|
12949| 0
|
[创客活动] 舵机的结构构成 |
|
什么是舵机呢?首先,“舵机”这个名号其实是一个俗称,是那些玩航模、船模的人起的名字,因为这种电机常被用于舵面控制。舵机其实就是一个简单的伺服电机系统,也是最常见的伺服电机系统。 舵机是一种位置(角度)伺服的驱动器,适用于需要角度不断变化并可以保持的控制系统,由下壳、控制电路、电机、中壳、齿轮组、轴承以及上壳组成。舵机是一个闭环控制系统。控制电路板接收来自信号线的控制信号,控制电机转动,电机带动一系列齿轮组,减速后传动至输出舵盘。舵机的输出轴与位置反馈电位计相连,舵盘转动的同时带动位置反馈电位计,电位计将输出一个电压信号到控制电路板进行反馈,然后控制电路板根据所在位置决定电机转动的方向和速度,从而达到目标停止。 如果拆开舵机,我们就可以很明显的看出,舵机和步进电机的动力是有着很大区别的,舵机的驱动力来自——直流电机,通过变速齿轮的传动和变速,将动力传输到输出轴,同时,舵机内部都设有角度传感器和控制电路板,用来参与舵机的转动角度的控制和信号的反馈检测工作 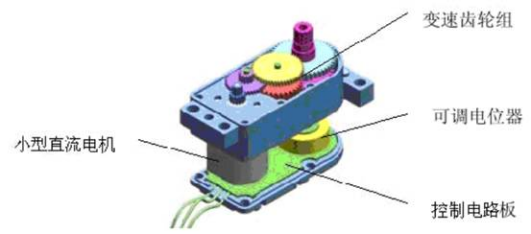 如果还不够直观的话,我们再来看一张舵机实物的拆解图  接下来介绍舵机的结构构成,可以详细分为以下几个部分,它们共同协作以实现舵机的功能: 1. 外壳: l 舵机的外部保护结构,通常由金属或坚固的塑料制成。 l 保护内部组件免受外界环境(如灰尘、水分、冲击等)的损害。 2. 直流电机: l 作为舵机的动力源,提供必要的旋转力矩。 l 直流电机的类型、功率和转速等参数根据舵机的具体应用场景而定。 3. 减速齿轮组: l 位于直流电机和输出轴之间,用于降低电机的转速并放大扭矩。 l 减速齿轮组通常由多级齿轮组成,可以实现较大的扭矩输出和较慢的旋转速度。 l 齿轮的精度和耐磨性对舵机的性能和寿命至关重要。 4. 角度传感器(电位器、磁编码器):。 l 电位器通过其电阻值的变化来反映舵机的角度位置。 l 磁性编码器利用磁场传感器来实现角度测量。 l 当磁编码器旋转时,磁性材料的磁场也会随之改变,传感器会检测到磁场的变化从而输出对应的脉冲信号 l 角度传感器的精度和稳定性直接影响舵机的控制精度和稳定性。 5. 控制驱动电路: l 舵机的核心部分,接收外部接口传来的信号(如PWM信号)和角度传感器反馈的电压值。 l 经过处理后,控制驱动电路驱动直流电机旋转,并通过闭环控制确保舵机能够准确、稳定地工作。 l 控制驱动电路还负责处理电机过流、过热等保护功能,确保舵机的安全运行。 6. 接口线缆: l 用于连接舵机与外部控制系统(如遥控器、计算机等)。 l 接口线缆通常包括电源线、地线、控制信号线等,用于传输电能和控制信号。 7. 舵盘/摇臂: l 连接在舵机的输出轴上,是舵机与外界机械结构相连的部件。 l 舵盘可以将舵机的旋转运动转换为线性运动或角度变化,以适应不同的应用需求。 l 舵盘的位置和角度可以通过外部控制信号进行精确调整。 8. 其他组件: 根据舵机的具体应用场景和性能要求,还可能包括其他组件,如反馈电位器支架、齿轮固定座、轴承等。在性能方面还可根据客户的需求进行定制,例如:防水、耐高温低温 总结: 舵机是一种由外壳、舵盘、直流电机、减速齿轮组、角度传感器、控制驱动电路和接口线缆等部件组成的位置(角度)伺服驱动器。这些部件共同协作,使舵机能够准确、稳定地实现角度变化,并广泛应用于无人机、机器人、生活家电、自动化设备、steam教育、军工航天等领域。在实际应用中,舵机的性能参数(如扭矩、速度、精度等)和接口类型(如指令信号、数字信号等)可以根据具体需求进行选择。  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






