|
13936| 4
|
[进阶] 四轴飞行器飞控研究(三)--姿态完整改进算法 |
|
继之前研究了一些飞行姿态理论方面的问题后,又找到了之前很流行的一段外国大神写的代码,来分析分析。 第二篇文章的最后,讲到了文章中的算法在实际使用中有重大缺陷。 大家都知道,分析算法理论的时候很多情况下我们没有考虑太多外界干扰的情况,原因是很多情况下,传感器的精度以及受到的干扰并不会特别大,而显著的影响到算法。但是在IMU系统中,有点不同。由于地磁场十分微弱,而我们生活中有大量使用电子设备,使得磁场非常的混乱,以至于地磁传感器非常容易受到干扰。 由于以上算法把地磁传感器一同加入到姿态的测定中,并基本给予了地磁传感器与加速度传感器同样的加权,导致地磁传感器一旦被干扰,会对姿态产生地球重力突然被干扰一样的结果。。。对姿态的测量是毁灭性的。 综上,考虑到磁场的不稳定性,必须对地磁传感器进行降权处理,使得他对姿态的影响变小。 于是设计了以下的算法。 将磁场传感器的数据在姿态角度中剔除,更新姿态的俯仰角(PITCH)以及横滚角(ROLL)的时候只使用加速度传感器以及陀螺仪(角速度传感器)。 只在计算偏航角的(YAW)的时候使用磁场传感器。也就是只使用磁场传感器作为一个电子指南针,定位整个姿态在水平面旋转的角度。这样设计,让磁场传感器只影响姿态中的一个数值,减少了磁场的权重,即使磁场收到干扰,也不会导致姿态骤变,使得四轴坠机。 在对YAW进行计算的时候使用了如下函数。 eulerAngleRaw.yaw = 0.9 * (eulerAngleRaw.yaw - gzF*2*halfT) + 0.1 * angleMagYaw; 此处的0.9和0.1是可以变动的但他们相加应该为1,此处为一个最简单的1阶低通滤波器,增加0.1则是增大截止频率。 算法的流程图是这样的: 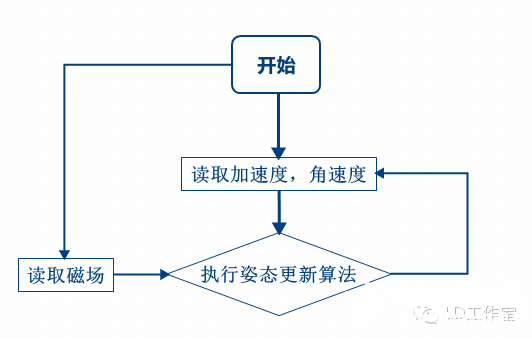 新的姿态更新算法是这样的 [mw_shl_code=applescript,true]void AHRSupdate(float gxf, float gyf, float gzf, float axf, float ayf, float azf, float mxf, float myf, float mzf) { double norm; float vx, vy, vz; float ex, ey, ez; float halfT; //采样周期的一半 // 辅助变量,以减少重复操作数 float q0q0 = q0*q0; float q0q1 = q0*q1; float q0q2 = q0*q2; float q0q3 = q0*q3; float q1q1 = q1*q1; float q1q2 = q1*q2; float q1q3 = q1*q3; float q2q2 = q2*q2; float q2q3 = q2*q3; float q3q3 = q3*q3; // 测量归一化 norm = invSqrt(axf*axf + ayf*ayf + azf*azf); axf = axf * norm; //向量a 为传感器重力 飞行器分量 ayf = ayf * norm; azf = azf * norm; // norm = invSqrt(mxf*mxf + myf*myf + mzf*mzf); // 向量m 为传感器磁场 飞行器分量 // mxf = mxf * norm; // myf = myf * norm; // mzf = mzf * norm; // 计算参考磁通方向 // hx = 2*mxf*(0.5 - q2q2 - q3q3) + 2*myf*(q1q2 - q0q3) + 2*mzf*(q1q3 + q0q2); //向量h 为磁场通过旋转以后 参考系分量 // hy = 2*mxf*(q1q2 + q0q3) + 2*myf*(0.5 - q1q1 - q3q3) + 2*mzf*(q2q3 - q0q1); // hz = 2*mxf*(q1q3 - q0q2) + 2*myf*(q2q3 + q0q1) + 2*mzf*(0.5 - q1q1 - q2q2); // bx = 1.0f/invSqrt((hx*hx) + (hy*hy)); //原则上应该只有X向的分量 ex的磁场传感器部分误差就是由此式产生。 // bz = hz; //估计方向的重力和磁通(V和W) //反向使用 四元数 及把a用-a替换。 vx = 2*(q1q3 - q0q2); //v为把重力反向旋转到飞行器参考系时重力的向量 vy = 2*(q0q1 + q2q3); vz = q0q0 - q1q1 - q2q2 + q3q3; // wx = 2*bx*(0.5 - q2q2 - q3q3) + 2*bz*(q1q3 - q0q2); // w为把磁场反向旋转到飞行器参考系时磁场的向量 // wy = 2*bx*(q1q2 - q0q3) + 2*bz*(q0q1 + q2q3); // wz = 2*bx*(q0q2 + q1q3) + 2*bz*(0.5 - q1q1 - q2q2); // 错误是跨产品的总和之间的参考方向的领域和方向测量传感器 //建立误差函数 向量的外积 // ex = (ayf*vz - azf*vy) + (myf*wz - mzf*wy); // ey = (azf*vx - axf*vz) + (mzf*wx - mxf*wz); // ez = (axf*vy - ayf*vx) + (mxf*wy - myf*wx); ex = (ayf*vz - azf*vy); ey = (azf*vx - axf*vz); ez = (axf*vy - ayf*vx); halfT=getCurrentTime(timer4); if (halfT>0.05)halfT=0; // printf("%f\n\r",halfT); if(ex != 0.0f && ey != 0.0f && ez != 0.0f) { // 积分误差比例积分增益 exInt = exInt + ex*Ki*(halfT); eyInt = eyInt + ey*Ki*(halfT); ezInt = ezInt + ez*Ki*(halfT); // 调整后的陀螺仪测量 gxf = gxf + Kp*ex + exInt; gyf = gyf + Kp*ey + eyInt; gzf = gzf + Kp*ez + ezInt; } // halfT=getCurrentTime(); // printf("%f \n\r", halfT); // 整合四元数率和归一化 //龙格-库格法 q0 = q0 + (-q1*gxf - q2*gyf - q3*gzf)*halfT; q1 = q1 + (q0*gxf + q2*gzf - q3*gyf)*halfT; q2 = q2 + (q0*gyf - q1*gzf + q3*gxf)*halfT; q3 = q3 + (q0*gzf + q1*gyf - q2*gxf)*halfT; // 归一化四元数 norm = invSqrt(q0*q0 + q1*q1 + q2*q2 + q3*q3); q0 = q0 * norm; q1 = q1 * norm; q2 = q2 * norm; q3 = q3 * norm; }[/mw_shl_code] 与第二篇相比,算法中注释掉了所有与磁场有关的部分。 姿态更新后,用如下语句与磁场传感器计算出来的YAW(偏航角)进行混合 eulerAngleRaw.yaw = 0.9 * (eulerAngleRaw.yaw - gzF*2*halfT) + 0.1 * angleMagYaw; 经过检验,该算法姿态稳定,准确,变化迅速,YAW的值也能长期保证稳定,能为四轴飞行器提供很好的姿态数据 |
 活跃会员
活跃会员



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








