|
33485| 25
|
[项目] 圆乎乎的Canbot机器人 |

本帖最后由 virtualwiz 于 2016-5-8 16:45 编辑  腾讯视频传送门:http://v.qq.com/page/p/a/9/p0198ab7ia9.html 这个小项目为你介绍怎样使用3D打印部件和ATTiny85单片机,制作一个圆筒形的遥控小车。 Step 1: 准备材料 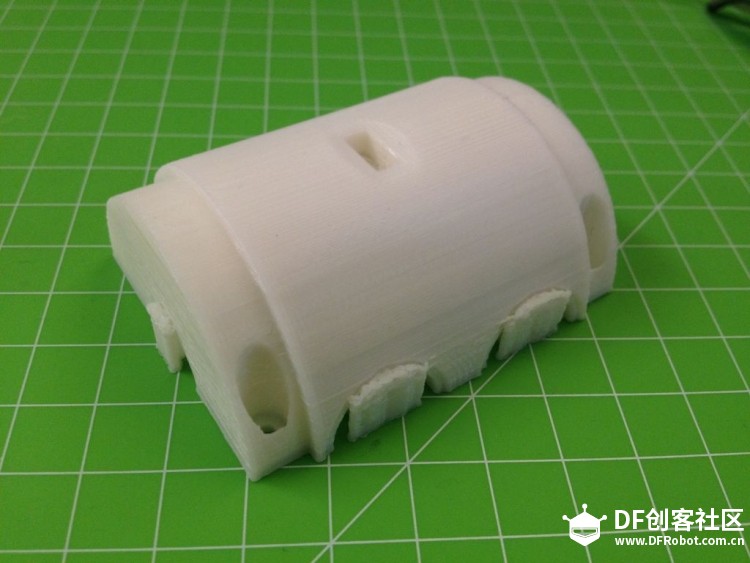  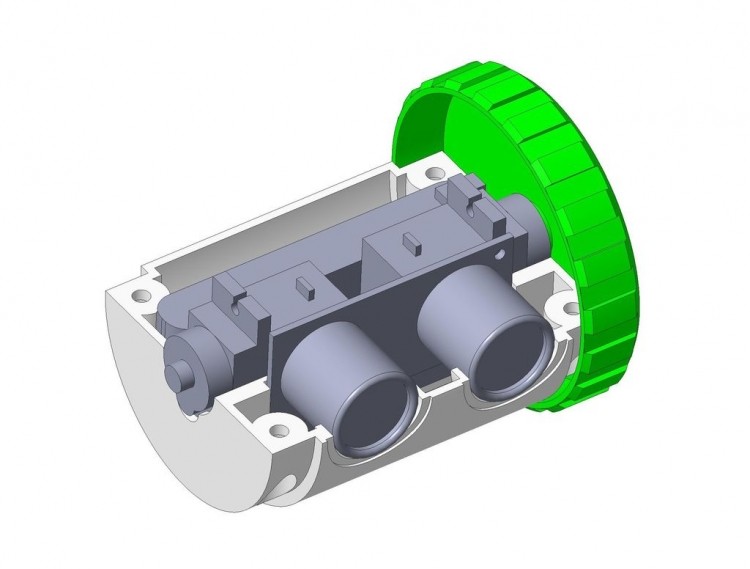 部件列表:
打印时,使平的一片向下,并启用支撑。根据你的舵机、和打印机的区别,你可能需要稍稍缩放一下这个模型。  canbot.zip canbot.zipStep 2: 电路连接 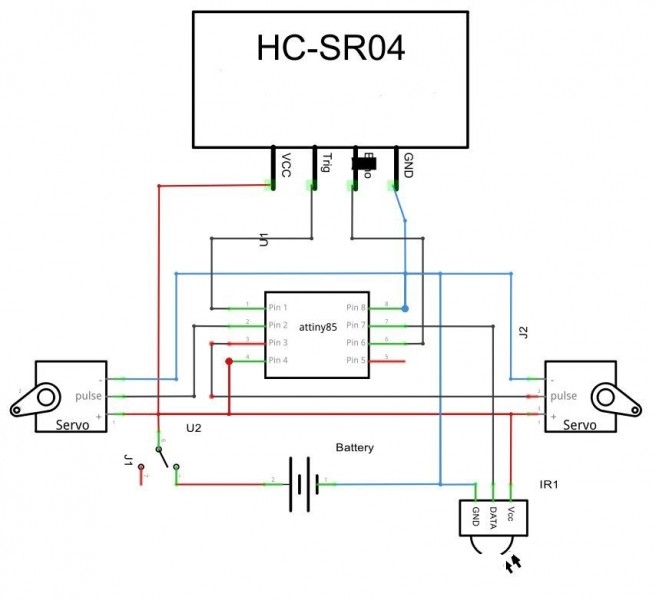 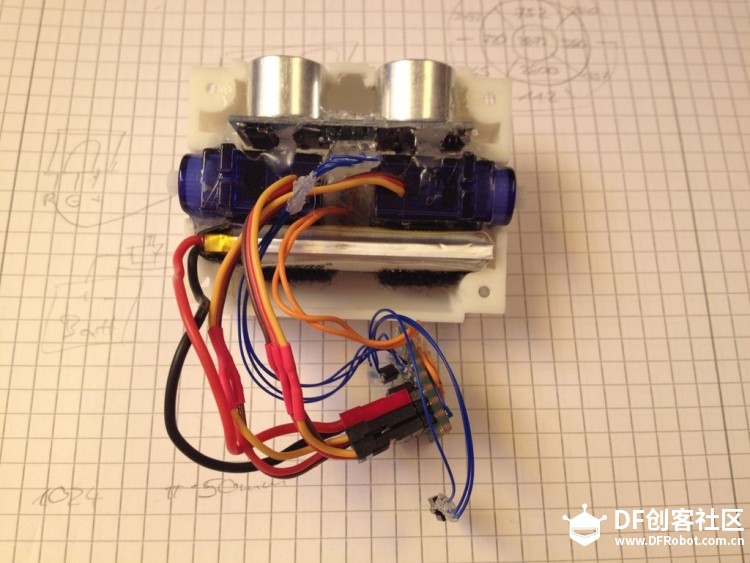 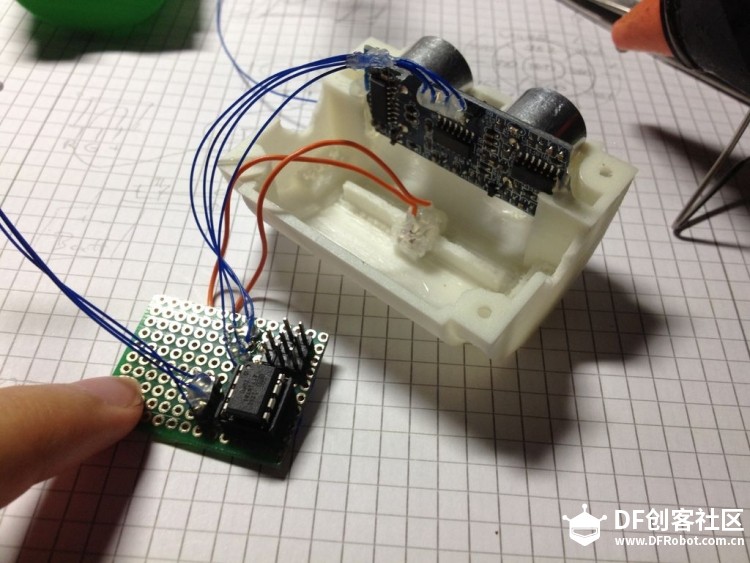 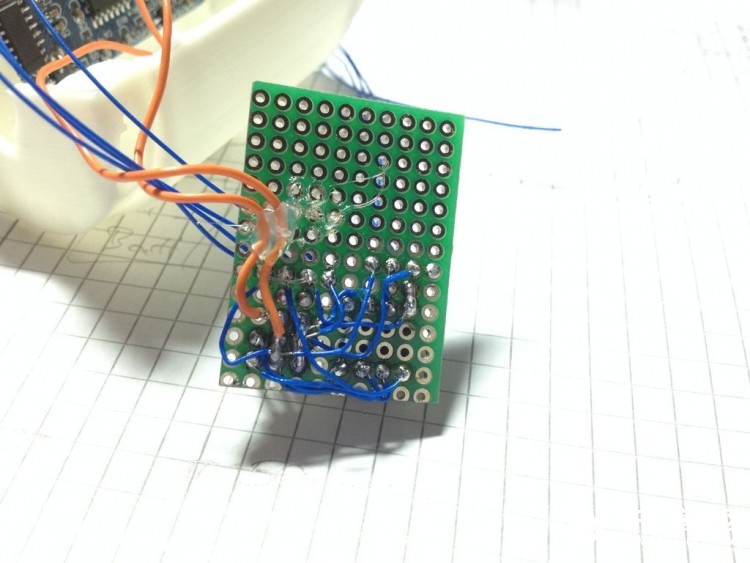 将舵机改造一下,使它可以360°连续旋转。 然后按照图示连接电路。需要用一块洞洞板和一些导线。 Step 3: 写入程序 你可以利用Arduino将程序写入芯片。写ATTiny芯片的方法比较特殊,可以参考 http://highlowtech.org/?p=1695 你可以将程序下载到一块Arduino中,使用Serial.print()函数,查看你使用的按钮键值。 Canbottiny_source.zipStep 4: 组装 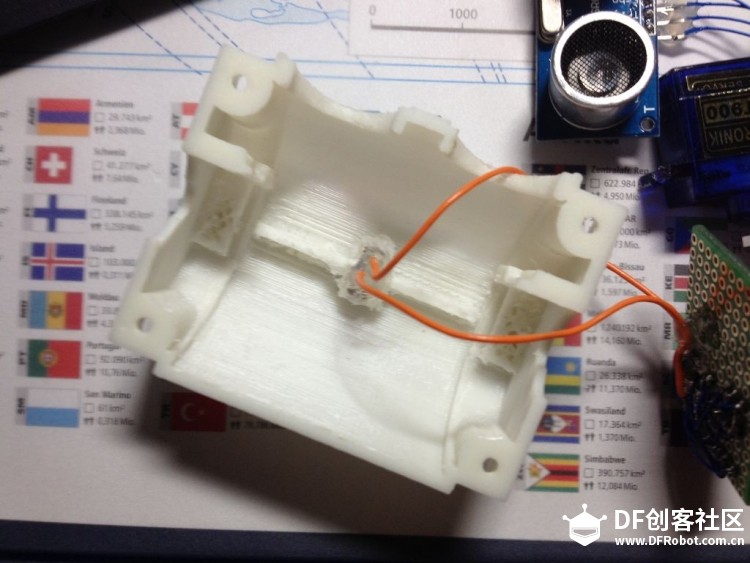 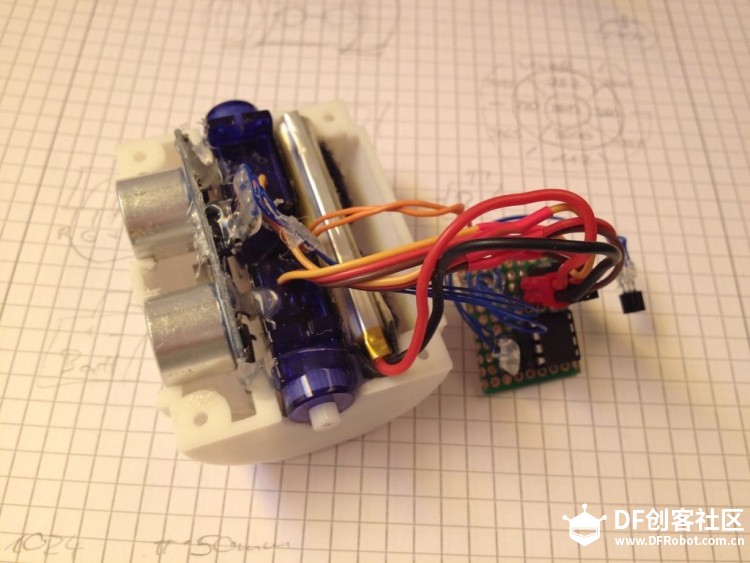 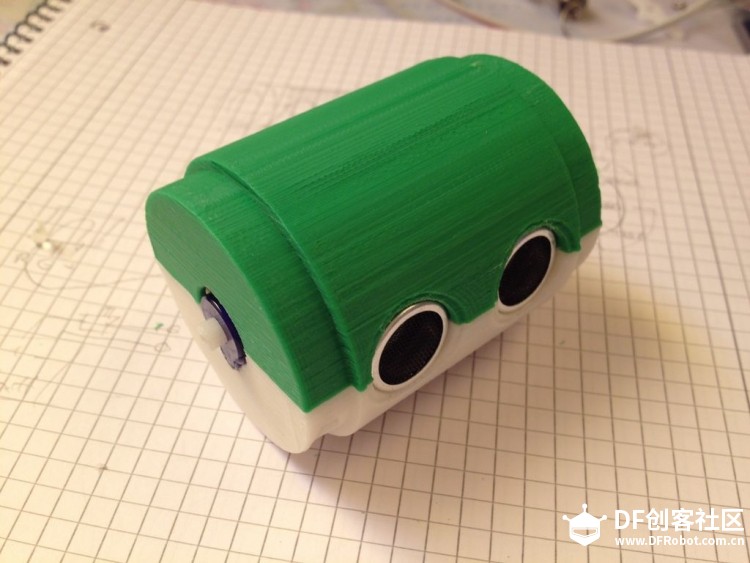 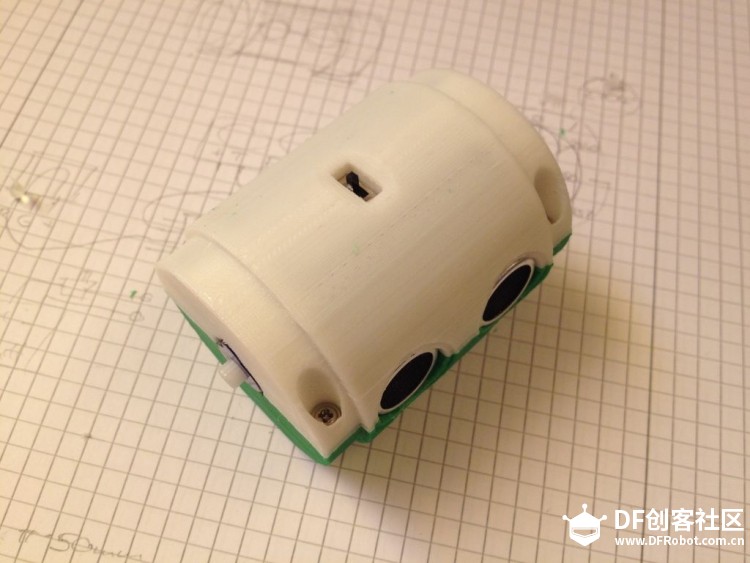 用热熔胶将部件固定在外壳内部。外壳的两部分可以用舵机附带的螺丝固定起来。 翻译自CoreTechRobotics 在instructables上的作品ATTiny Canbot。此作品使用CC开源协议。 |
 活跃会员
活跃会员
 老版主限定
老版主限定
 蘑菇人
蘑菇人



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶










