|
114713| 53
|
[项目] 单舵机蠕动机器人(详细教程) |
如果你觉得人形机器人制作很复杂,那么试试机械臂吧,假如你还觉得困难,那么这款单伺服蠕动机器人就是你最后的选择了。它只靠一个舵机控制行走,一块Arduino mini和3D打印部件是它整个身体的主要组成部分,在完善设计的同时为后续的搭建开发提供了一个平台。它可以前进以及引导左和右,现在它还没有传感器,只能直线行走,后续可以增加两个光传感器或者添加一个距离传感器,这样它就可以自我控制左右和避开障碍了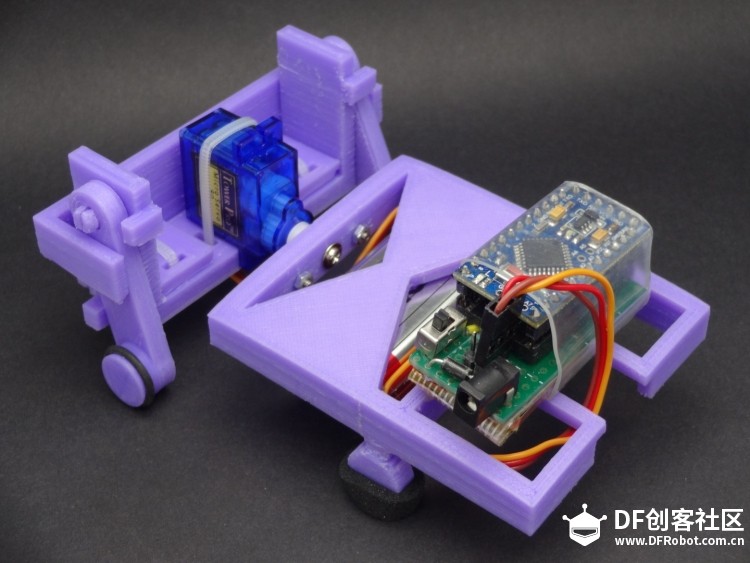 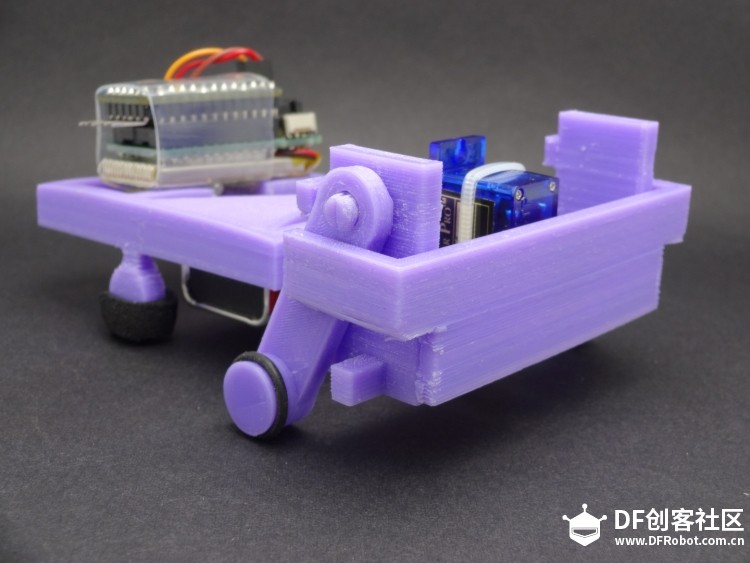 项目材料:一块一块Arduino mini控制板 一台3D打印机(打印机器人3D部件) 一块锂电池 三条捆扎带 一个9克舵机 一块洞洞板焊接的扩展板(包含整流二极管1个、开关1个、5v充电插口1个、排针和插座) 热熔胶枪 透明热缩管 O型密封圈2个 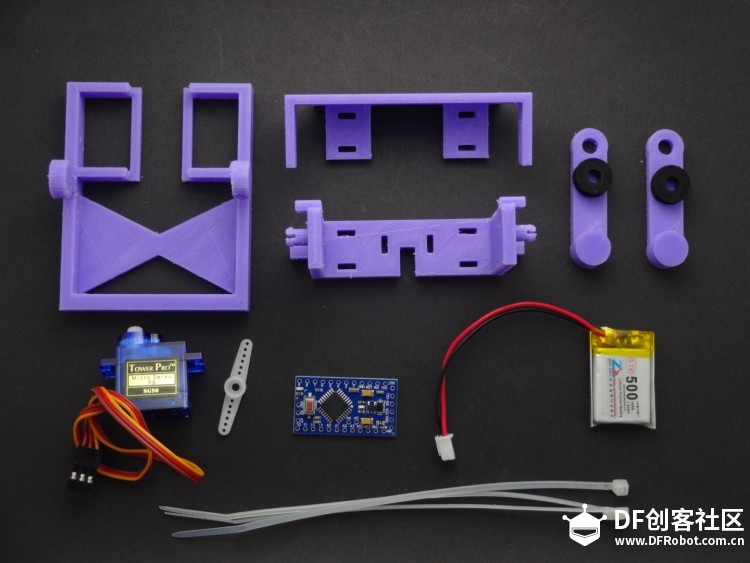  【制作过程】 第一步,打印机器人主体结构部分。 1、用1.75mmPLA线材打印机器人结构主体,将打印填充率设置为70%。 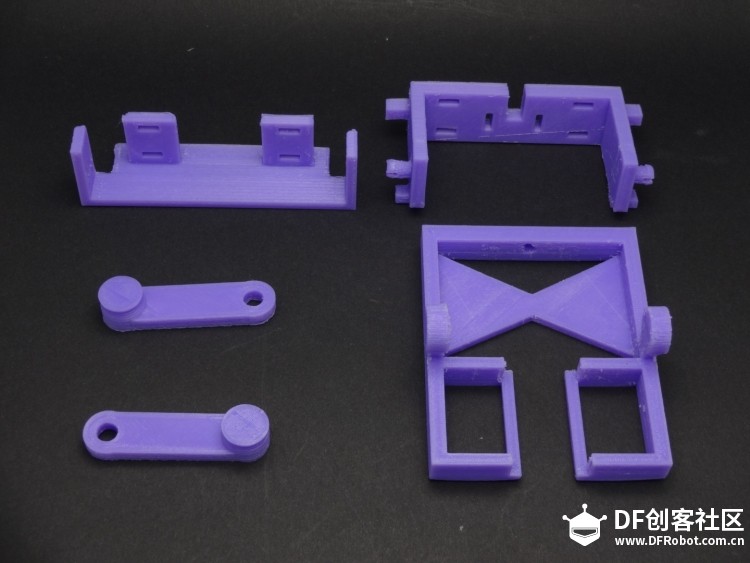 2、将机器人两前腿装上O型密封圈(我这里用海绵圈代替),接着把两腿装入头部活动支架,安装好舵机座。  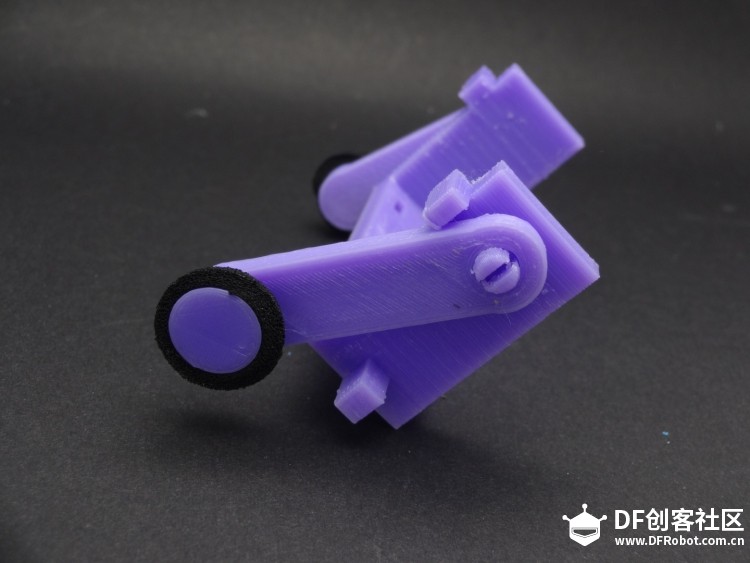  3、用3根捆扎带分别将头部活动支架和舵机固定起来,并把舵机伺服转角用螺丝安装好。  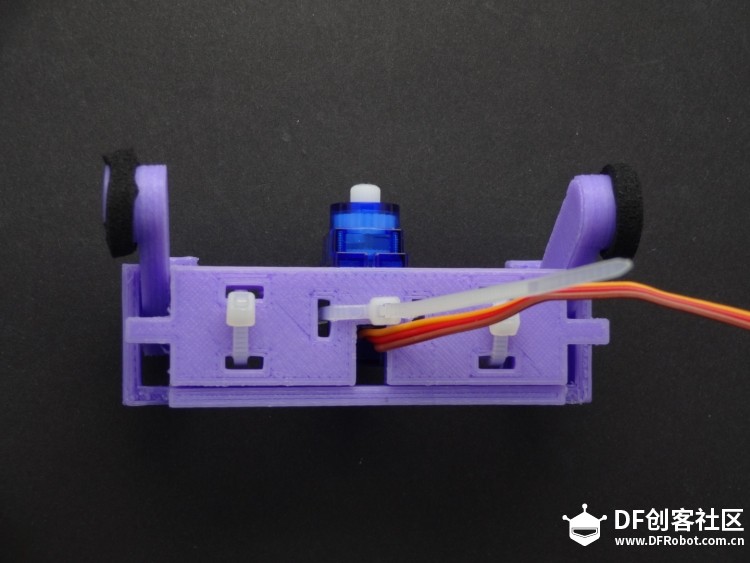  4、将机器人头部和身体用螺丝与舵机转轴链接起来,考虑到控制板和电池质量较轻,机器人身体平衡和脚部摩擦力下降,影响蠕动机器人前进行动的速度,这里我用一块废旧9V电池安装在底盘上来调节重心,为了美观我并没有用捆扎带来固定电池,而是用热熔胶固定。 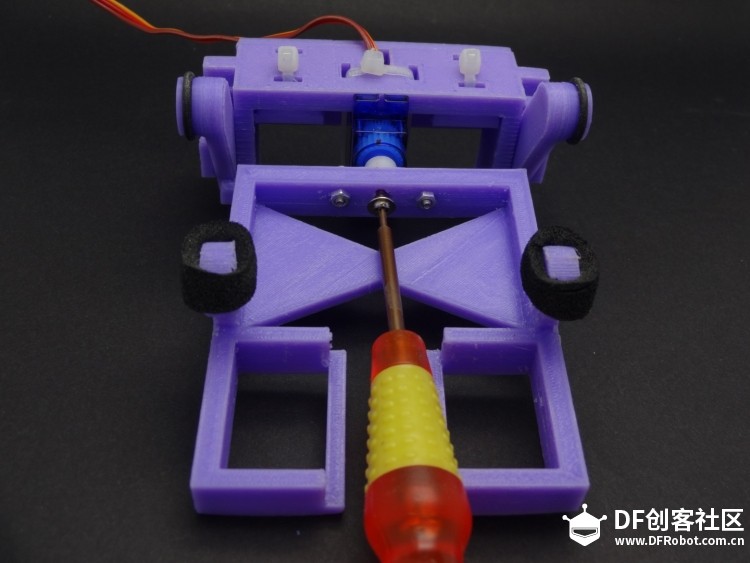 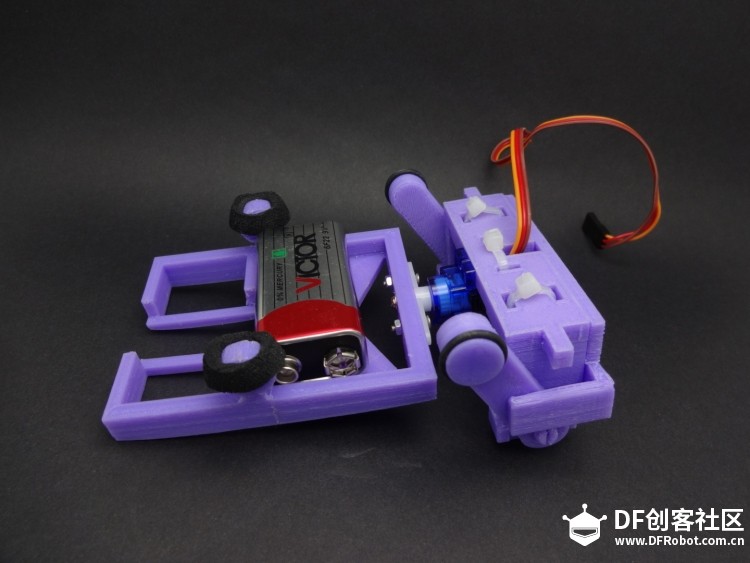 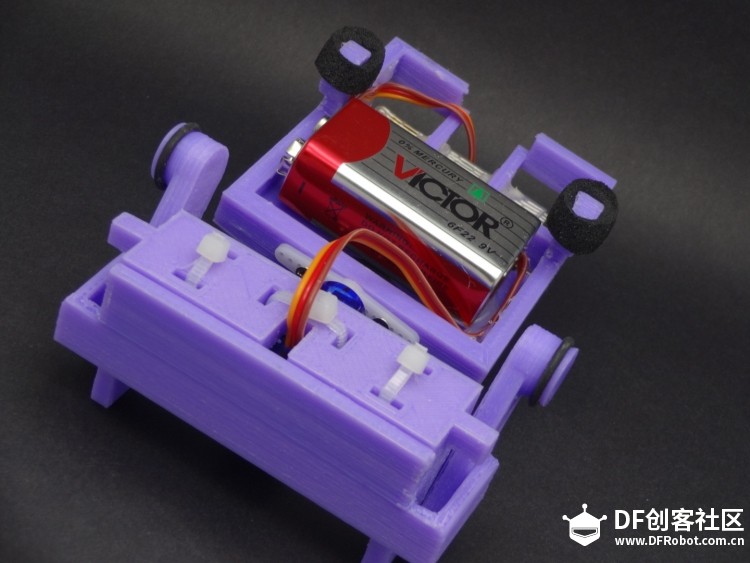 第二部分,Arduino控制扩展板焊接。 1、焊接Arduino控制板及扩展板,由于时间关系我没有用绘图软件画接线图,我只用笔随便画了一下简单的接线图,大家不要介意能看懂就行。按照电路图焊接好控制板后剪一段透明热缩管套在控制主板,用热风枪对其加热收缩,这个主要是保护主板防止人体静电,冬天嘛你懂得。。 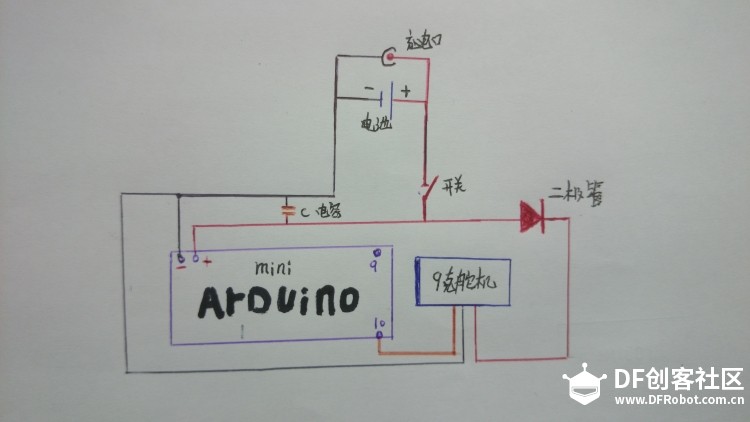  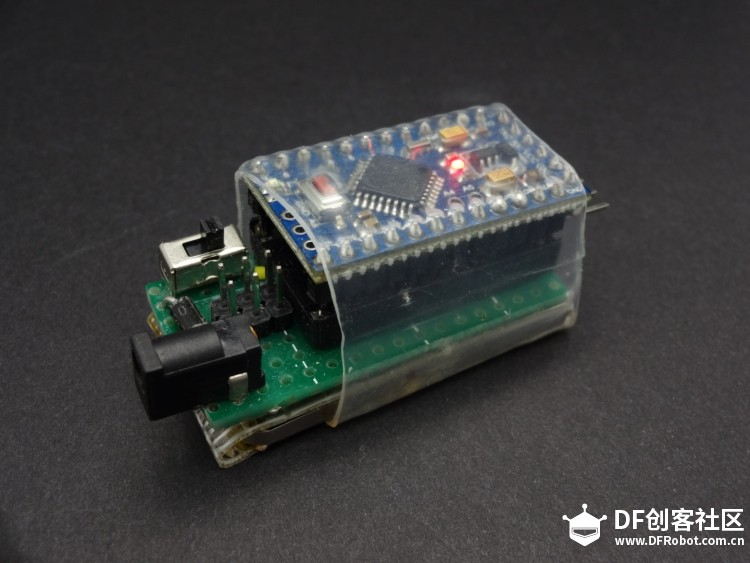 2、接着当然还没结束,还有程序呢?!都说了每个人都能轻轻松松制作出来的机器人,程序就这么简单! 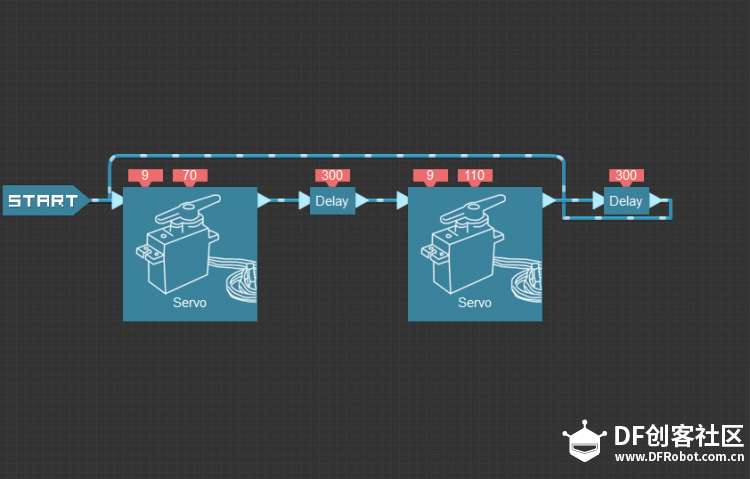 3、最后把程序上传到Arduino板子里,到这一步蠕动机器人的制作基本上就算完成了,上图看看最终完成的样子,看起来好厉害的样子,现在我就知道你也想制作一个是吧?没关系已经把3D模型的文件附到文章结尾处了。 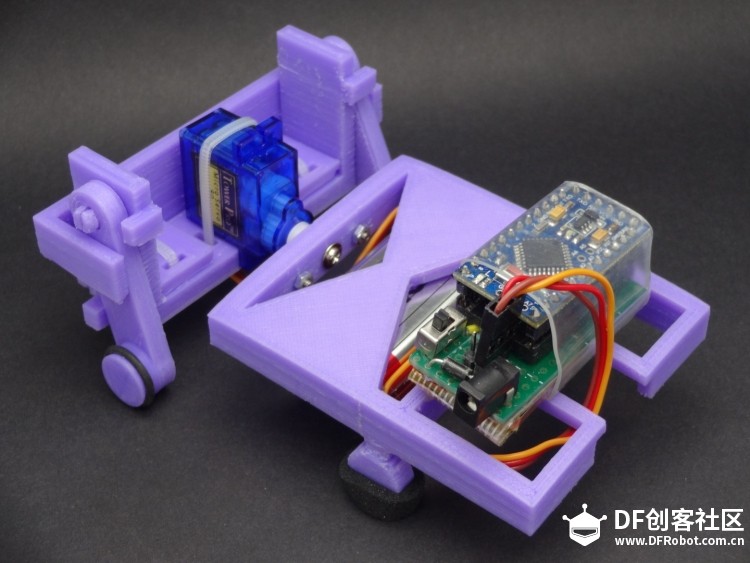  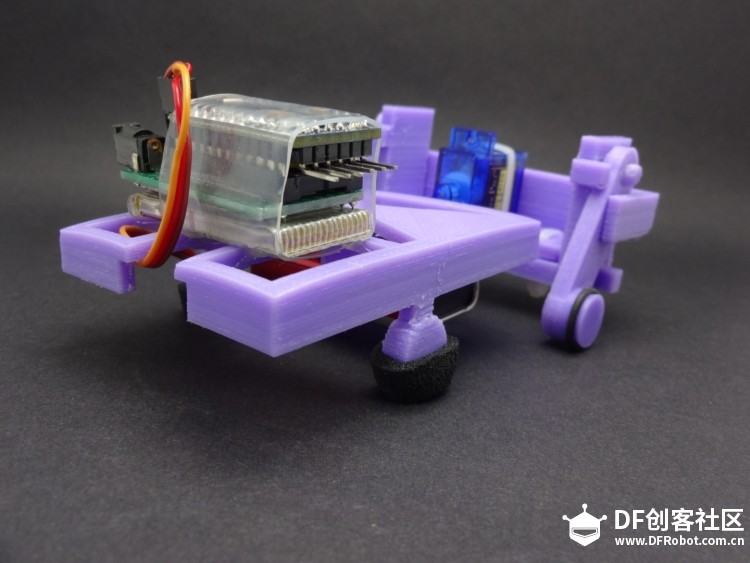 【总结】 这个平台大家如果有兴趣的话可以继续扩展一下,让它的功能更多些,当然它也可以几个串联在一起开发像仿生毛毛虫什么的都行,好了本人在DF第一次发帖讲的不对的地方请各位谅解,后续我将继续发帖希望得到各位的支持,我非常荣幸能在DF和各位创客老师们一起探讨项目,再见!  One_Servo_Walker_-_Single_Servo_Robot.zip One_Servo_Walker_-_Single_Servo_Robot.zip |
 创作达人
创作达人
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 赞赞赞!
赞赞赞!











