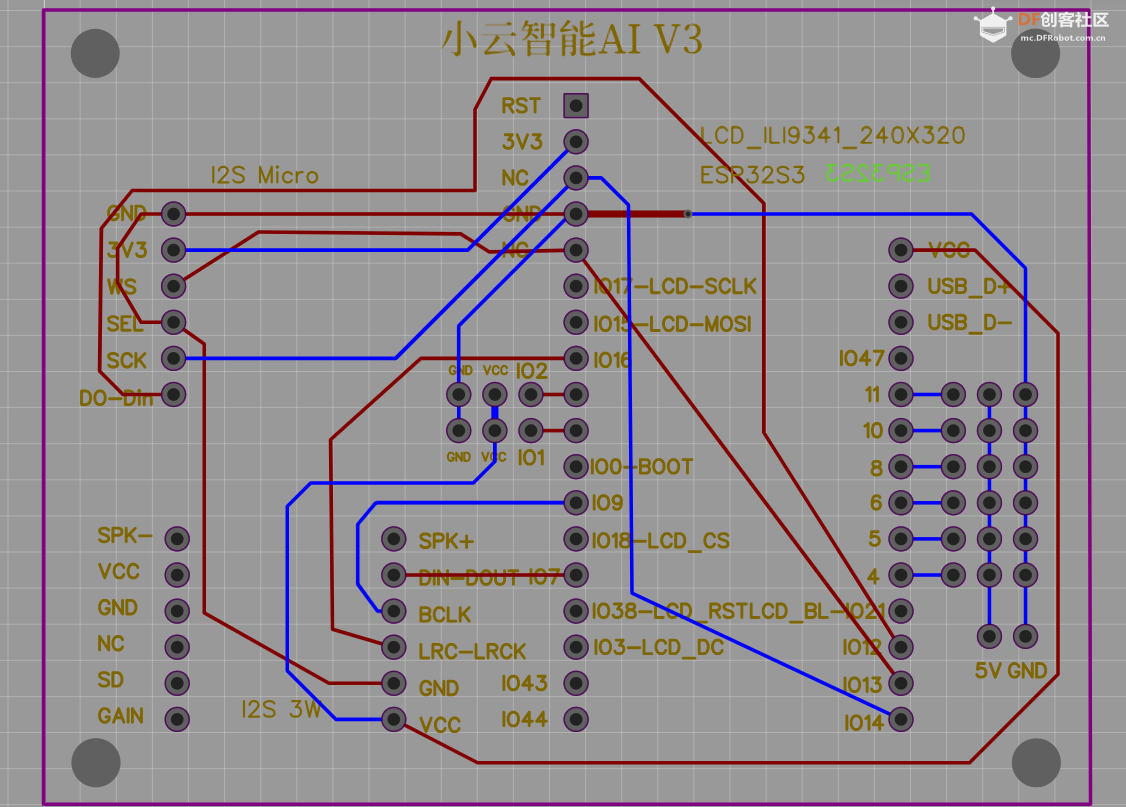 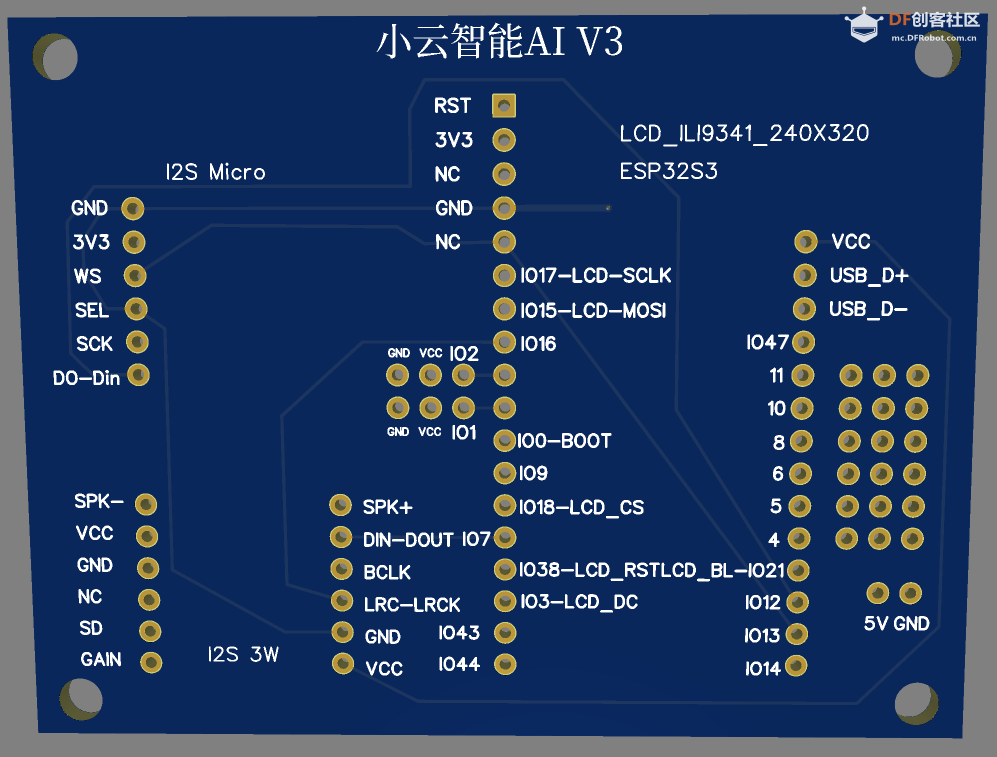 【编译过程】 1. **焊接/连接硬件**:按照引脚表连接所有模块。建议先用面包板测试,确认每个舵机、屏幕、音频都能正常工作。 2. **编写配置文件**:将上述 `config.h` 和 `compact_wifi_board_lcd.cc`修改后 放入 `boards/bread-compact-wifi-lcd/` 目录。 3. **编译固件**: 在menuconfig中,选择“Board Type”为“Bread Compact WiFI + LCD”,LCD Type选择“ILI9341 240*320”。保存退出。 4. 测试:首次烧录后,手机连接小智AI的WiFi热点进行配网(xiaozhi.me教程)。然后对着麦克风说“你好”,机器人应该会动耳朵回应,屏幕显示表情。尝试说“站起来”、“向前走两步”、“招招手”等,观察动作是否符合预期。如有偏差,调整步态函数中的角度和延迟。 【使用效果】 (面包板测试) (PCB电路板、亚克力外壳) 经过调试,我的四足机器人已经能稳定完成以下动作: 基本姿态:站立、坐下、趴下 移动:前进、后退、左转、右转(可指定步数和幅度) 交互动作:招手(右前腿)、动耳朵(左右耳独立摆动)、点头(身体前倾) 复合动作:开心招手(先动耳朵再招手)、回答问题时轻微动耳朵 AI还能根据对话内容主动调用动作,比如当它被夸奖时,会开心地摇耳朵;当它需要思考时,会微微点头。屏幕上的表情也随之变化,整个互动过程非常生动。 【总结与展望】 本项目成功为小智AI开源项目增加了物理实体,让它从单纯的语音助手变成了一个有表情、能行动的机器人伙伴。通过自定义板级文件和舵机控制类,我们不仅驱动了2.8寸大屏,还实现了多路舵机的精准控制,且不干扰原有的音频和网络功能。 未来可以做的改进: 增加更多传感器,如超声波避障、陀螺仪姿态稳定。 优化步态,实现更流畅的行走和转向。 添加触摸屏交互,直接点击屏幕触发动作。 通过WiFi远程控制,让机器人成为家庭监控小助手。 如果你也对让AI拥有“身体”感兴趣,不妨试试这个项目,让你的小智AI动起来!有任何问题欢迎在社区交流。 【附件】 完整代码已打包,可下载参考。  bread-compact-wifi-lcd.zip bread-compact-wifi-lcd.zip |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






