|
1580| 0
|
试用RainbowLink V2 USB协议转换器调试毫米波雷达传感器 |

|
本帖最后由 云天 于 2026-2-27 23:24 编辑 非常感谢DFRobot提供的试用机会,让我有机会深度体验这款RainbowLink V2 USB协议转换器。 简单来说,这是一个很实用的桌面工具。它把1路隔离RS485、1路隔离RS232和2路TTL共四个独立通道集成在一个小盒子里,还能直接从USB输出12V、5V和3.3V给外部设备供电,并且用了杠杆式快接端子,接线不用螺丝刀。 接下来的试用,我主要会从四个方面入手:
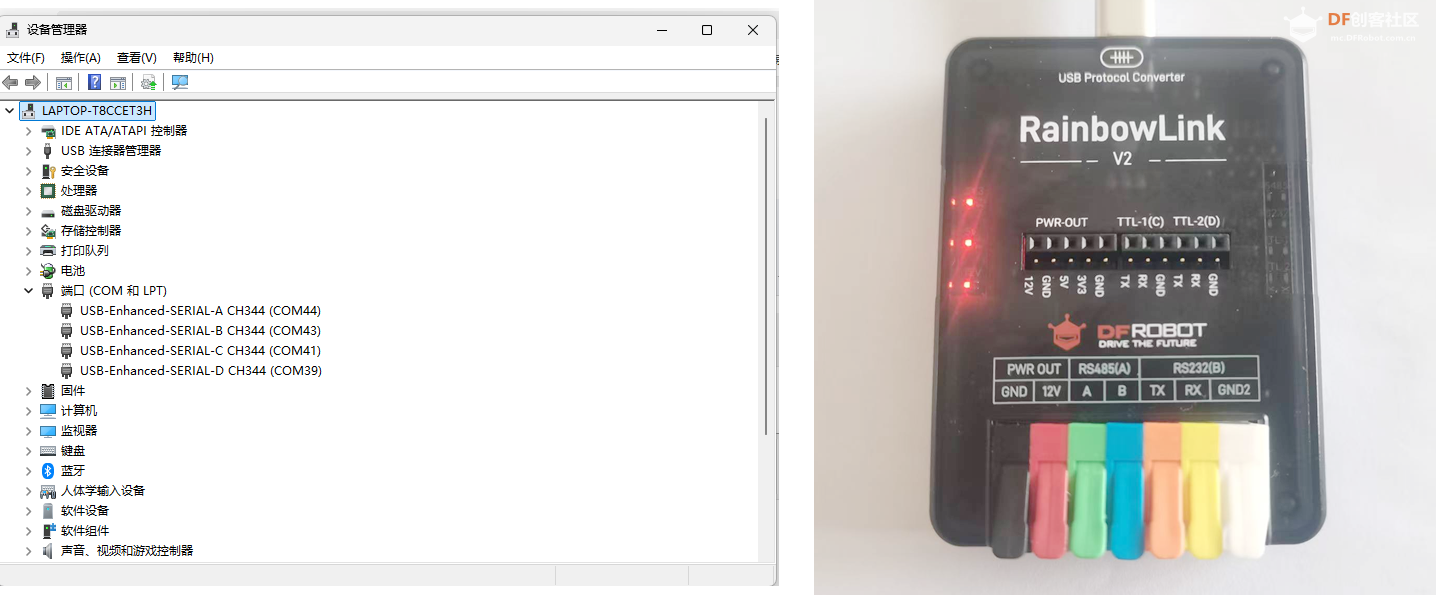
这是确认设备本身没坏、电脑能识别的最基本步骤。 1.连接电脑:用包装里的USB线将RainbowLink连接到电脑的USB口(建议用USB 3.0或Type-C口以保证供电充足。2.观察指示灯:连接后,设备上的电源指示灯应该亮起。如果有数据指示灯在闪烁,也是正常的。 3.检查电脑识别(免驱体验):
 第二阶段:核心功能自测试 这部分测试主要验证各个通信接口的发送和接收是否正常。 1. TTL通道自收发测试(最简单,只需一根杜邦线) TTL通道是测试门槛最低的,可以用来验证最基本的串口通信功能。 1)硬件:准备一根杜邦线(或任何导线)。2)连接:找到RainbowLink的 TTL-1(C) 通道接口(通常是排针)。用杜邦线将它的 TX(发送) 和 RX(接收) 两个引脚短接在一起。 3)软件:打开任意串口调试助手软件(如 SSCOM、Putty),我使用的是Arduino ide 串口监视器。
5)重复:用同样的方法测试 TTL-B 通道。 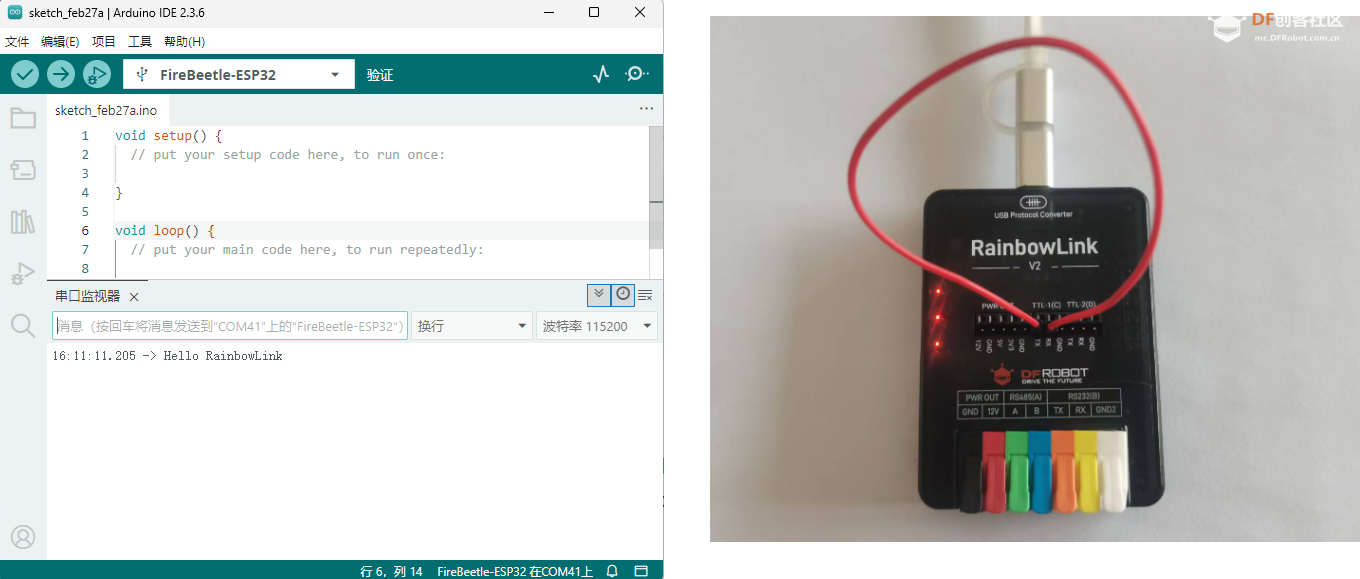 2. RS485通道测试(需要另一个USB转485模块) RS485是差分信号,不能直接短接TX和RX,需要两个设备“对话”。 1)硬件:你需要另一个 USB 转 RS485 模块(https://www.dfrobot.com.cn/goods-3123.html)。 2)连接:
3)软件:
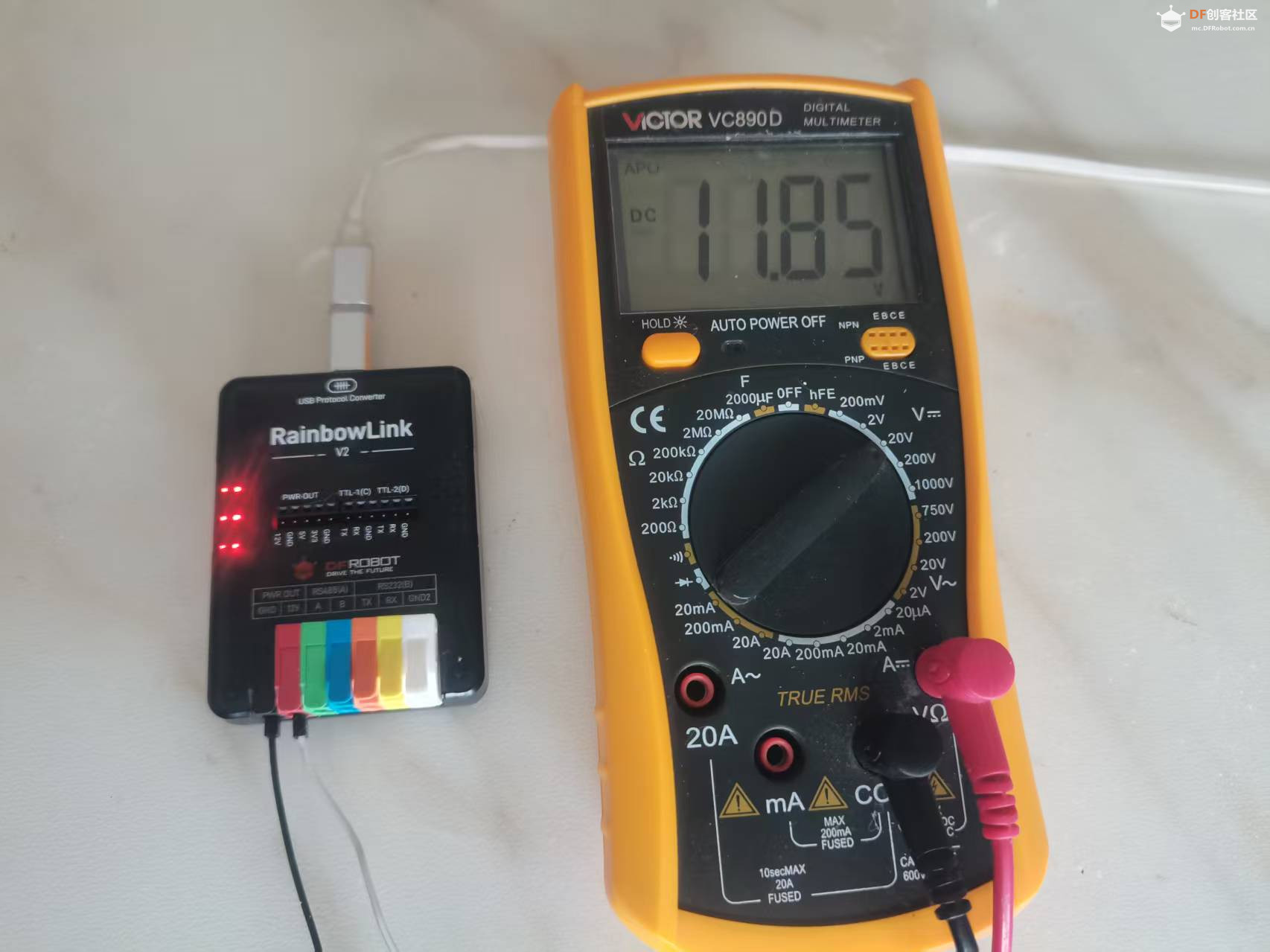
5)进阶:如果想测试RS485的工业标准Modbus协议,可以用 Modbus Slave 和 Modbus Poll 这两个软件来分别模拟从站和主站,进行更专业的数据包测试。 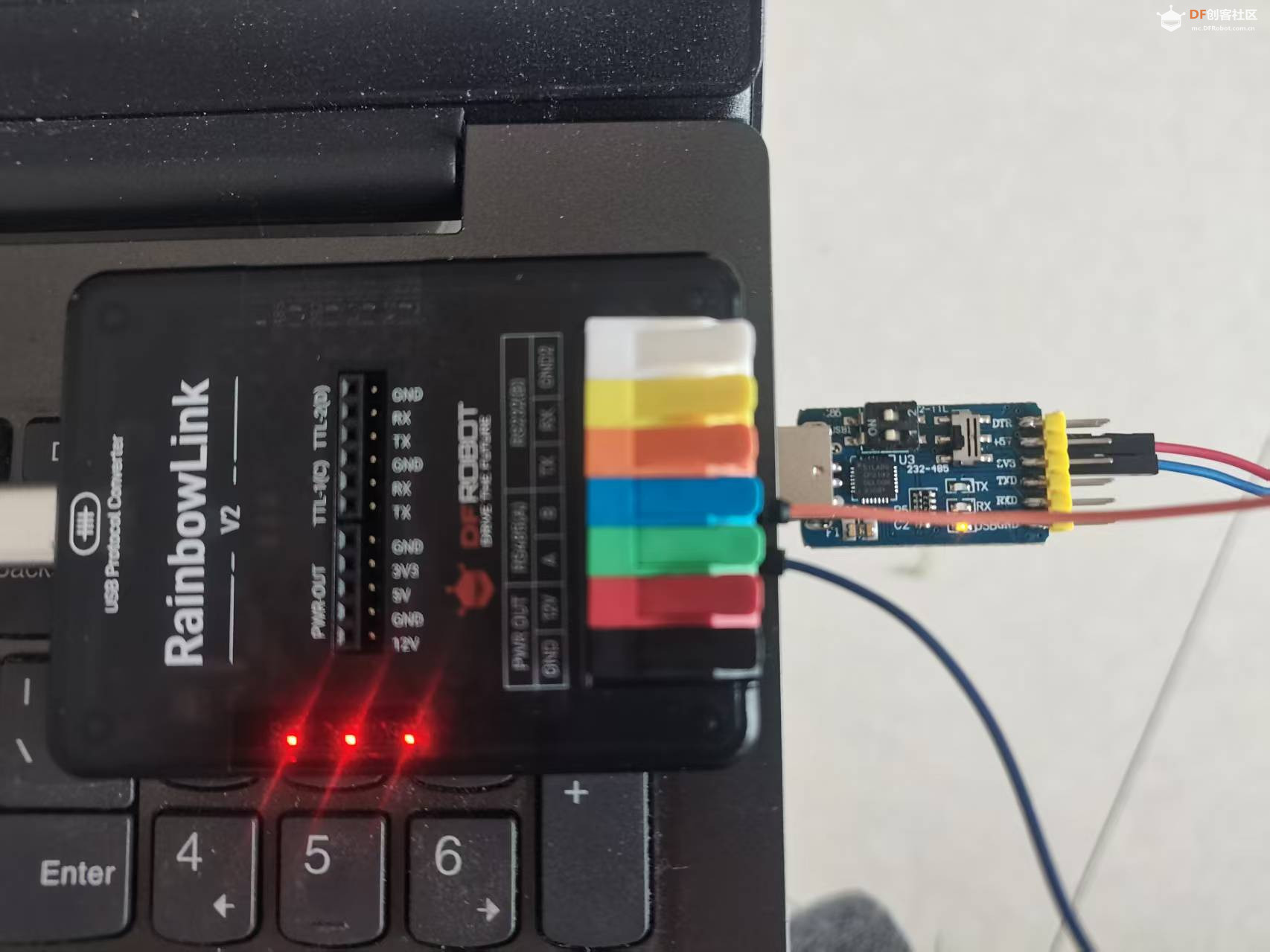  6合1多功能串口转换器 是一款支持USB-TTL,USB-232,USB-485,TTL-232,TTL-485,232-485的多功能串口转换模块,使用USB-485功能。 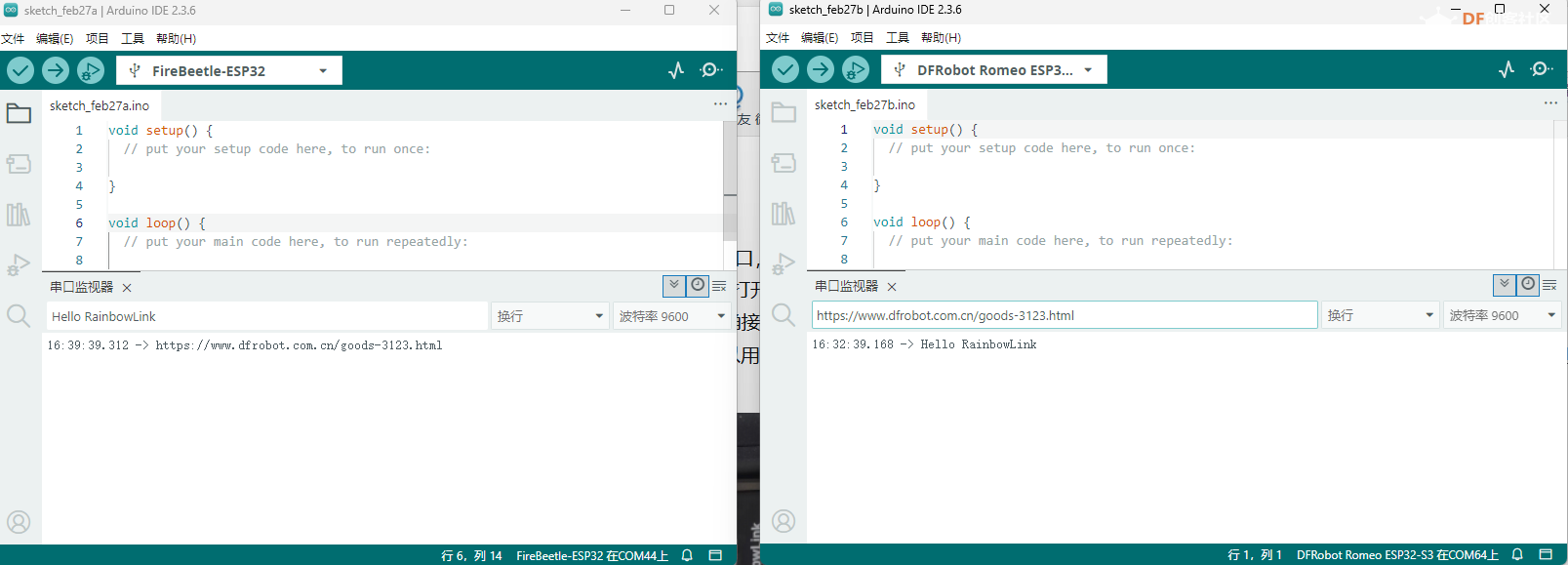 第三阶段:电源输出能力测试(验证供电功能) 这个测试验证RainbowLink的核心功能之一:对外供电。 1.准备工具:你需要一个 万用表,如果手头有 电子负载 会更好,没有的话用一些小功率的12V/5V/3.3V设备(如风扇、LED灯、开发板)也行。 2.测试12V输出:
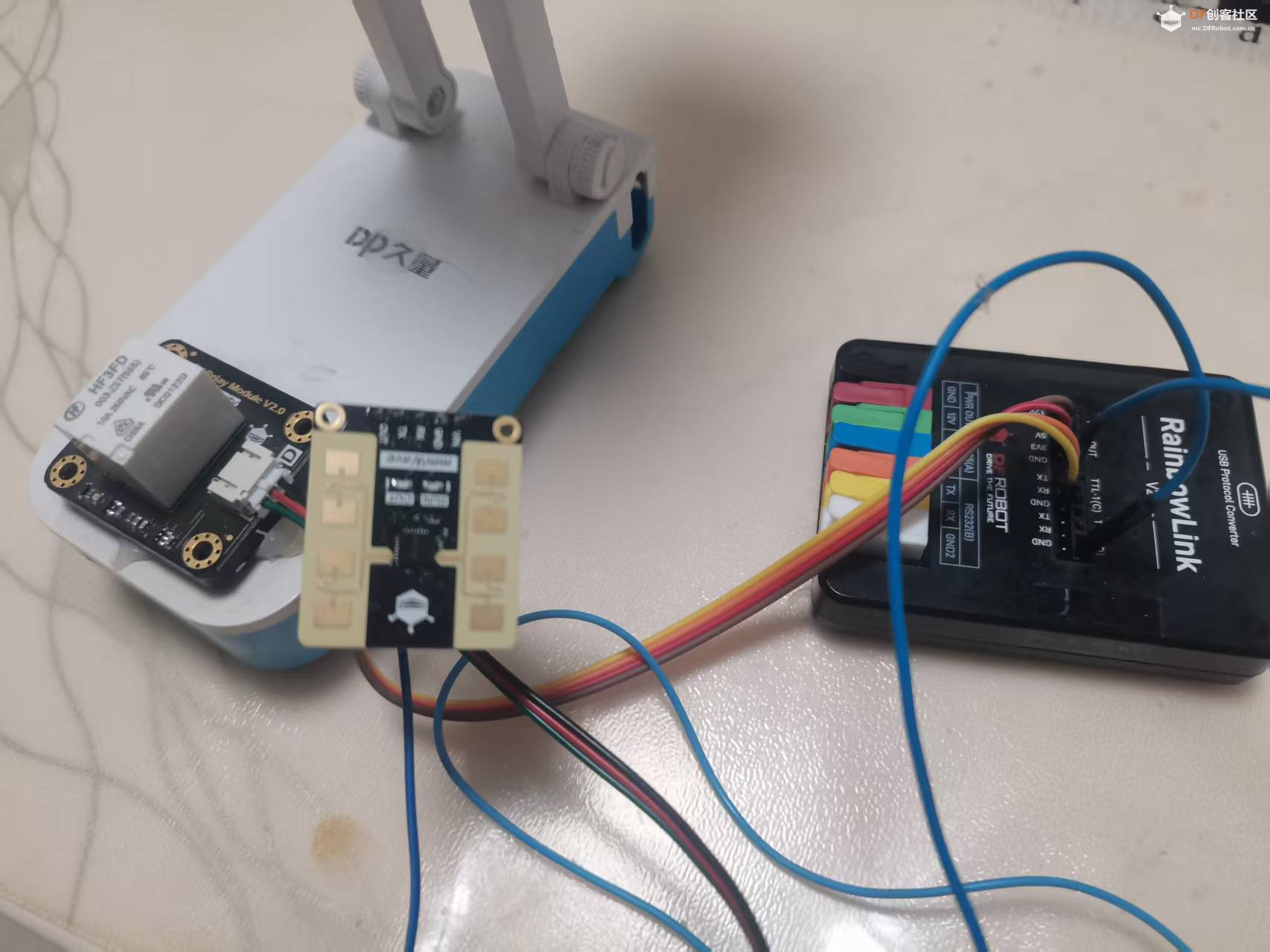
 (笔记本USB口供电) 第四阶段:调试毫米波雷达传感器DFRobot C4001 24GHz毫米波存在传感器,是一个非常典型的 UART(串口)接口的主动型传感器,一款能感知人体存在和运动的“高级雷达眼”。跟传统红外传感器不同,它不受温度、光线、气流干扰,能检测到静止不动的人。 核心亮点
第一步:硬件连接与准备
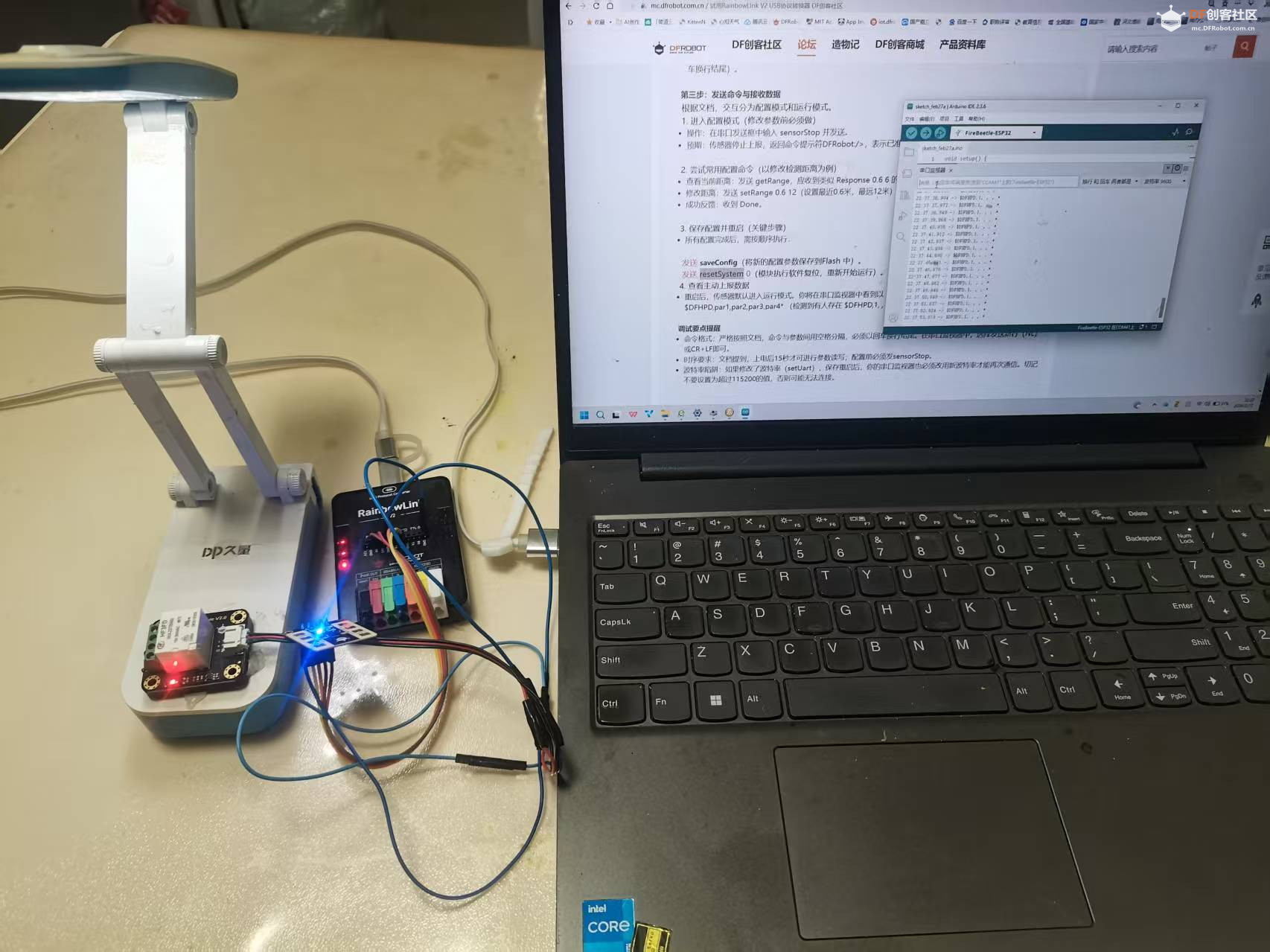
根据文档,交互分为配置模式和运行模式。 1. 进入配置模式(修改参数前必须做) 操作:在串口发送框中输入 sensorStop 并发送。预期:传感器停止上报,返回命令提示符DFRobot:/>,表示已准备好接收配置命令。 2. 尝试常用配置命令(以修改检测距离为例) 查看当前距离:发送 getRange,应收到类似 Response 0.6 6 的回复。修改距离:发送 setRange 0.6 12(设置最近0.6米,最远12米)。 成功反馈:收到 Done。 3. 保存配置并重启(关键步骤) 所有配置完成后,需按顺序执行:发送 saveConfig(将新的配置参数保存到Flash 中)。 发送 resetSystem(模块执行软件复位,重新开始运行)。 4. 查看主动上报数据 重启后,传感器默认进入运行模式。你将在串口监视器中看到以 $ 开头、以 * 结尾的ASCII数据帧,例如:$DFHPD,par1,par2,par3,par4* (检测到有人存在 $DFHPD,1, , , *)。 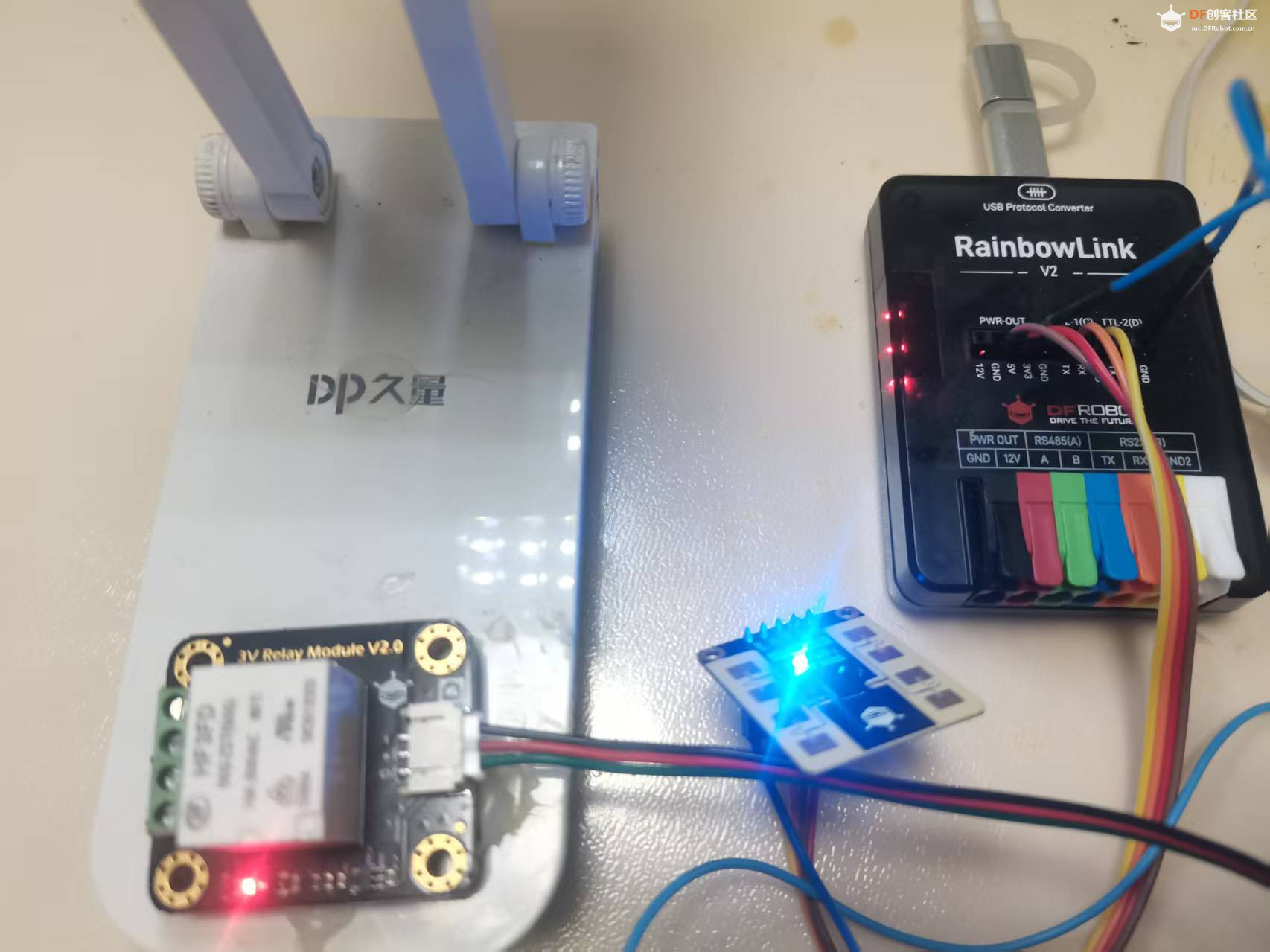 调试要点提醒
|



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






