本帖最后由 云天 于 2026-3-4 22:25 编辑
让你的小车拥有“眼睛”,通过旋转扫描感知四周,自主决策避开障碍。
【项目简介】
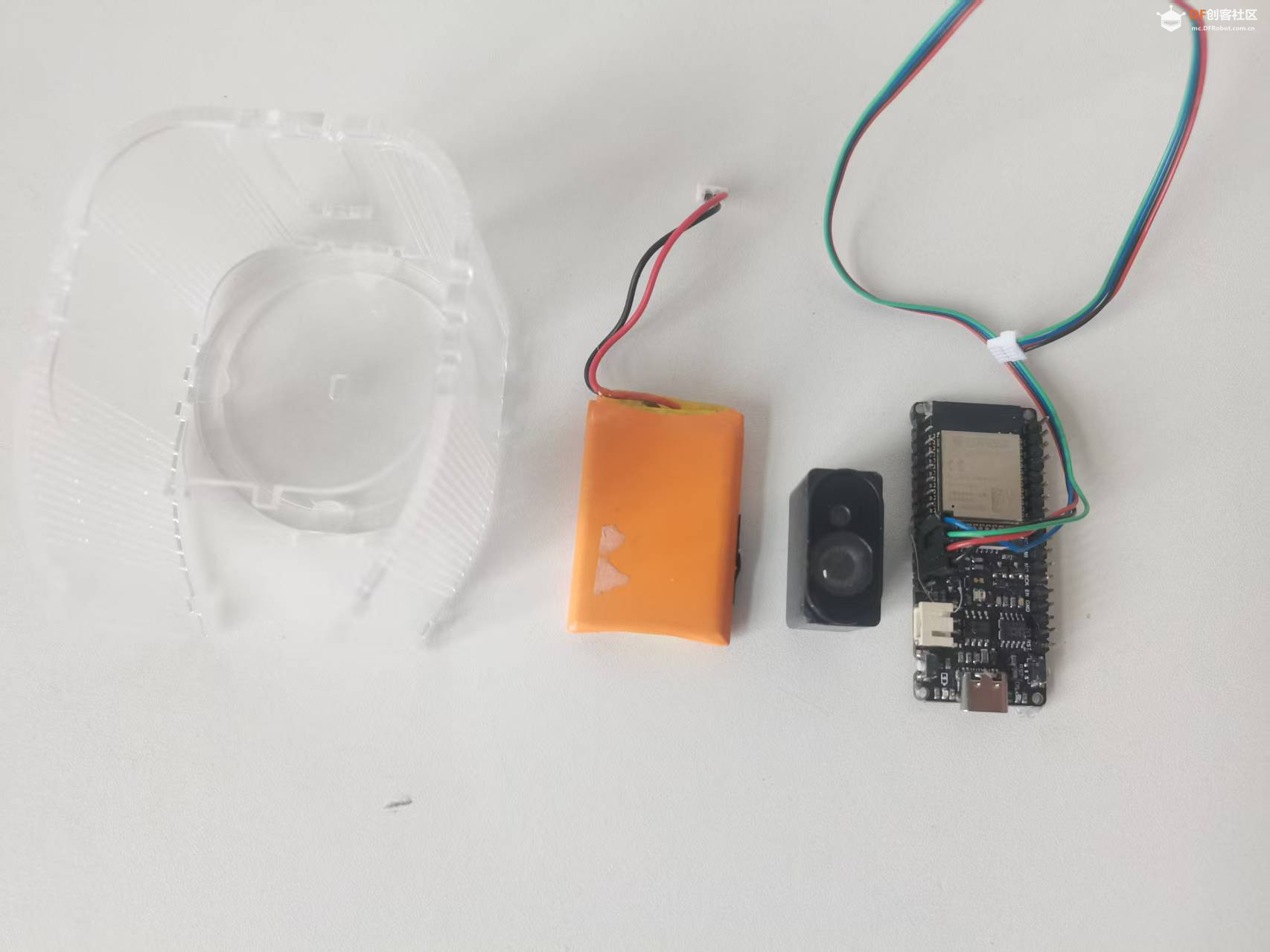
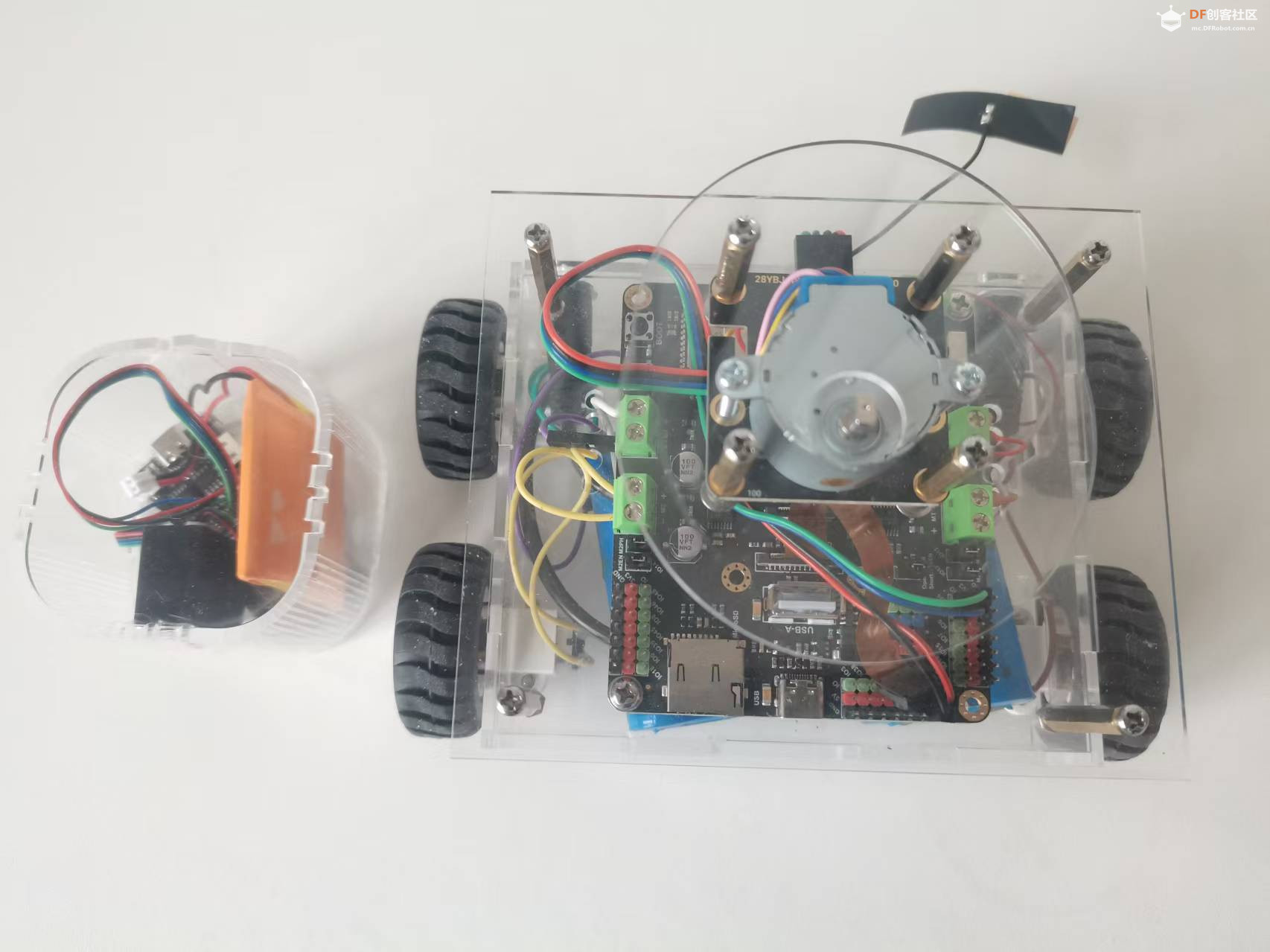
大家好!这次我制作了一台基于 “TOF激光测距传感器” 的智能避障小车。它使用两块ESP32开发板——“FireBeetle ESP32-E” 负责采集距离数据,“Romeo ESP32-S3” 负责电机控制和决策。为了让感知范围覆盖360°,我让传感器安装在28BYJ-48步进电机驱动模块上,在行进中不断旋转扫描,实时检测四个方向(前、右、后、左)的障碍距离,然后根据距离阈值自动前进、转向或后退。
【项目的亮点】
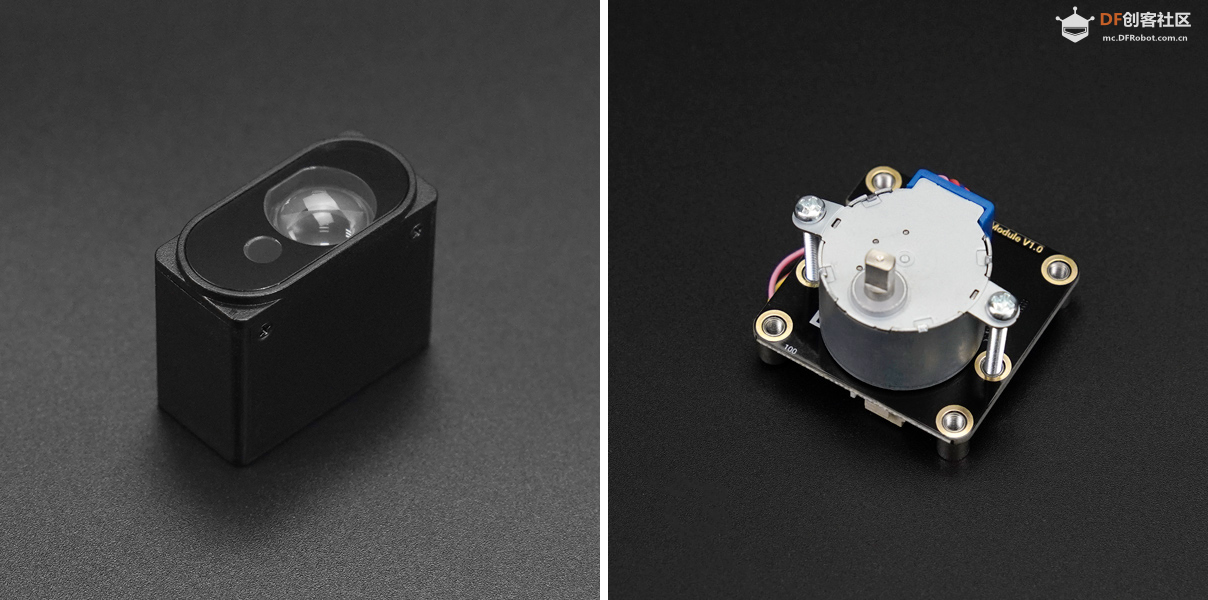
50米高精度TOF激光测距:采用新一代dTOF(直接飞行时间)技术,测距范围 0.05~50米,精度高达 ±3cm,抗环境光干扰能力达100K LUX,为小车提供精准、稳定的障碍物感知,无论室内外都能可靠工作。
无线通信:采用 **ESP-NOW** 协议,无需Wi-Fi路由器,两块ESP32直接交换数据。
持续扫描:28BYJ-48步进电机驱动模块步进电机单向旋转,每90°采集一次数据,保证数据实时更新。
可校准:上电后可通过串口命令校准车头方向,方便安装调试。
开源代码:Arduino IDE编写,注释清晰,易于二次开发。
【硬件清单】
组件 | 型号 | 数量 | 备注 | | 主控板(接收端) | Romeo ESP32-S3 (DFR0994) | 1 | 四路电机驱动、ESP32-S3核心 | | 传感器板(发送端) | FireBeetle ESP32-E | 1 | 低功耗、I2C接口 | | TOF激光测距传感器 | SEN0648 (50m) | 1 | 采用IIC模式,测距精度±3cm | | 步进电机驱动模块 | 28BYJ-48步进电机驱动模块 (DFR1199) | 1 | STEP/DIR控制,5V供电 | | 直流减速电机 | N20 微型电机 | 4 | 带轮子,用于四轮驱动 | | 电源 | 7.4V 锂电池组 | 2 | 给Romeo供电,为电机及步进电机供电 | | 车架 | 亚克力车架 | | 根据车架自行准备 |
(TOF激光测距传感器与28BYJ-48步进电机驱动模块)
“注意”:TOF传感器需预先通过上位机配置为 “IIC模式”,并记住设置的ID(假设ID=0,则IIC地址为0x08)。
【硬件接线】
FireBeetle ESP32-E ↔ TOF传感器 (SEN0648)
TOF传感器 | FireBeetle ESP32-E | | VCC (黑线) | 5V | | GND (红线) | GND | | SDA | GPIO21 | | SCL | GPIO22 |
(FireBeetle默认I2C引脚为21/22,可根据实际修改)
Romeo ESP32-S3 ↔ 步进电机驱动模块 (DFR1199)
驱动模块 | Romeo ESP32-S3 | | STEP | GPIO4 | | DIR | GPIO5 | | 5V | 5V (可从Romeo板载5V取电) | | GND | GND |
Romeo ESP32-S3 ↔ 四个N20直流电机
采用PH/EN控制模式,EN引脚输出PWM,PH引脚控制方向。参考下表(可根据实际车轮布局调整):
电机 | EN引脚 | PH引脚 | 对应车轮 | | M1 | GPIO12 | GPIO13 | 右前 | | M2 | GPIO14 | GPIO21 | 左前 | | M3 | GPIO9 | GPIO10 | 右后 | | M4 | GPIO47 | GPIO11 | 左后 |
电源连接
Romeo的 “VIN” 或 “VM” 输入7~12V(我用了7.4V锂电池)。
步进电机驱动模块的5V可从Romeo的5V输出引脚取电(注意总电流不超过2A)。
FireBeetle的5V也可从Romeo的5V输出取电,方便共地。
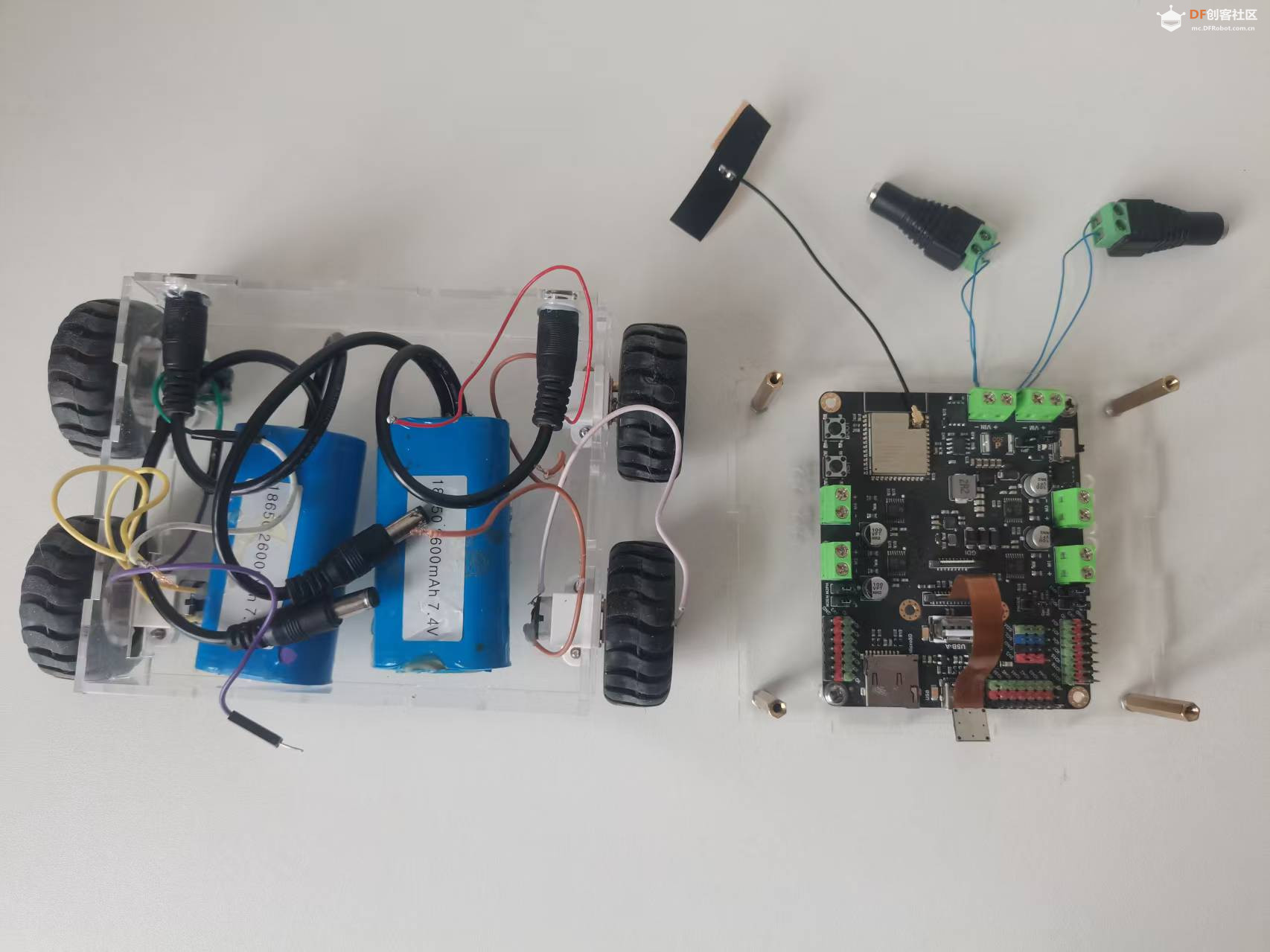
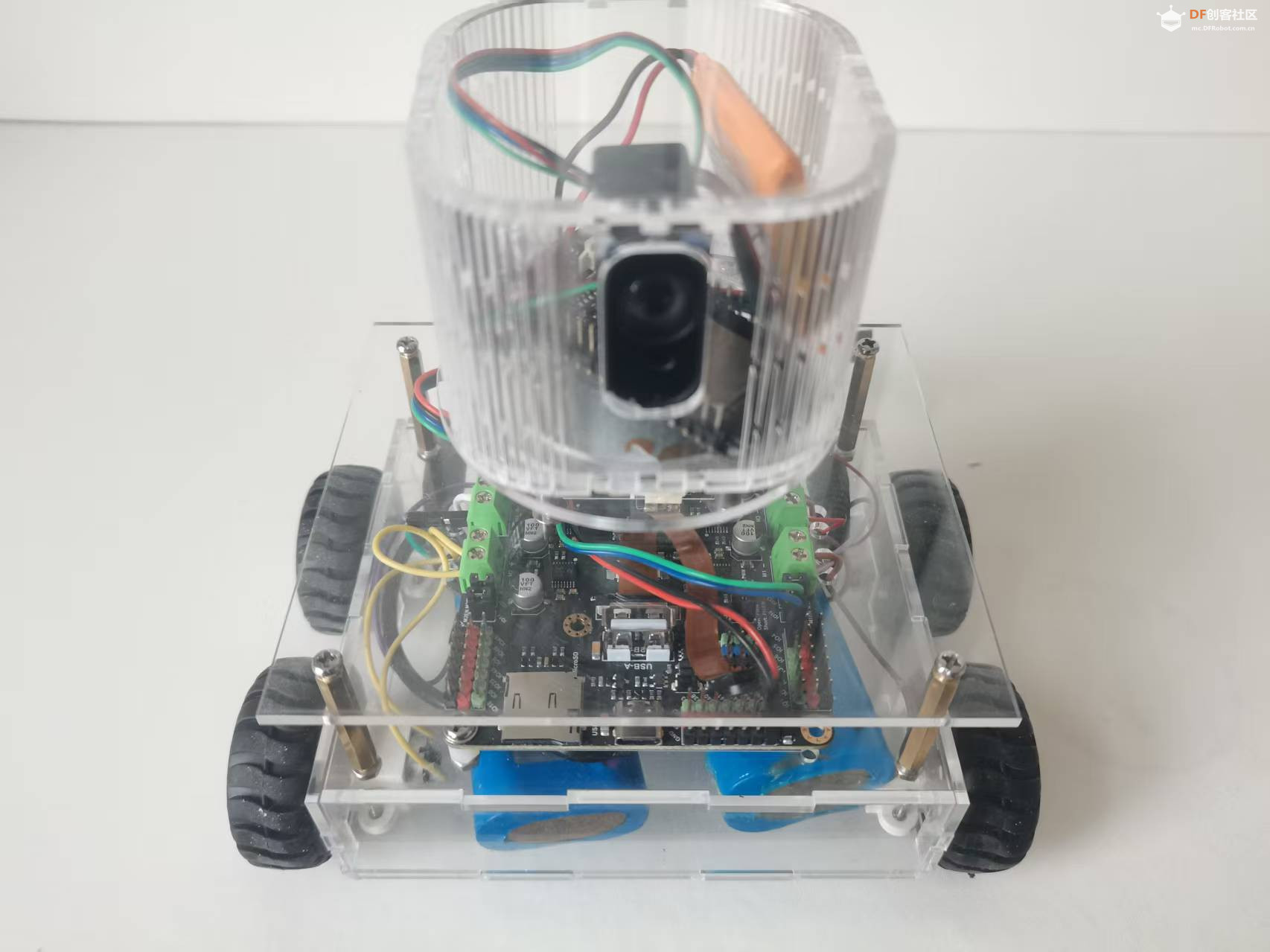
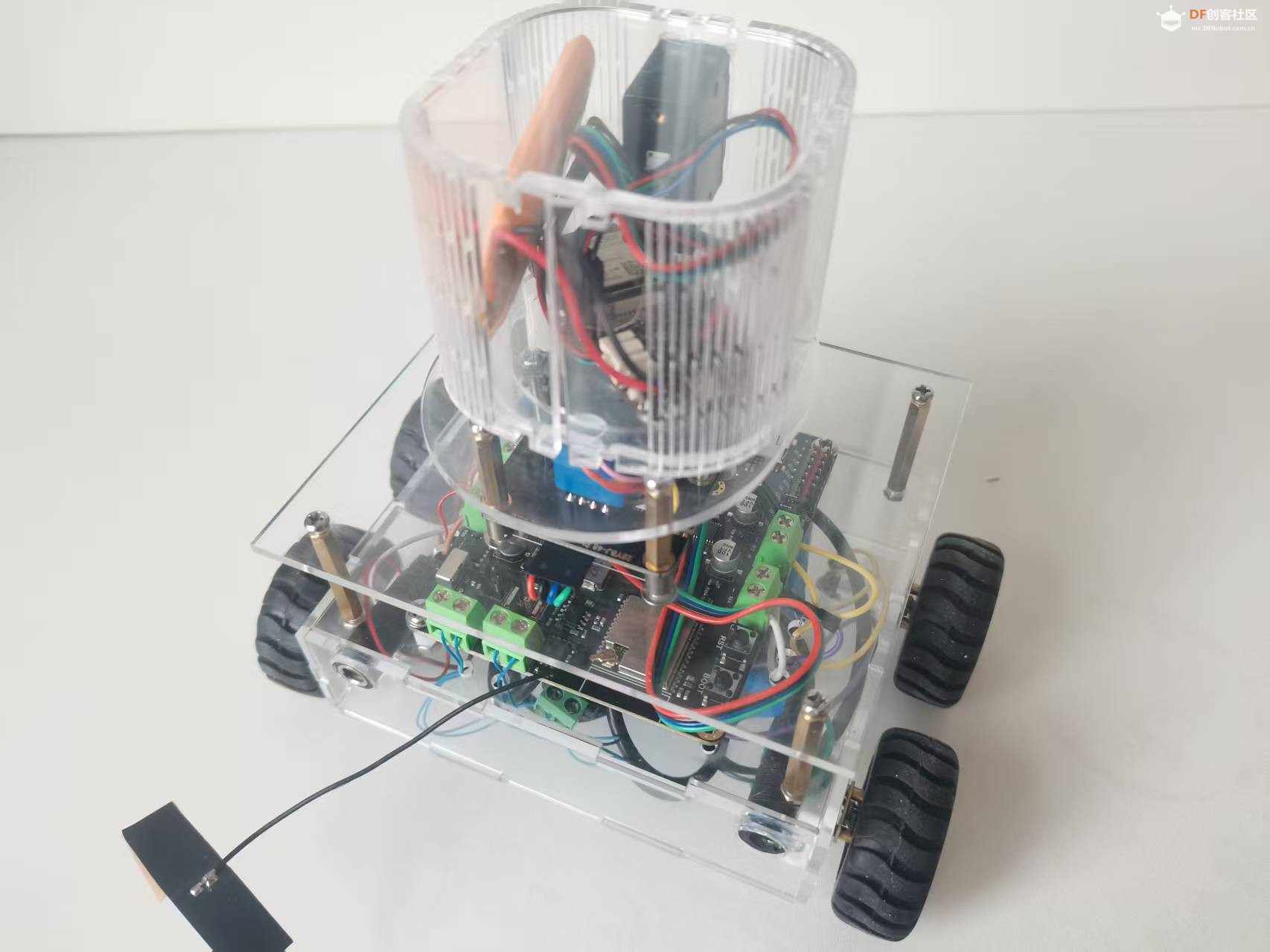
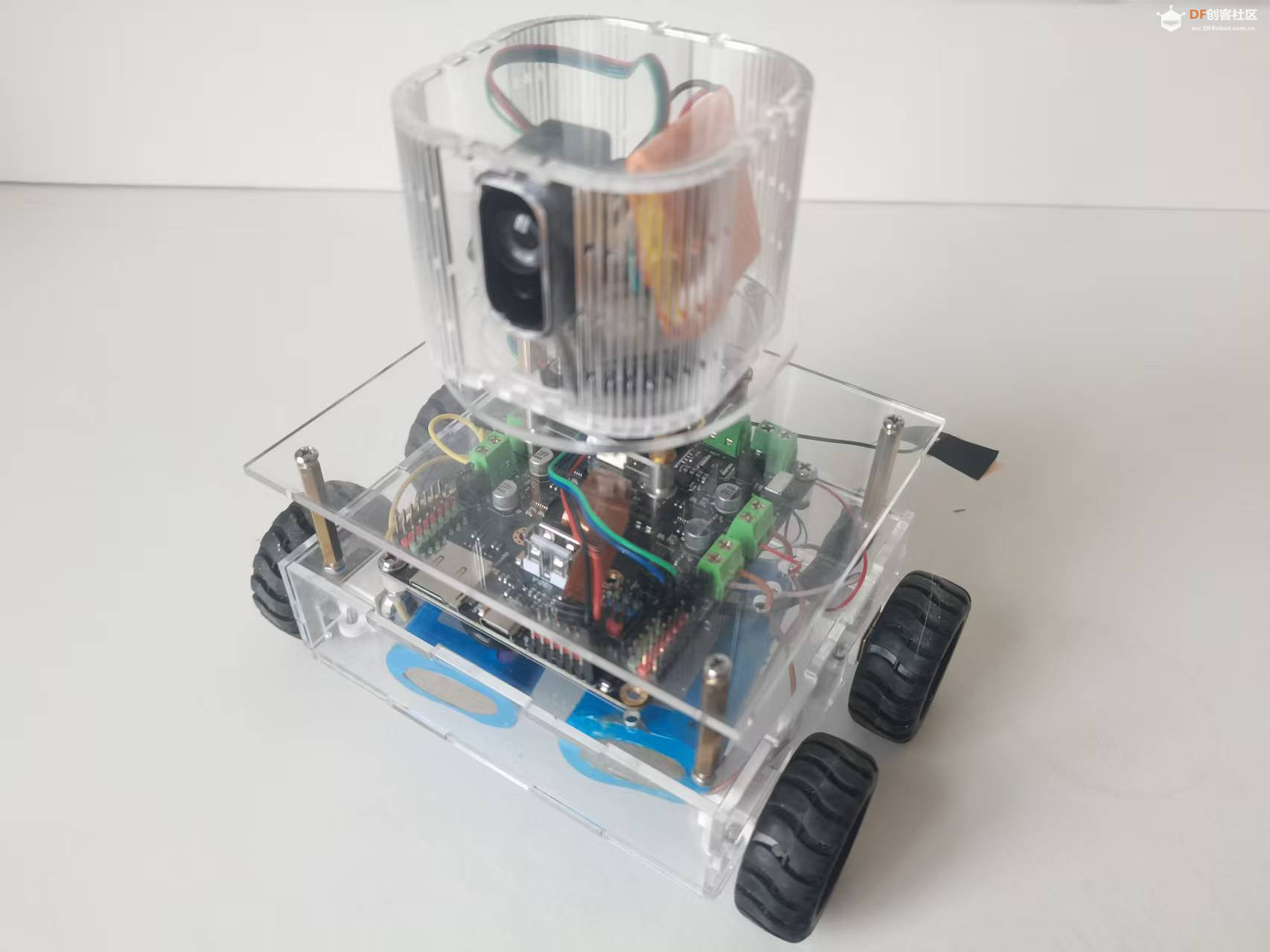
【硬件组装】
1.组装车底座与供电电池
2.组装主控板Romeo ESP32-S3
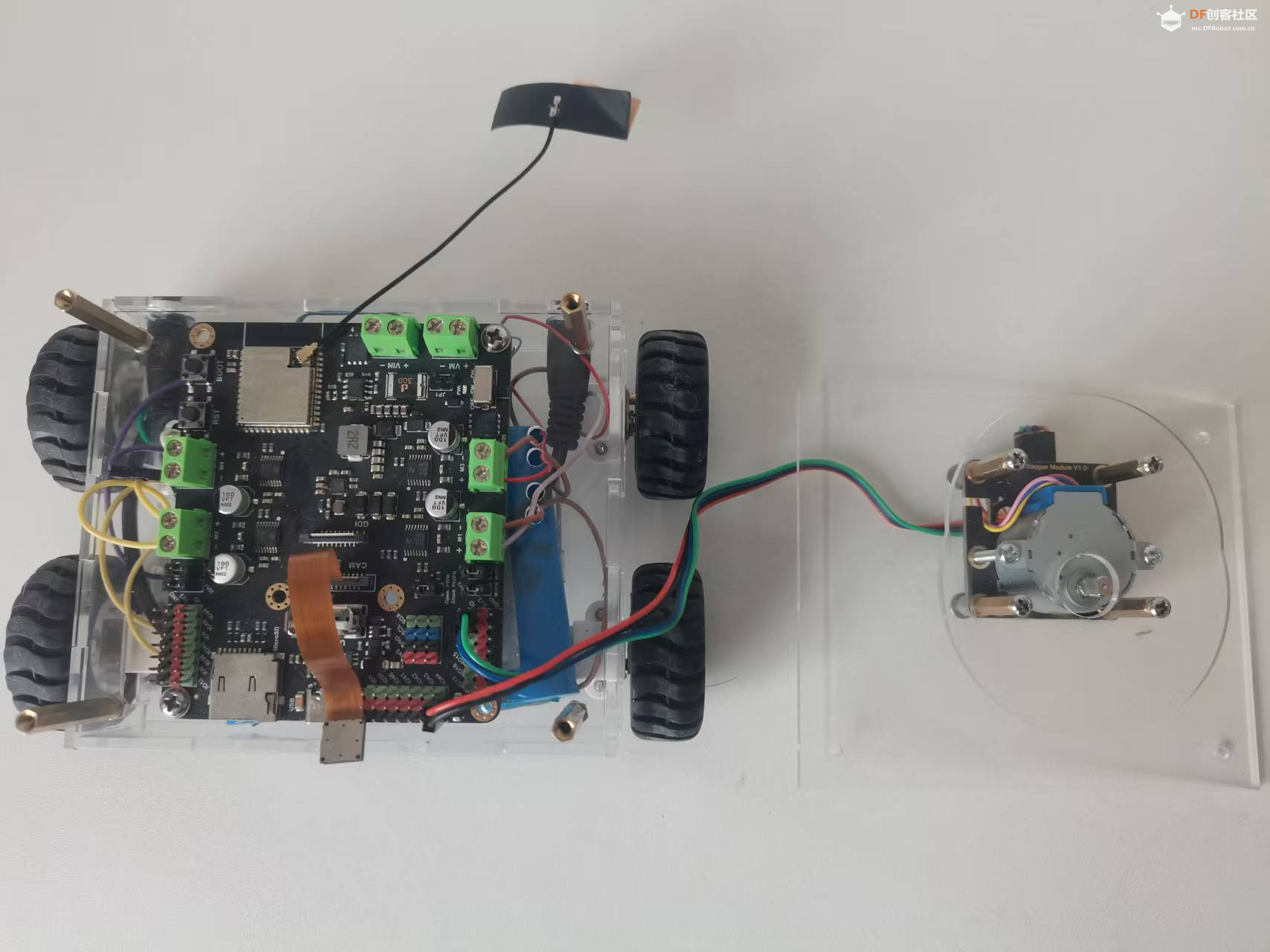
3.组装8BYJ-48步进电机驱动模块
4.组装TOF激光测距传感器
5.“雷达”车
【工作原理】
整体流程如下图所示:
1. “FireBeetle端”:上电后持续通过IIC读取TOF传感器的距离数据(每秒约5次),并通过ESP-NOW广播。
2. “Romeo端”:
上电后等待用户通过串口发送 `c` 命令校准方向(将当前传感器指向设为“前方”)。
进入**扫描模式**:步进电机以恒定速度单向(顺时针)旋转,每转过90°,等待接收FireBeetle发来的最新距离数据,并存入对应的方向数组(索引0:前, 1:右, 2:后, 3:左)。
同时小车以低速(20%速度)前进,实现“边前进边扫描”。
每完成一圈(四个方向都采集一次),调用决策函数:
若前方距离 > 1.5米 → 继续前进。
否则,比较左右方向距离,转向较空旷的一侧(原地旋转90°)。
若左右也受阻,但后方 > 1.5米 → 后退3秒。
全部受阻 → 随机转向90°。
动作完成后,回到扫描模式,循环执行。
【软件实现Arduino IDE】
FireBeetle 发送端代码
- #include <Wire.h>
- #include <esp_now.h>
- #include <WiFi.h>
-
- // ==================== TOF 传感器相关 ====================
- #define deviceaddress 0x08
-
- typedef struct {
- uint8_t id;
- uint8_t interface_mode;
- uint32_t uart_baudrate;
- uint32_t system_time;
- float dis;
- uint16_t dis_status;
- uint16_t signal_strength;
- uint8_t range_precision;
- } tof_parameter;
-
- tof_parameter tof0;
-
- int16_t i2c_readN(uint8_t registerAddress, uint8_t *buf, size_t len) {
- Wire.beginTransmission(deviceaddress);
- Wire.write(registerAddress);
- if (Wire.endTransmission(false) != 0) return -1;
- Wire.requestFrom(deviceaddress, len);
- int i = 0;
- while (Wire.available() && i < len) buf[i++] = Wire.read();
- return i;
- }
-
- bool recdData() {
- uint8_t pdata[48];
- if (i2c_readN(0x00, pdata, 32) != 32) return false;
- if (i2c_readN(0x20, &pdata[32], 16) != 16) return false;
-
- tof0.interface_mode = pdata[0x0c] & 0x07;
- tof0.id = pdata[0x0d];
- tof0.uart_baudrate = (uint32_t)(pdata[0x10] | (pdata[0x11] << 8) | (pdata[0x12] << 16) | (pdata[0x13] << 24));
- tof0.system_time = (uint32_t)(pdata[0x20] | (pdata[0x21] << 8) | (pdata[0x22] << 16) | (pdata[0x23] << 24));
- tof0.dis = (float)((uint32_t)(pdata[0x24] | (pdata[0x25] << 8) | (pdata[0x26] << 16) | (pdata[0x27] << 24))) / 1000.0f;
- tof0.dis_status = (uint16_t)(pdata[0x28] | (pdata[0x29] << 8));
- tof0.signal_strength = (uint16_t)(pdata[0x2a] | (pdata[0x2b] << 8));
- tof0.range_precision = pdata[0x2c];
- return true;
- }
-
- // ==================== ESP-NOW ====================
- typedef struct {
- float distance;
- uint16_t status;
- uint16_t signal;
- } sensor_data_t;
-
- sensor_data_t sendData;
-
- // Romeo ESP32-S3 MAC 地址
- uint8_t romeoMac[] = {0xEC, 0xDA, 0x3B, 0x65, 0xD2, 0xA0};
-
- esp_now_peer_info_t peerInfo;
-
- void OnDataSent(const uint8_t *mac_addr, esp_now_send_status_t status) {
- Serial.print("Send Status: ");
- Serial.println(status == ESP_NOW_SEND_SUCCESS ? "Success" : "Fail");
- }
-
- void setup() {
- Serial.begin(115200);
- Wire.begin(21, 22); // 根据实际接线修改 SDA, SCL
-
- WiFi.mode(WIFI_STA);
- if (esp_now_init() != ESP_OK) {
- Serial.println("ESP-NOW init failed");
- return;
- }
- esp_now_register_send_cb(OnDataSent);
- memcpy(peerInfo.peer_addr, romeoMac, 6);
- peerInfo.channel = 0;
- peerInfo.encrypt = false;
- if (esp_now_add_peer(&peerInfo) != ESP_OK) {
- Serial.println("Add peer failed");
- return;
- }
- Serial.println("FireBeetle TOF Sender Ready");
- }
-
- void loop() {
- if (recdData()) {
- sendData.distance = tof0.dis;
- sendData.status = tof0.dis_status;
- sendData.signal = tof0.signal_strength;
- esp_now_send(romeoMac, (uint8_t*)&sendData, sizeof(sendData));
- Serial.printf("Sent: %.2f m, status=%d\n", tof0.dis, tof0.dis_status);
- } else {
- Serial.println("Sensor read failed");
- }
- delay(200);
- }
Romeo 接收端代码
- #include <esp_now.h>
- #include <WiFi.h>
-
- // ==================== 引脚定义 ====================
- #define STEP_PIN 4
- #define DIR_PIN 5
-
- #define M_RF_EN 12
- #define M_RF_PH 13
- #define M_LF_EN 14
- #define M_LF_PH 21
- #define M_RR_EN 9
- #define M_RR_PH 10
- #define M_LR_EN 47
- #define M_LR_PH 11
-
- // ==================== 步进电机参数 ====================
- const int STEPS_PER_REV = 2048; // 实测一圈步数
- const float STEP_ANGLE = 360.0 / STEPS_PER_REV; // 每步角度 ≈ 0.17578°
-
- // ==================== 扫描参数 ====================
- const float SCAN_STEP = 90.0; // 每次转动角度(90°)
- const int NUM_DIRECTIONS = 4; // 方向数量
- float distances[NUM_DIRECTIONS]; // 存储四个方向的距离(索引0:前, 1:右, 2:后, 3:左)
- float currentAngle = 0.0; // 当前TOF指向的角度(相对于车头前方,0°=前,顺时针增加)
- int scanCount = 0; // 记录当前圈内已采集的方向数(0~3)
- bool scanning = true; // 是否正在扫描(true:扫描中, false:执行动作中)
- unsigned long actionStartTime = 0; // 动作开始时间
-
- // 安全阈值(米)
- const float SAFE_DIST = 1.5;
-
- // ==================== ESP-NOW ====================
- typedef struct {
- float distance;
- uint16_t status;
- uint16_t signal;
- } sensor_data_t;
-
- sensor_data_t receivedData;
- bool newDataAvailable = false;
-
- // FireBeetle MAC 地址
- uint8_t firebeetleMac[] = {0x7C, 0x9E, 0xBD, 0xD3, 0x63, 0x40};
-
- // ==================== 电机 PWM ====================
- const int pwmFreq = 2000;
- const int pwmResolution = 8;
- const int pwmChannels[4] = {0, 1, 2, 3};
- const int enPins[4] = {M_RF_EN, M_LF_EN, M_RR_EN, M_LR_EN};
- const int phPins[4] = {M_RF_PH, M_LF_PH, M_RR_PH, M_LR_PH};
- const int SCAN_SPEED = 10; // 扫描时的前进速度(0-100)
- // ==================== 校准相关 ====================
- long headingOffsetSteps = 0; // 车身正方向对应的绝对步数偏移
- long currentStepPosition = 0; // 当前电机所处的绝对步数(相对于上电时的位置)
- bool calibrated = false;
-
- // ==================== 函数声明 ====================
- void stepperRotateRelative(float deltaAngle);
- void setMotor(int idx, int speedPercent, bool forward);
- void moveForward(int speed);
- void moveBackward(int speed);
- void turnLeft(int speed, bool pivot);
- void turnRight(int speed, bool pivot);
- void stopMotors();
- void checkSerialCommand();
- void analyzeAndAct();
-
- // ==================== ESP-NOW 回调 ====================
- void OnDataRecv(const uint8_t *mac, const uint8_t *incomingData, int len) {
- memcpy(&receivedData, incomingData, sizeof(receivedData));
- newDataAvailable = true;
- }
-
- // ==================== 初始化 ====================
- void setup() {
- Serial.begin(115200);
- Serial.println("Send 'c' to calibrate forward direction (0°).");
-
- // 电机引脚初始化
- for (int i = 0; i < 4; i++) {
- pinMode(enPins[i], OUTPUT);
- pinMode(phPins[i], OUTPUT);
- digitalWrite(phPins[i], LOW);
- digitalWrite(enPins[i], LOW);
- }
- for (int i = 0; i < 4; i++) {
- ledcSetup(pwmChannels[i], pwmFreq, pwmResolution);
- ledcAttachPin(enPins[i], pwmChannels[i]);
- }
-
- // 步进电机引脚
- pinMode(STEP_PIN, OUTPUT);
- pinMode(DIR_PIN, OUTPUT);
- digitalWrite(STEP_PIN, LOW);
- digitalWrite(DIR_PIN, LOW);
-
- // Wi-Fi 和 ESP-NOW
- WiFi.mode(WIFI_STA);
- if (esp_now_init() != ESP_OK) {
- Serial.println("ESP-NOW init failed");
- return;
- }
- esp_now_register_recv_cb(OnDataRecv);
-
- esp_now_peer_info_t peerInfo;
- memcpy(peerInfo.peer_addr, firebeetleMac, 6);
- peerInfo.channel = 0;
- peerInfo.encrypt = false;
- if (esp_now_add_peer(&peerInfo) != ESP_OK) {
- Serial.println("Add peer failed (may already exist)");
- }
-
- Serial.println("Romeo Controller Ready");
- delay(10000);
- }
-
- // ==================== 主循环 ====================
- void loop() {
- checkSerialCommand(); // 监听串口校准命令
-
- if (scanning) {
- // 扫描时小车以恒定速度前进
- moveForward(SCAN_SPEED);
-
- // 1. 相对转动 SCAN_STEP 度(持续顺时针)
- stepperRotateRelative(SCAN_STEP);
-
- // 2. 等待接收数据(最多 500ms)
- unsigned long startWait = millis();
- while (!newDataAvailable && (millis() - startWait < 500)) {
- delay(10);
- }
-
- // 3. 根据当前角度计算理论方向索引(0前,1右,2后,3左)
- int rawIndex = (int)(currentAngle / SCAN_STEP + 0.5) % NUM_DIRECTIONS;
- // 由于电机实际转向可能与预期相反,交换左右索引(1和3)
- int dirIndex = rawIndex;
- if (rawIndex == 1) dirIndex = 3;
- else if (rawIndex == 3) dirIndex = 1;
- // 前(0)和后(2)保持不变
-
- // 4. 记录距离
- if (newDataAvailable) {
- newDataAvailable = false;
- distances[dirIndex] = receivedData.distance;
- Serial.printf("Angle %.0f° -> Dir %d (raw %d): %.2f m\n", currentAngle, dirIndex, rawIndex, receivedData.distance);
- } else {
- // 超时,假设无障碍(设为较大值)
- distances[dirIndex] = 10.0;
- Serial.printf("Angle %.0f° -> Dir %d (raw %d): timeout, assume clear\n", currentAngle, dirIndex, rawIndex);
- }
-
- scanCount++;
- if (scanCount >= NUM_DIRECTIONS) {
- // 完成一圈扫描
- scanning = false;
- scanCount = 0;
- Serial.println("One full circle completed. Analyzing...");
- analyzeAndAct();
- }
- } else {
- // 非扫描状态:执行动作(移动中),等待动作完成
- if (millis() - actionStartTime > 3000) {
- scanning = true;
- stopMotors(); // 可选,停止电机准备下一轮扫描
- }
- }
- }
-
- // ==================== 数据分析与动作执行 ====================
- void analyzeAndAct() {
- // 打印四个方向距离
- Serial.print("Front: "); Serial.print(distances[0]); Serial.print(" m, ");
- Serial.print("Right: "); Serial.print(distances[1]); Serial.print(" m, ");
- Serial.print("Back: "); Serial.print(distances[2]); Serial.print(" m, ");
- Serial.print("Left: "); Serial.println(distances[3]); Serial.print(" m");
-
- // 决策逻辑:
- // 1. 如果前方距离 > 安全阈值,前进
- if (distances[0] > SAFE_DIST) {
- Serial.println("Action: Move Forward");
- moveForward(10);
- actionStartTime = millis();
- }
- // 2. 否则,检查左右哪个更远,就转向哪个方向
- else if (distances[1] > distances[3] && distances[1] > SAFE_DIST) {
- Serial.println("Action: Turn Right");
- turnRight(20, true); // 原地右转
- delay(2000);
- stopMotors();
- actionStartTime = millis();
- }
- else if (distances[3] > distances[1] && distances[3] > SAFE_DIST) {
- Serial.println("Action: Turn Left");
- turnLeft(20, true);
- delay(2000);
- stopMotors();
- actionStartTime = millis();
- }
- // 3. 如果左右都不行,但后方可行,后退
- else if (distances[2] > SAFE_DIST) {
- Serial.println("Action: Move Backward");
- moveBackward(15);
- actionStartTime = millis();
- }
- // 4. 所有方向都危险,原地旋转随机方向
- else {
- Serial.println("Action: All blocked, spin randomly");
- if (random(0, 2) == 0) turnLeft(20, true);
- else turnRight(20, true);
- delay(2000);
- stopMotors();
- actionStartTime = millis();
- }
- }
-
- // ==================== 串口命令处理 ====================
- void checkSerialCommand() {
- if (Serial.available()) {
- char c = Serial.read();
- if (c == 'c' || c == 'C') {
- headingOffsetSteps = currentStepPosition;
- currentStepPosition = 0;
- currentAngle = 0.0;
- calibrated = true;
- Serial.println("Calibration OK! Current direction is now FORWARD (0°).");
- }
- }
- }
-
- // ==================== 步进电机相对转动 ====================
- void stepperRotateRelative(float deltaAngle) {
- long deltaSteps = round(deltaAngle / STEP_ANGLE);
- if (deltaSteps == 0) return;
-
- bool clockwise = (deltaSteps > 0); // 正角度为顺时针
- long stepsToMove = abs(deltaSteps);
-
- digitalWrite(DIR_PIN, clockwise ? HIGH : LOW);
- for (long i = 0; i < stepsToMove; i++) {
- digitalWrite(STEP_PIN, HIGH);
- delayMicroseconds(1000);
- digitalWrite(STEP_PIN, LOW);
- delayMicroseconds(1000);
- }
-
- // 更新当前位置和角度
- if (clockwise) {
- currentStepPosition += stepsToMove;
- currentAngle += deltaAngle;
- } else {
- currentStepPosition -= stepsToMove;
- currentAngle -= deltaAngle;
- }
-
- // 归一化到 0~360 度
- while (currentAngle >= 360.0) currentAngle -= 360.0;
- while (currentAngle < 0.0) currentAngle += 360.0;
- }
-
- // ==================== 直流电机控制 ====================
- void setMotor(int idx, int speedPercent, bool forward) {
- if (idx < 0 || idx >= 4) return;
- speedPercent = constrain(speedPercent, 0, 100);
- int pwmVal = map(speedPercent, 0, 100, 0, 255);
- digitalWrite(phPins[idx], forward ? HIGH : LOW);
- ledcWrite(pwmChannels[idx], pwmVal);
- }
-
- void moveForward(int speed) {
- for (int i = 0; i < 4; i++) setMotor(i, speed, true);
- }
- void moveBackward(int speed) {
- for (int i = 0; i < 4; i++) setMotor(i, speed, false);
- }
- void turnLeft(int speed, bool pivot) {
- if (pivot) {
- setMotor(0, speed, true); // 右前
- setMotor(1, speed, false); // 左前
- setMotor(2, speed, true); // 右后
- setMotor(3, speed, false); // 左后
- } else {
- setMotor(0, speed, true);
- setMotor(1, speed / 2, true);
- setMotor(2, speed, true);
- setMotor(3, speed / 2, true);
- }
- }
- void turnRight(int speed, bool pivot) {
- if (pivot) {
- setMotor(0, speed, false); // 右前
- setMotor(1, speed, true); // 左前
- setMotor(2, speed, false); // 右后
- setMotor(3, speed, true); // 左后
- } else {
- setMotor(0, speed / 2, true);
- setMotor(1, speed, true);
- setMotor(2, speed / 2, true);
- setMotor(3, speed, true);
- }
- }
- void stopMotors() {
- for (int i = 0; i < 4; i++) ledcWrite(pwmChannels[i], 0);
- }
【调试过程与踩坑记录】
步进电机一圈步数实测
按照28BYJ-48的减速比1/64,理论上输出轴一圈需4096步。但实际运行时,发现转动90°只转了180°。经过排查,发现驱动模块工作在**全步/双拍模式**,实际一圈只需2048步。因此代码中将 `STEPS_PER_REV` 设为2048,问题解决。
左右方向相反
当传感器转到右侧时,程序却显示“左”方向距离。原因可能是步进电机实际转向与预期相反。通过软件映射:在 `loop` 中计算 `rawIndex` 后,交换索引1和3(即 `if(rawIdx==1) dirIdx=3; else if(rawIdx==3) dirIdx=1;`),轻松修正。
转向延时确定
为了精确原地旋转90°,我通过实验调节了 `turnRight` 后的 `delay` 时间。最终发现速度15%下,延时2000ms正好转90°。这个参数与地面摩擦、电池电压有关,可根据实际情况微调。
前进时扫描
最初扫描时小车静止,但我想让它在前进中感知环境。只需在 `if(scanning)` 开头加上 `moveForward(SCAN_SPEED);`,即可实现边前进边旋转扫描。
ESP-NOW 添加对等设备失败
虽然串口打印“Add peer failed”,但通信正常。这是因为之前可能已经添加过该设备,忽略即可。
【最终效果】
经过调试,小车能在室内环境中自主导航:
当前方1米内无障碍时,保持直行;
遇到障碍时,扫描左右,选择较空旷的方向转向;
若四面受阻,则随机转向或后退;
整个过程中,步进电机持续旋转,数据实时更新。
【总结与拓展】
本项目展示了如何利用两块ESP32通过ESP-NOW协同工作,实现一个功能完整的激光扫描避障小车。你可以在此基础上进行更多拓展:
“增加扫描分辨率”:将 `SCAN_STEP` 改为45°或30°,获取更精细的环境信息。
“加入PID速度控制”:让前进和转向更平滑。
“远程监控”:通过Wi-Fi将距离数据及摄像头图像发送到手机或电脑。
“路径规划”:结合多个方向数据,实现沿墙走或探索算法。
希望这个项目能给你带来启发!如有任何问题,欢迎在评论区交流讨论。
|





 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创客造
创客造
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






