本帖最后由 virtualwiz 于 2016-9-20 20:48 编辑
巡迹车估计是入门Arduino的同学们玩厌了的项目了吧
只要在地上贴个黑线,借助光学传感器和一些控制手段,就可以让小车(或者高大上一些的,Vortex)一路沿着黑线行驶。
简单点的做法,只要用红外反射传感器,电压比较器和几片逻辑器件就可以晃晃悠悠起来
复杂点的做法,可以用一大堆光学传感器,在高性能的单片机上运行PID算法,做出可以竞速的智能车


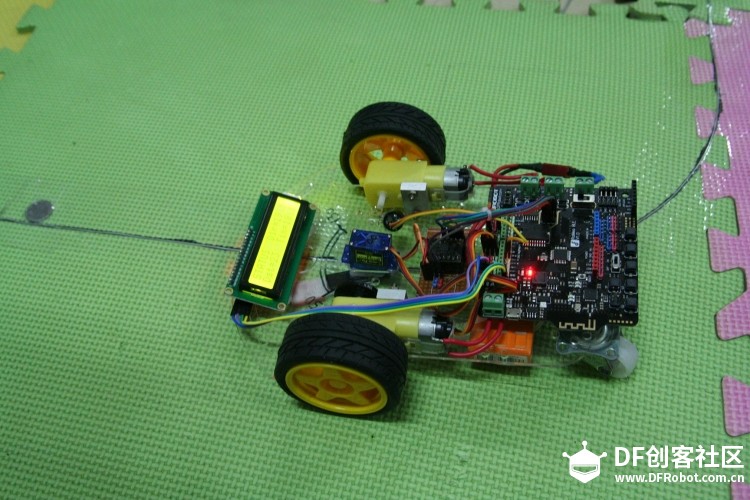
这回我们来做个不一样的巡迹车~~
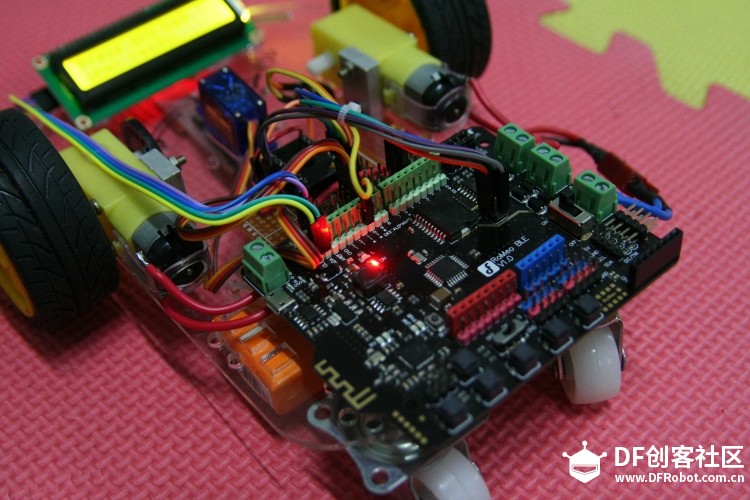
这个小车用到了DFRobot的Romeo BLE控制器,板载蓝牙和电机驱动,做这种项目灰常合适
小车启动后,沿着一根直径1mm的细铁丝慢慢前进。轨道的随机位置会出现一枚硬币,小车巡迹途中如果遇到硬币,会发出报警声。
(参加过某比赛的同学们别笑我:lol)
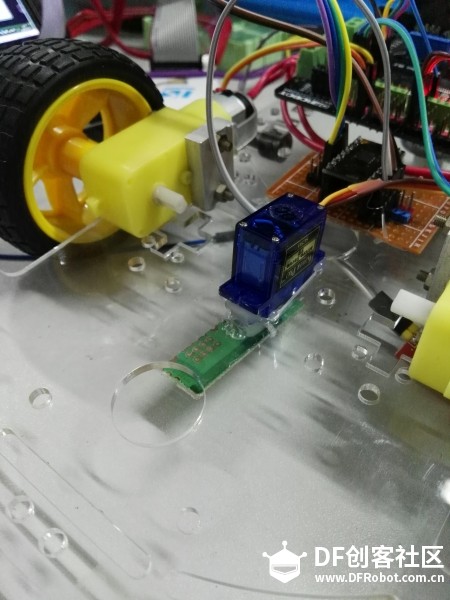 
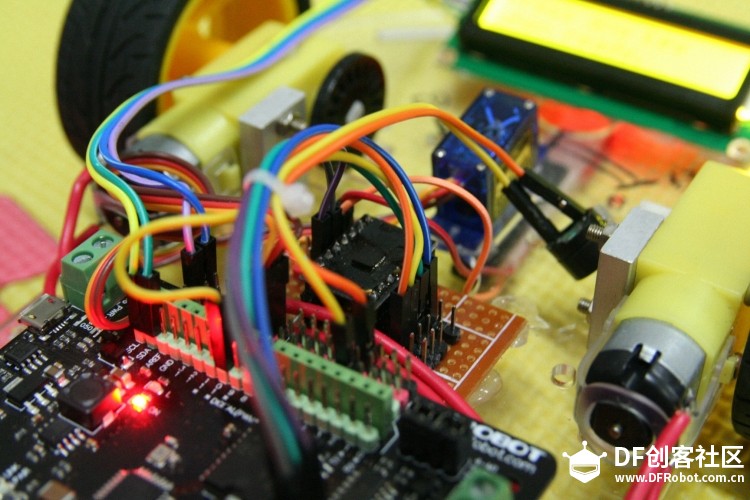
因为要检测的是细铁丝,可以使用TI公司的LDC1000数字电感传感器。
粗略地说,原理大概就是,
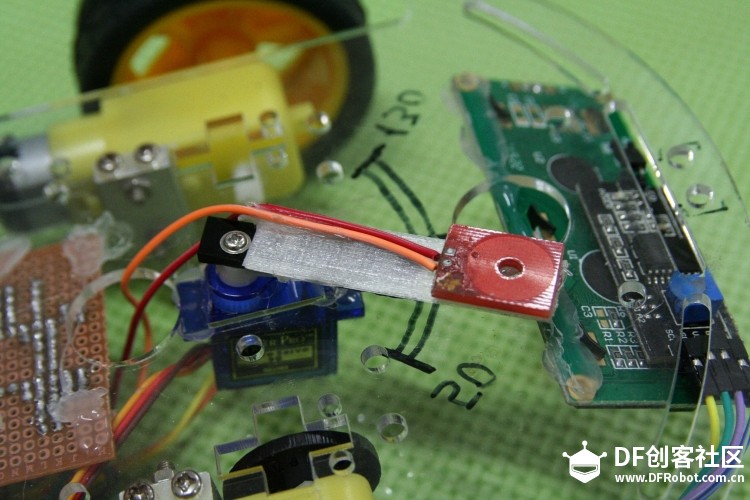
让一个空心的线圈靠近导体,这时导体就充当了线圈的铁芯,线圈的电感就会略微增加。LDC传感器以很高的频率扫描线圈,当电感特性发生了变化,就说明有导体靠近线圈,这就测出了我们需要的信息。
然后找个舵机,把线圈固定在一个杆上,让舵机来回扫动,同时不断读取LDC传感器的数据。这样,哪里测得的信号最强,就是细铁丝最有可能出现的方向,根据这个数值调整车的方向就可以了
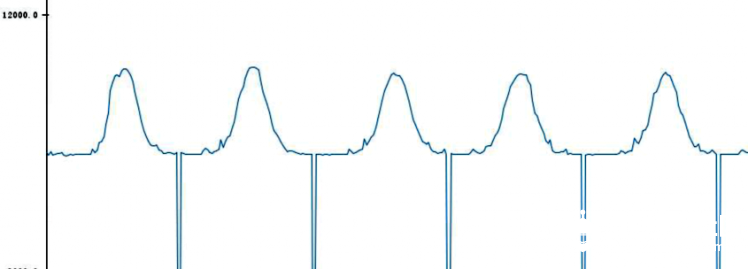
这是舵机扫描过程中用串口绘图器画出的波形,上方峰值的位置就是最可能出现铁丝的位置。

 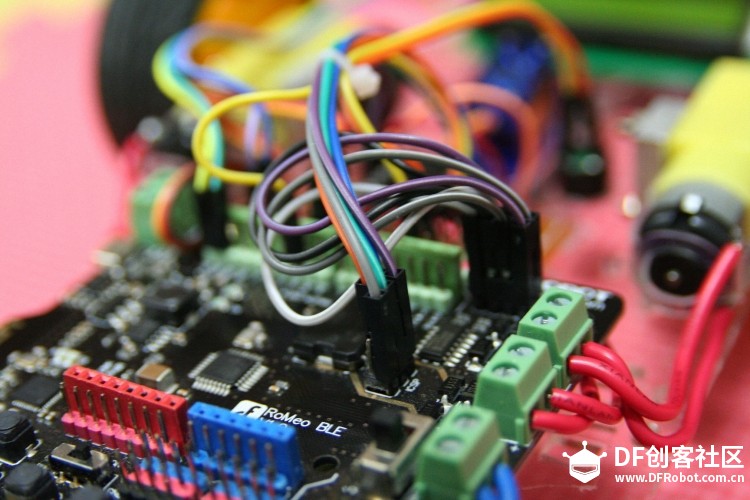
Romeo上的电机驱动跳线使用了一种不同寻常的接法,将右上方的跳线交叉相连,将PWM信号从L298N的DIR引脚送入,经过测试,这种接法可以显著提升直流电机的低转速性能,但是同时会增加驱动芯片和电机的发热量。

送上代码~~据说写代码要规范,别人看到才会舒服。
- <font face="Verdana">
-
- //3rd version
-
- #include <Servo.h>
- #include "SPI.h"
- #include <LiquidCrystal_I2C.h>
- #include <Wire.h>
-
- #define GPIO_MOT_LEFT_EN 5
- #define GPIO_MOT_RIGHT_EN 6
- #define GPIO_MOT_LEFT_DIR 4
- #define GPIO_MOT_RIGHT_DIR 7
- #define GPIO_SENSOR_SERVO 8
- #define GPIO_BUZZER 3
- #define GPIO_KEY A7
- #define GPIO_LED 13
-
- #define NAVI_DISTANCE_K 0.04
- #define NAVI_MOT_PULSEWIDTH 100
-
- #define IDLE_L 127
- #define IDLE_R 127
-
- #define SCAN_STARTPOS 50
- #define SCAN_ENDPOS 130
- #define SCAN_CENTER 90
-
- #define CONTROL_KP 3
- #define CONTROL_RUNSPEED 60
- #define CONTROL_TURNSPEED 50
-
- #define NAVI_TURNTHRE 6
-
- #define SIGNAL_COIN 20000
-
- #define SERVO_SLPTIME 3
-
- #define SCAN_SLPTIME 50
-
- const int CSB = 10;
-
- //Hardware driver
- Servo ScannerArm;
- LiquidCrystal_I2C lcd(0x27,16,2);
-
-
- void SetMotorDuty(byte L,byte R) {
- analogWrite(GPIO_MOT_LEFT_EN,L);
- analogWrite(GPIO_MOT_RIGHT_EN,R);
- }
-
- void Motor_Crank() {
- digitalWrite(GPIO_MOT_LEFT_DIR,HIGH);
- digitalWrite(GPIO_MOT_RIGHT_DIR,HIGH);
- }
-
- void Motor_Standby() {
- digitalWrite(GPIO_MOT_LEFT_DIR,LOW);
- digitalWrite(GPIO_MOT_RIGHT_DIR,LOW);
- }
-
- void GPIO_Init() {
- pinMode(GPIO_MOT_LEFT_EN,OUTPUT);
- pinMode(GPIO_MOT_RIGHT_EN,OUTPUT);
- pinMode(GPIO_MOT_LEFT_DIR,OUTPUT);
-
- pinMode(GPIO_MOT_RIGHT_DIR,OUTPUT);
-
- pinMode(GPIO_BUZZER,OUTPUT);
- pinMode(GPIO_LED,OUTPUT);
- SetMotorDuty(0,0);
- }
-
-
- void Serial_LDCSensor_Init() {
- unsigned int data = 0;
- Serial.begin(9600);
- // start SPI library/ activate BUS
- SPI.begin();
-
- pinMode(CSB, OUTPUT);
- SPI.setBitOrder(MSBFIRST);
- SPI.setDataMode(SPI_MODE0); // CPOL = 0 and CPH = 0 mode 3 also works
- SPI.setClockDivider(SPI_CLOCK_DIV4); // set SCLK @ 4MHz, LDC1000 max is 4MHz DIV2 also works
-
- // set power mode to idle to configure stuff
- digitalWrite(CSB, LOW);
- SPI.transfer(0x0B);
- SPI.transfer(0x00);
- digitalWrite(CSB, HIGH);
- delay(100);
-
- // Set RpMax
- digitalWrite(CSB, LOW);
- SPI.transfer(0x01);
- SPI.transfer(0x0E);
- digitalWrite(CSB, HIGH);
- delay(100);
- // Set RpMin
- digitalWrite(CSB, LOW);
- SPI.transfer(0x02);
- SPI.transfer(0x3B);
- digitalWrite(CSB, HIGH);
- delay(100);
-
- // Set Sensor frequency
- digitalWrite(CSB, LOW);
- SPI.transfer(0x03);
- SPI.transfer(0x94);
- digitalWrite(CSB, HIGH);
- delay(100);
-
- // Set LDC configurationn
- digitalWrite(CSB, LOW);
- SPI.transfer(0x04);
- SPI.transfer(0x17);
- digitalWrite(CSB, HIGH);
- delay(100);
-
- // Set clock configuration
- digitalWrite(CSB, LOW);
- SPI.transfer(0x05);
- SPI.transfer(0x00);
- digitalWrite(CSB, HIGH);
- delay(100);
-
-
- // disable all interrupt modes
- digitalWrite(CSB, LOW);
- SPI.transfer(0x0A);
- SPI.transfer(0x00);
- digitalWrite(CSB, HIGH);
- // set thresh HiLSB value
- digitalWrite(CSB, LOW);
- SPI.transfer(0x06);
- SPI.transfer(0x50);
- digitalWrite(CSB, HIGH);
- delay(100);
- // set thresh HiMSB value
- digitalWrite(CSB, LOW);
- SPI.transfer(0x07);
- SPI.transfer(0x14);
- digitalWrite(CSB, HIGH);
- delay(100);
- // set thresh LoLSB value
- digitalWrite(CSB, LOW);
- SPI.transfer(0x08);
- SPI.transfer(0xC0);
- digitalWrite(CSB, HIGH);
- delay(100);
- // set thresh LoMSB value
- digitalWrite(CSB, LOW);
- SPI.transfer(0x09);
- SPI.transfer(0x12);
- digitalWrite(CSB, HIGH);
- delay(100);
-
- // set power mode to active mode
- digitalWrite(CSB, LOW);
- SPI.transfer(0x0B);
- SPI.transfer(0x01);
- digitalWrite(CSB, HIGH);
- delay(100);
-
- }
-
- void Alarm(byte type) {
- switch(type)
- {
- case 1:
- tone(GPIO_BUZZER,1109,220);
- delay(220);
- tone(GPIO_BUZZER,1245,220);
- delay(220);
- tone(GPIO_BUZZER,1397,220);
- delay(220);
- noTone(GPIO_BUZZER);
- break;
-
- case 2:
- tone(GPIO_BUZZER,1397,220);
- delay(220);
- tone(GPIO_BUZZER,1109,220);
- delay(220);
- tone(GPIO_BUZZER,1661,220);
- delay(220);
- noTone(GPIO_BUZZER);
- break;
-
- case 3:
- tone(GPIO_BUZZER,1109,50);
- delay(50);
- noTone(GPIO_BUZZER);
- break;
-
- case 4:
- tone(GPIO_BUZZER,1397,150);
- delay(150);
- tone(GPIO_BUZZER,1661,150);
- delay(150);
- tone(GPIO_BUZZER,2794,150);
- delay(150);
- tone(GPIO_BUZZER,2217,150);
- delay(150);
- tone(GPIO_BUZZER,2489,150);
- delay(150);
- tone(GPIO_BUZZER,3322,150);
- delay(150);
- }
- }
-
- void Servo_Init() {
- ScannerArm.attach(GPIO_SENSOR_SERVO);
- ScannerArm.write(90);
- }
-
- void Display_Init(){
- lcd.init();
- lcd.backlight();
- //lcd.blink();
- }
-
- bool CoinFoundFlag = false;
-
- int LDC_SingleScan() {
- unsigned int val = 0;
- unsigned int dataLSB = 0;
- unsigned int dataMSB = 0;
- unsigned int proximitydata = 0;
-
- // Read proximity data LSB register
- digitalWrite(CSB, LOW);
- SPI.transfer(0xA1); // 0x80 + 0x21
- dataLSB = SPI.transfer(0x00);
- digitalWrite(CSB, HIGH);
- delay(SERVO_SLPTIME);
-
- // Read proximity data MSB register
- digitalWrite(CSB, LOW);
- SPI.transfer(0xA2); // 0x80 + 0x22
- dataMSB = SPI.transfer(0x00);
- digitalWrite(CSB, HIGH);
- delay(SERVO_SLPTIME);
-
- proximitydata = ((unsigned int)dataMSB << 8) | (dataLSB);// combine two registers to form 16bit resolution proximity data
- if(proximitydata == 0) Alarm(3);
- Serial.println(proximitydata);
- // Serial.print("\t");
- return proximitydata;
- }
-
- byte LDC_AutoScan() {
- static signed char ScanDirection = 1;
- int MaxSignalOnPos = 0;
- int MaxSignal = 0;
- int LDCReadBuf = 0;
- int Start;
- int End;
- if(ScanDirection == 1)
- {
- Start = SCAN_STARTPOS;
- End = SCAN_ENDPOS;
- }
- else
- {
- End = SCAN_STARTPOS;
- Start = SCAN_ENDPOS;
- }
- for(int CurrentPos = Start ; CurrentPos != End ; CurrentPos += ScanDirection)
- {
- LDCReadBuf = LDC_SingleScan();
- ScannerArm.write(CurrentPos);
- if(LDCReadBuf > MaxSignal)
- {
- MaxSignal = LDCReadBuf;
- MaxSignalOnPos = CurrentPos;
- }
- }
- ScanDirection = -ScanDirection;
- if(MaxSignal >= SIGNAL_COIN) {
- Alarm(4);
- CoinFoundFlag = true;
- }
- return MaxSignalOnPos;
- }
-
- int LDCValueMax = 1;
- int LDCValueMin = 0;
-
- void LDC_StartCalibration()
- {
-
- }
-
- void LCD_Format() {
- lcd.setCursor(0,0);
- lcd.print("STATUS Dir= ");
- lcd.setCursor(0,1);
- lcd.print("Dst= Tim= ");
- }
-
- void LCD_ShowInfo(int dir,int dst,int time) {
- lcd.setCursor(12,0);
- lcd.print(dir);
- lcd.setCursor(4,1);
- lcd.print(dst);
- lcd.setCursor(12,1);
- lcd.print(time);
- }
-
- byte SpeedWidthLimit(int orig){
- byte dest = orig;
- if(orig >= 255) dest = 254;
- if(orig <= 0 ) dest = 1;
- return dest;
- }
-
- int Run_Time;
-
- void setup() {
- Serial_LDCSensor_Init();
- GPIO_Init();
- Servo_Init();
- Display_Init();
- lcd.setCursor(0,0);
- lcd.print("Press any key");
- lcd.setCursor(0,1);
- lcd.print(" [PLL MODE]");
- Alarm(1);
- while(analogRead(GPIO_KEY) > 900);
- Alarm(2);
- delay(1000);
- SetMotorDuty(IDLE_L,IDLE_R);
- delay(1000);
- Run_Time = millis() / 1000;
- // while(1) LDC_SingleScan();
- }
-
- int Distance = 0;
- void loop() {
- int Duty_Left;
- int Duty_Right;
- int PeakAngle = LDC_AutoScan() - 90;
- if(PeakAngle <= NAVI_TURNTHRE && PeakAngle >= -NAVI_TURNTHRE)
- {
- Duty_Left = IDLE_L + CONTROL_RUNSPEED + (CONTROL_KP * PeakAngle);
- Duty_Right = IDLE_R + CONTROL_RUNSPEED - (CONTROL_KP * PeakAngle);
- }
- else
- {
- Duty_Left = IDLE_L + CONTROL_TURNSPEED + (CONTROL_KP * PeakAngle);
- Duty_Right = IDLE_R + CONTROL_TURNSPEED - (CONTROL_KP * PeakAngle);
- }
- Motor_Crank();
- if(CoinFoundFlag)
- {
- SetMotorDuty(IDLE_L + CONTROL_RUNSPEED + 20,IDLE_R + CONTROL_RUNSPEED + 20);
- CoinFoundFlag = false;
- }
- else
- {
- SetMotorDuty(SpeedWidthLimit(Duty_Left),SpeedWidthLimit(Duty_Right));
- }
-
- Distance += NAVI_DISTANCE_K * CONTROL_RUNSPEED;
-
- delay(NAVI_MOT_PULSEWIDTH);
-
- SetMotorDuty(IDLE_L,IDLE_R);
- LCD_Format();
- LCD_ShowInfo(PeakAngle , Distance , millis() / 1000 - Run_Time);
- Motor_Standby();
- //Serial.println(LDC_AutoScan());
- }
-
-
- </font>
|

 活跃会员
活跃会员
 老版主限定
老版主限定
 蘑菇人
蘑菇人



 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






