|
19313| 12
|
[项目] 全新自平衡机器人NANO~~东半球最小的自平衡机器(转) |
|
本帖最后由 大连林海 于 2015-8-3 15:49 编辑 6-4更新,APP支援加入,基于github上一个开源的安卓项目,修改了通信协议,可以很好地跟nano配合。视频里演示了曲线示波器,虚拟摇杆以及重力感应功能,其实还可以有更多设置的,之后有空再慢慢研究。 以及,依然没有加入追踪功能...机器人调试时跑得太欢把头撞破了,红外滤光片(以及我脆弱的心)碎裂,tb上重新买了一个等货中。。  6-2更新,添加参数调节功能,以及eeprom储存,因为io有限只设置了一个按键,因此使用两个轮子的编码器充当滚轮旋钮,使用起来还挺顺手的。。目前只是需要调节平衡点的参数,虽然有了速度环闭环车子会自动找到平衡点,但是需要前后走动一段距离才能确定平衡点,因此还是增加一个设置功能作为微调。视频中还演示了超声波的一个简单应用(其实是我手的超能力) 6-1再次更新,加入速度环(前后运动)和方向环(转向以及保持偏航角)控制。不得不说小车的参数真的难调。。由于结构和电机性能限制使得平衡算法跟大车大相径庭;调试过程中还遇到了电池功率过载经常自动断电的情况,最后不得不把电池的保护板去除了解决问题,这样就需要在充电器上添加过充保护电路了。目前算是实现了各个自由度的控制,之后参数再仔细整定一下效果应该会更好一些。下一步是整合目标跟踪的功能。 5-28更新超声波和摄像头的联调测试效果,通过摄像头捕捉光点在平面的坐标,超声波获取深度信息 演示效果 题归正传,上次做蛋黄的时候因为自己也没有太多经验所以其实还是存在很多可以改进的地方的,这次重新设计了结构和功能,蛋黄变蛋白,更萌更强更好玩  贴几张制作过程的图片,结构件大多使用3D打印制作的  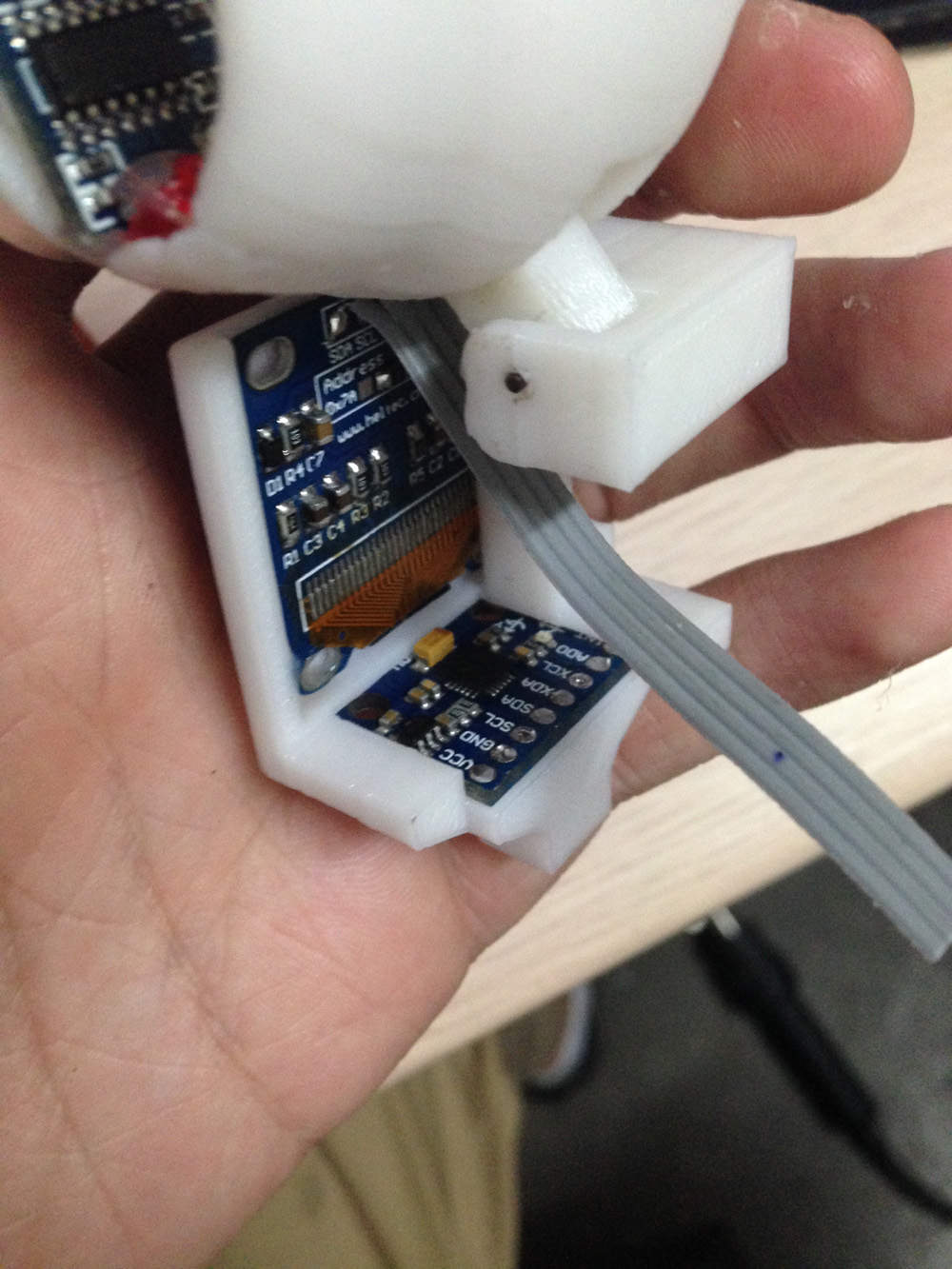  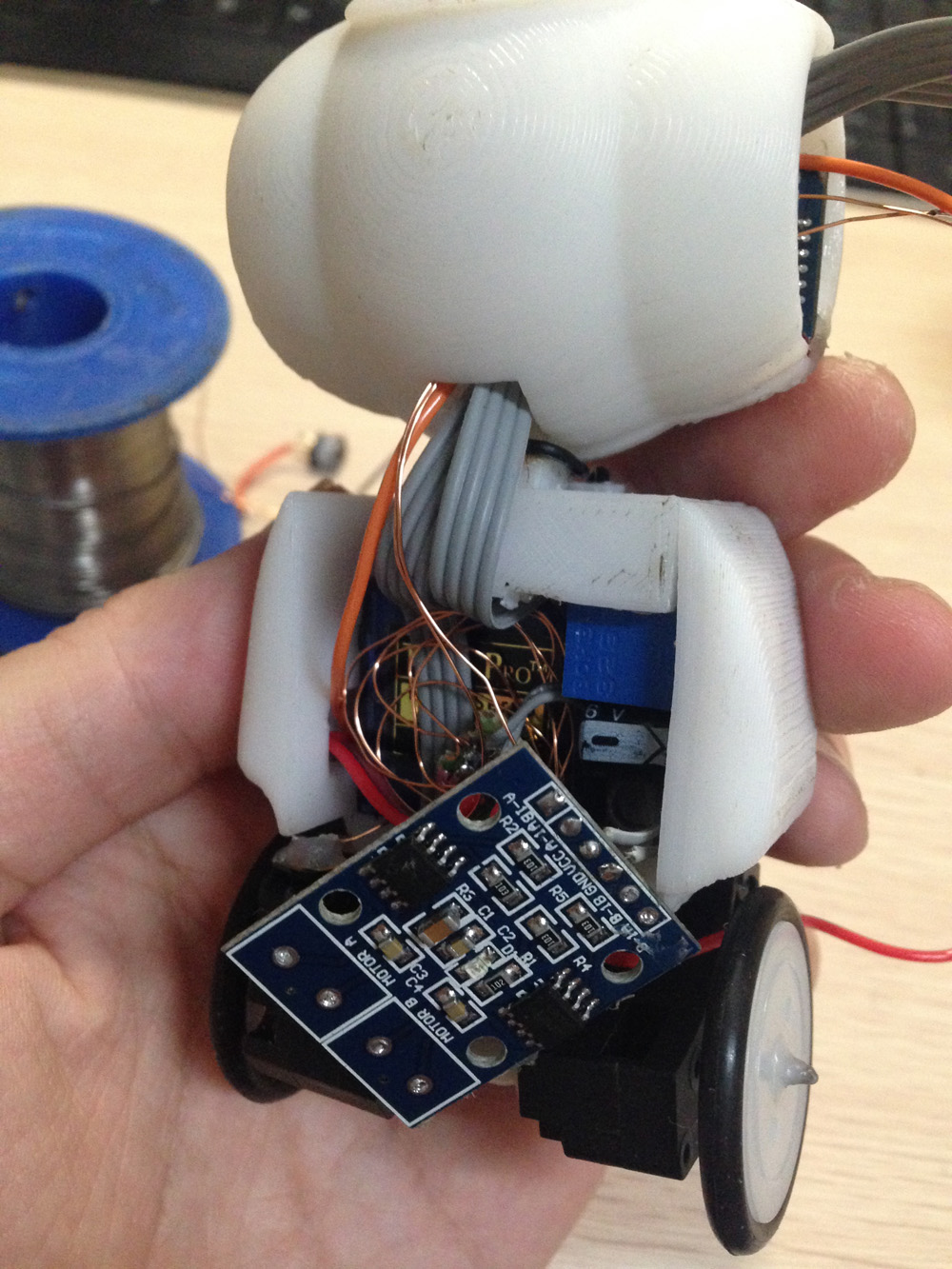 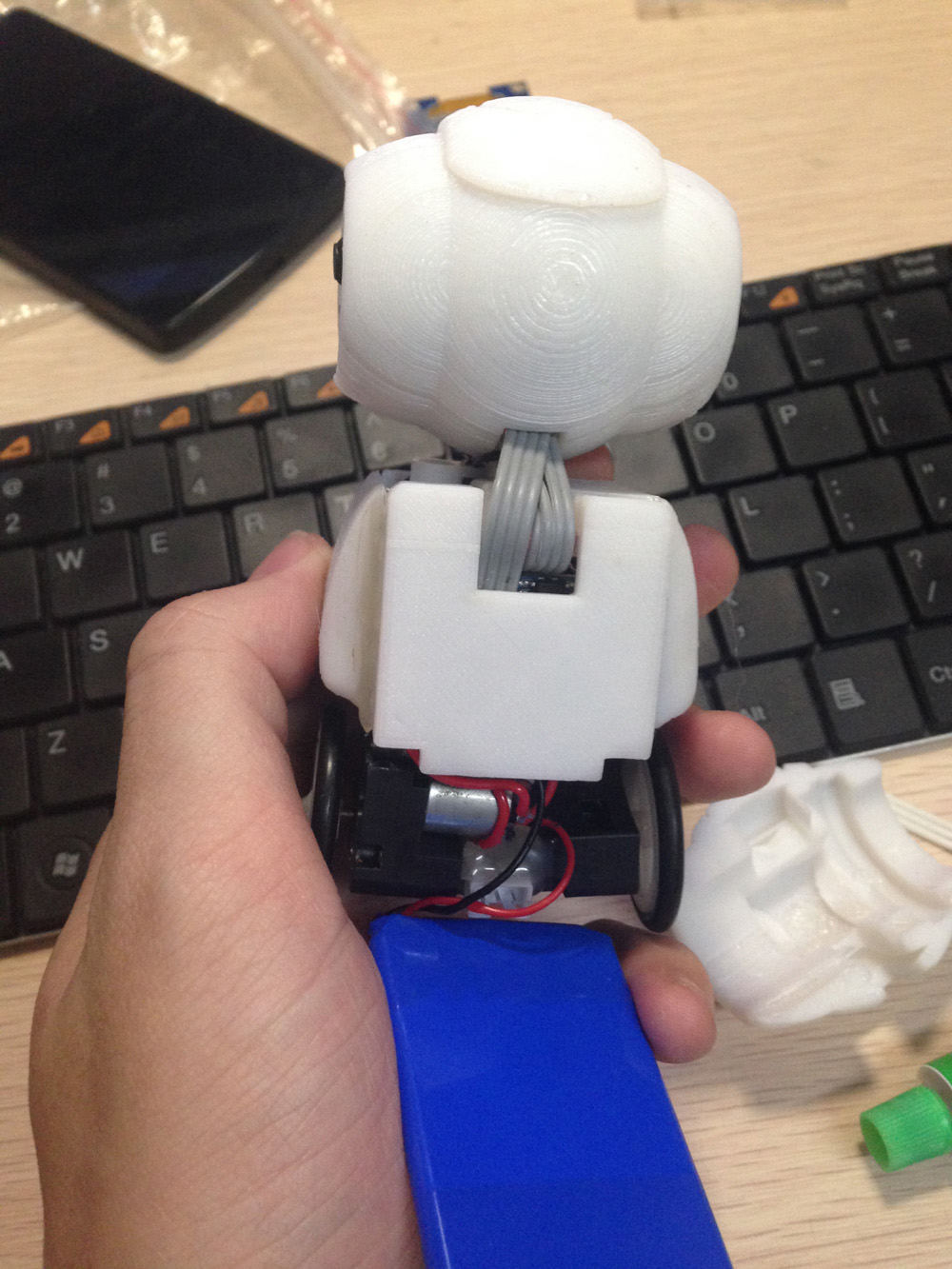  目前还在编写软件中,已经实现了直立和显示,等项目完全做好了再来详细编辑帖子 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 小蘑菇
小蘑菇
 荣誉教师
荣誉教师






