|
8440| 1
|
[入门教程] 【掌控-好搭】11:体感控制的彩灯 |
|
【掌控-好搭】11:体感控制的彩灯 【学习目标】 1、初步认识加速度计 2、制作体感控制彩灯 【小探索】 首先认识一下掌控的板载加速度传感器。 1、显示板载加速度传感器的值 程序下载,体验一下掌控板稆个方向上的加速度值,寻找XYZ三个方向及读数范围: 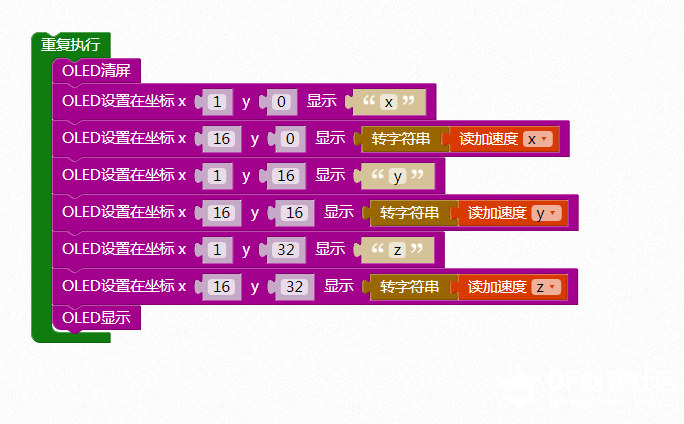 记录在下面: X____________________________ y____________________________ z____________________________ 了解这些,对后面编程项目很有用哦。 【资料】掌控的加速度计用的是笛右手坐标系。 (传说从高中到大学的课堂上,)教材中所涉及的立体几何基本都是右手系。在原本的二维直角坐标系,再添加一个垂直于 x-轴,y-轴的坐标轴,称为 z-轴,这z-轴与 x-轴,y-轴相互正交于原点。 如下图所示符合右手定则的称之为右手系,反之则为左手系。 右手定则:以右手握住z轴,当右手的四指从正向x轴以π/2角度转向正向y轴时,大拇指的指向就是z轴的正向。 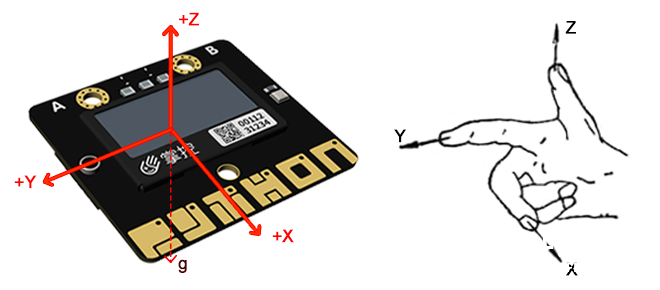 【掌控体感灯】 下面只给一部分示例  完成上面积序并下载。 【扩展练习】 尝试完成其它体感创意。 |
 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖









