|
1402| 0
|
试用RainbowLink V2:一盒搞定二哈2的供电与通信 |

|
本帖最后由 云天 于 2026-3-7 18:41 编辑 RainbowLink V2:一盒搞定二哈2的供电与通信,让桌面告别“蜘蛛网” 关键词:USB协议转换器、TTL串口、二哈2供电、Python控制、隔离保护 【这个小方盒,野心不小】 最近,我有幸拿到了DFRobot最新推出的RainbowLink V2(SKU:TEL0190)——一款集多种通讯协议与可调电源输出于一体的USB协议转换器。它不仅在单个小巧的盒子里集成了全隔离的RS485、RS232以及两路TTL接口,还能同时输出12V、5V和3.3V电压,为各类工农业传感器提供稳定供电。我手上恰好有一块HuskyLens 2(二哈2) 视觉传感器,它工作时对供电稳定性要求较高,且通常需要同时连接串口和电源,导致桌面线缆繁杂。这次,我打算用RainbowLink V2来驱动二哈2,看看它是否真能以一己之力简化硬件连接,实现无需额外主控板,仅通过笔记本电脑的串口直接读取传感器数据,从而验证其在实际项目中的实用价值。 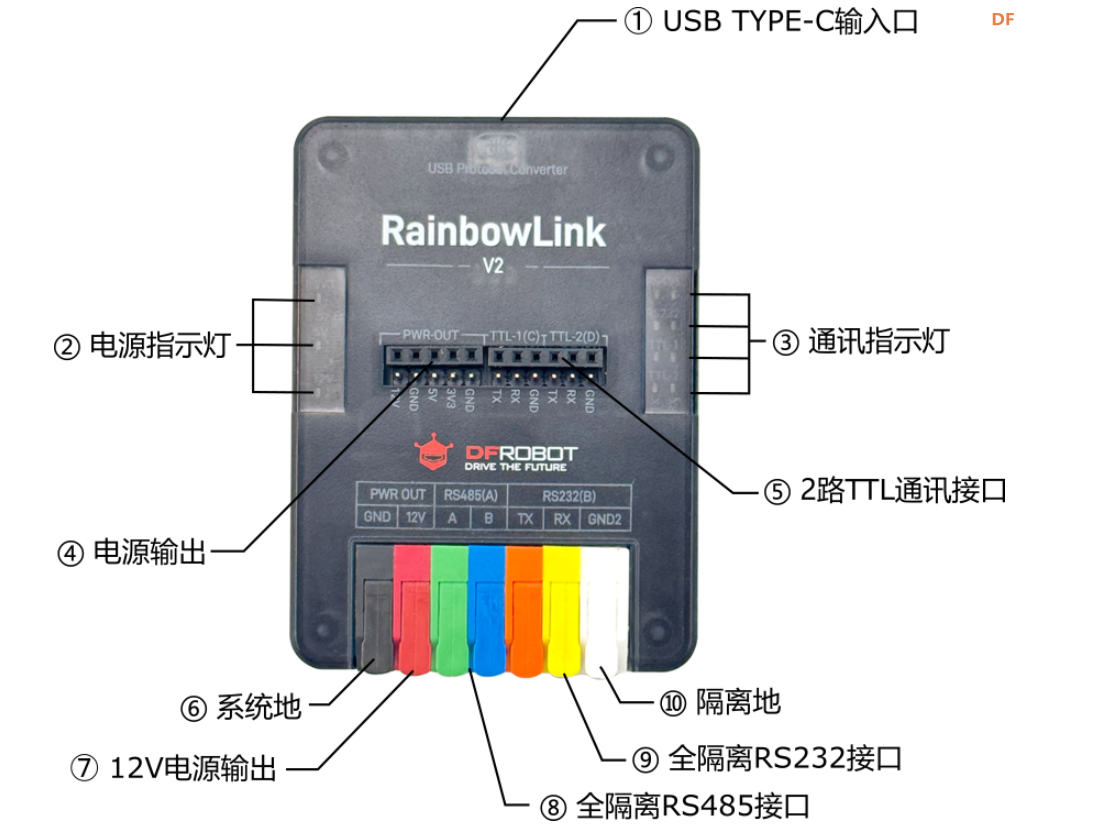 测试目标:
硬件连接 以往调试二哈2功能时,需要一块主控板,如果不使用扩展板或扩展板无5V供电,都需要单独的电源线(负责为二哈2单独供电),桌面总是乱糟糟。而RainbowLink V2的出现,让这一切变得极其简洁:
整个连接过程不超过2分钟,得益于其双接口兼容排针排母及杠杆式快接端子,无需螺丝刀,一按一插即可,导线固定得非常牢固。  在开始编程前,请确保已安装必要的Python库。打开终端或命令提示符,执行以下命令:
这些库将分别用于串口通信、图像处理、数值计算和鼠标控制。 硬件连接好后,软件层面的开发异常顺畅。RainbowLink V2的驱动安装后,四个COM口在设备管理器中直接显示为“RainbowLink TTL1”、“RainbowLink TTL2”等,与外壳丝印完美对应,再也不用手动猜测哪个端口是哪个。接下来,我通过三个典型的视觉应用场景,全面测试了这套组合的稳定性与易用性。 第一步:获取人脸关键点数据 首先运行最基础的人脸识别程序。我使用Python的pyserial库,基于二哈2官方协议编写了驱动类HuskylensV2_Serial,它负责通过RainbowLink V2的TTL1通道与二哈2通信。关键代码非常简单:#!/usr/bin/env python3 # -*- coding: utf-8 -*- """ 使用笔记本电脑串口驱动二哈2视觉传感器(HuskyLens V2) 基于 pyserial 实现,无需主控板和 PinPong 库。 """ import time import logging import queue import serial import serial.tools.list_ports # 导入原协议类及常量(请确保 dfrobot_huskylensv2.py 在同一目录下) from dfrobot_huskylensv2 import HuskylensV2, ALGORITHM_FACE_RECOGNITION class HuskylensV2_Serial(HuskylensV2): """ 使用 pyserial 实现的 Huskylens V2 串口驱动类。 继承原协议的 HuskylensV2,只重写底层读写方法。 """ def __init__(self, port=None, baudrate=115200, timeout=1, debug_level=logging.INFO): """ :param port: 串口号,如 'COM3' 或 '/dev/ttyUSB0'。若为 None 则自动检测(不保证准确)。 :param baudrate: 波特率,二哈2默认为115200。 :param timeout: 读取超时时间(秒)。 :param debug_level: 日志级别(如 logging.DEBUG, logging.INFO)。 """ logging.getLogger().setLevel(debug_level) self.ser = None self.port = port self.baudrate = baudrate self.timeout = timeout self.q = queue.Queue() # 接收字节缓存队列 super().__init__() # 初始化父类协议部分 self._connect_serial() def _connect_serial(self): """打开串口连接""" if self.port is None: # 自动检测可用串口(可能不准确,建议手动指定) ports = serial.tools.list_ports.comports() for p in ports: if 'USB' in p.description or 'UART' in p.description: self.port = p.device break if self.port is None: raise IOError("未找到可用串口,请手动指定 port 参数") try: self.ser = serial.Serial(self.port, self.baudrate, timeout=self.timeout) logging.info(f"已打开串口 {self.port}") except Exception as e: raise IOError(f"无法打开串口 {self.port}: {e}") def _write_to_huskyLens(self): """发送数据到二哈2(重写父类方法)""" if not self.ser or not self.ser.is_open: raise IOError("串口未打开") command = self.send_buffer[0:self.send_index] # 父类生成的发送缓冲区 logging.debug("_write_to_huskyLens ----->") self.print_hex(command) # 打印十六进制(调试用) self.ser.write(command) time.sleep(0.1) # 给传感器一点处理时间 def _read_from_huskyLens(self): """从二哈2读取一个字节(非阻塞,从队列中取)""" if not self.ser or not self.ser.is_open: raise IOError("串口未打开") # 如果队列为空,则尝试从串口读取最多64字节并放入队列 if self.q.empty(): data = self.ser.read(64) # 非阻塞,因为有 timeout 设置 for b in data: self.q.put(b) # 从队列中取出一个字节,若无则返回 None try: return self.q.get_nowait() except queue.Empty: return None def close(self): """关闭串口""" if self.ser and self.ser.is_open: self.ser.close() logging.info("串口已关闭") def __del__(self): self.close() # ==================== 主程序示例 ==================== if __name__ == "__main__": # 请根据实际情况修改串口号 SERIAL_PORT = "COM41" # Windows 示例 # SERIAL_PORT = "/dev/ttyUSB0" # Linux 示例 # SERIAL_PORT = "/dev/cu.usbserial-1420" # macOS 示例 BAUDRATE = 9600 # 初始化传感器 hl = HuskylensV2_Serial(port=SERIAL_PORT, baudrate=BAUDRATE, debug_level=logging.INFO) # 握手测试 if not hl.begin(): print("连接失败,请检查接线和端口") exit() print("连接成功!") # 切换至人脸识别算法(可改为其他算法,如 ALGORITHM_OBJECT_TRACKING 等) if hl.switchAlgorithm(ALGORITHM_FACE_RECOGNITION): print("已切换至人脸识别") else: print("算法切换失败") exit() # 主循环:持续获取识别结果 try: while True: total = hl.getResult(ALGORITHM_FACE_RECOGNITION) if total is None: print("获取结果超时") continue # 遍历所有检测到的目标 for i in range(total): obj = hl.getCachedResultByIndex(ALGORITHM_FACE_RECOGNITION, i) if obj: # 基础信息 print(f"ID: {obj.ID}, 中心: ({obj.xCenter}, {obj.yCenter}), " f"尺寸: {obj.width}x{obj.height}, 置信度: {obj.confidence}") # 如果是人脸识别,还可以输出关键点(FaceResult 特有属性) if hasattr(obj, 'leye_x'): print(f" 左眼: ({obj.leye_x}, {obj.leye_y}), " f"右眼: ({obj.reye_x}, {obj.reye_y}), " f"鼻子: ({obj.nose_x}, {obj.nose_y})") time.sleep(0.5) except KeyboardInterrupt: print("用户中断,退出程序") finally: hl.close() 程序运行后,二哈2开始稳定返回人脸数据,即使快速移动头部,数据流也未出现卡顿或丢失。这得益于RainbowLink V2稳定的TTL信号和独立的5V供电——二哈2的电源完全由RainbowLink V2的5V输出口提供,无需外接电池,整个系统仅通过一根Type-C线就完成了供电和数据传输,桌面干净利落。 第二步:实时绘制人脸形象 有了数据,就可以发挥OpenCV的威力了。我编写了一个draw_fancy_face函数,利用二哈2返回的双眼、鼻子、嘴角等关键点,在画布上绘制出更生动的人脸:眼睛用带瞳孔的圆表示,鼻子用菱形,嘴巴则根据嘴角位置画出一条微笑的弧线。代码中只需将第一步获取的FaceResult对象传入绘图函数即可。 import cv2import numpy as np def draw_fancy_face(img, face): # 绘制眼睛(带高光) cv2.circle(img, (face.leye_x, face.leye_y), 6, (255,255,255), -1) cv2.circle(img, (face.leye_x, face.leye_y), 2, (0,0,0), -1) # ... 绘制鼻子、嘴巴等(省略细节) while True: total = hl.getResult(ALGORITHM_FACE_RECOGNITION) img = np.zeros((480,640,3), dtype=np.uint8) for i in range(total): face = hl.getCachedResultByIndex(ALGORITHM_FACE_RECOGNITION, i) draw_fancy_face(img, face) cv2.imshow("Face", img) cv2.waitKey(10) 实际运行时,OpenCV窗口以30fps左右实时刷新,绘制的人脸轮廓与真实手部动作几乎同步。RainbowLink V2的低延迟通信让这种实时交互成为可能,而稳定的5V供电确保了二哈2在全速运算时不会掉帧。 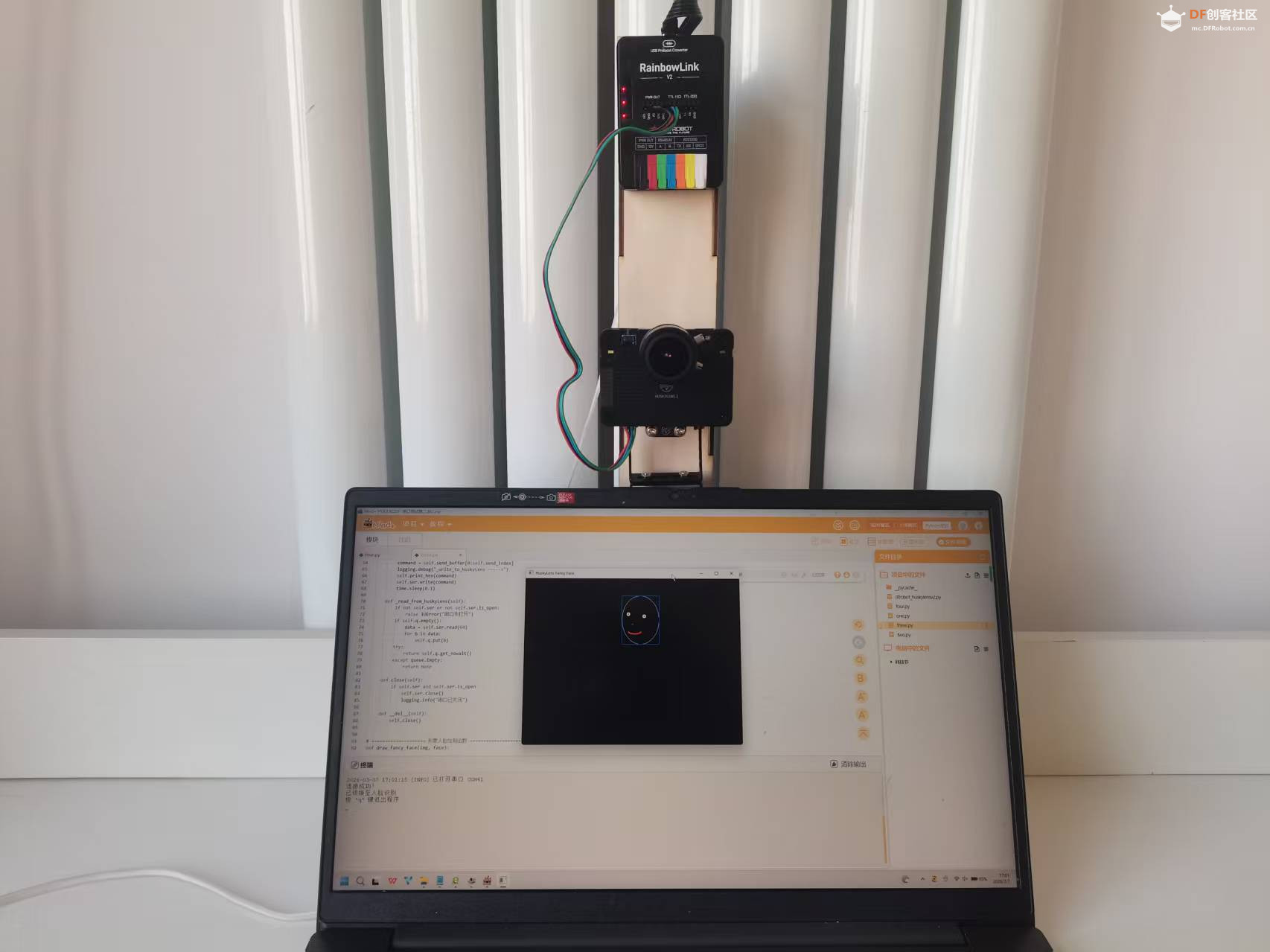 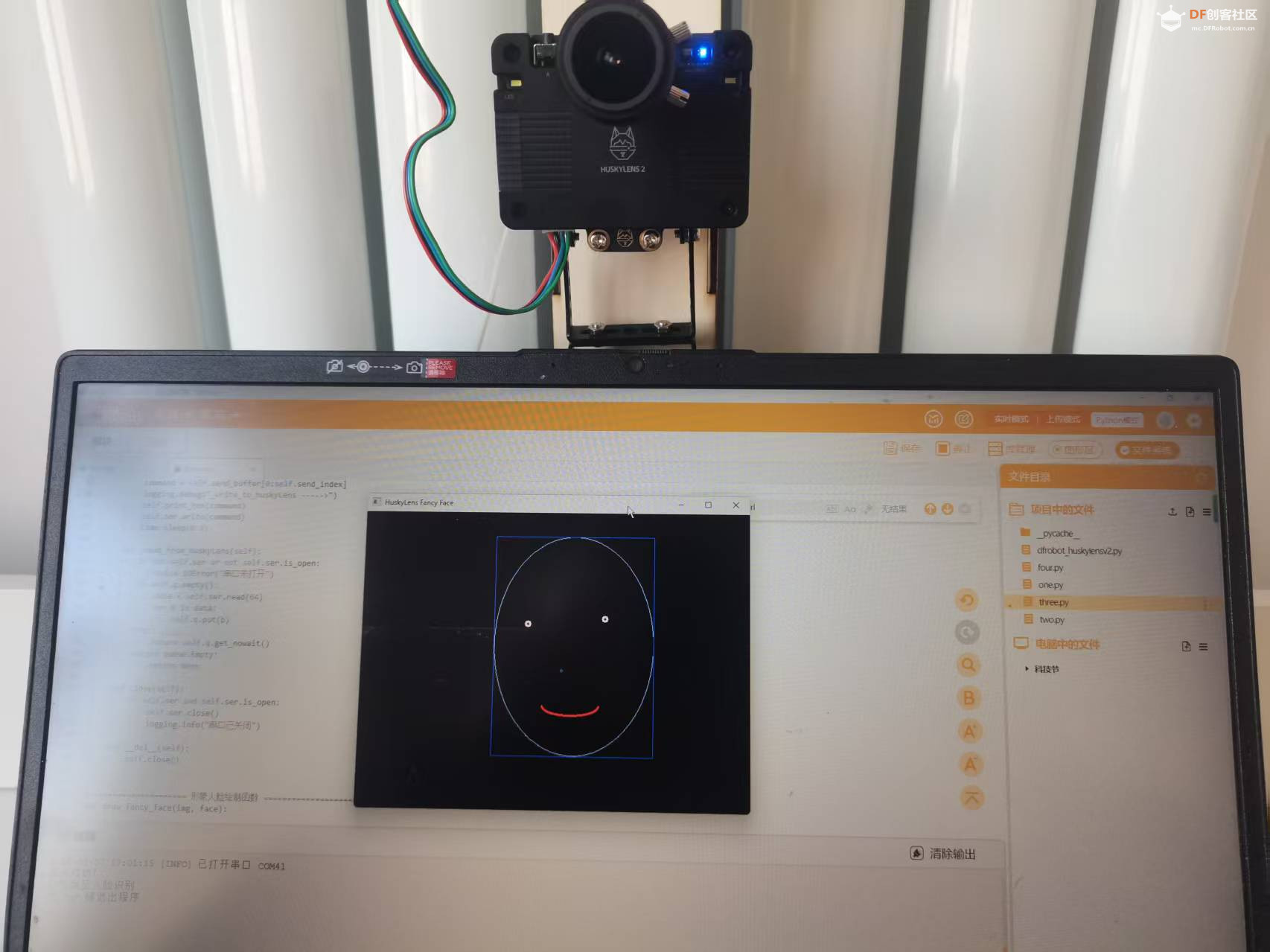 第三步:手势控制电脑鼠标 最激动人心的环节到了——用手势控制电脑。切换到二哈2的手部识别算法后,程序会获取21个手部关键点,并实时计算拇指尖与食指尖的距离。当两指张开时,指尖中心点的位置被映射到屏幕坐标,通过平滑算法驱动鼠标移动;当两指快速捏合时,则触发单击或双击操作。 # 初始化手势控制器(开启左右镜像,使操作更自然) gesture = HandGestureControl(mirror_x=True) while True: total = hl.getResult(ALGORITHM_HAND_RECOGNITION) for i in range(total): hand = hl.getCachedResultByIndex(ALGORITHM_HAND_RECOGNITION, i) ret = gesture.process_hand(hand) # 内部自动移动鼠标和检测点击 if ret: distance, pinched = ret # 在窗口上显示距离和捏合状态 # 绘制手部骨架并显示 cv2.imshow("Hand Control", img) if cv2.waitKey(10) & 0xFF == ord('q'): break 得益于RainbowLink V2提供的稳定供电和干净信号,整个手势控制过程非常流畅。鼠标指针的移动与手部动作对应,捏合触发的单击。经过半小时连续运行,二哈2未出现任何通信中断现象,RainbowLink V2的5V输出口满足了二哈2的供电需求。 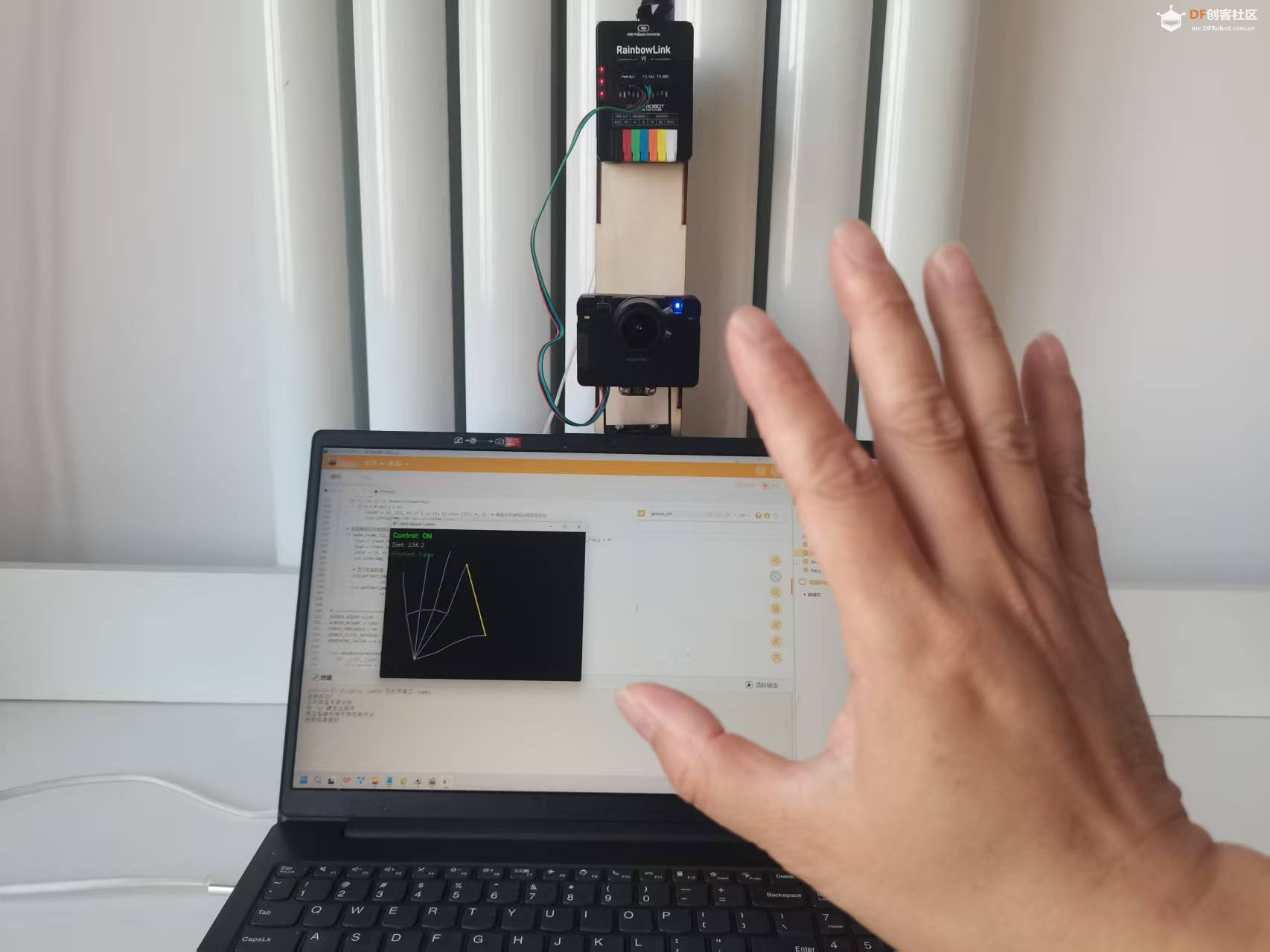 【演示视频】 【测试中的闪光点与思考】
如果你也受够了桌面上杂乱无章的USB线和电源适配器,或者正在寻找一个能安全、稳定驱动如二哈2这类“用电大户”传感器的工具,RainbowLink V2绝对值得一试。它用实力证明,专业和整洁可以兼得。 【项目附件】 附件中包括,测试过程所有python文件及二哈2python驱动库dfrobot_huskylensv2.py |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






