|
9322| 1
|
[教程] AppInventor+乐高Ev3技术文档 |
|
原文地址:http://iot.appinventor.mit.edu/#/legoev3/legoev3intro。原文是纯文字,翻译过来后增加了中英文编辑界面戴图,方便对照查看。 Ev3Motor马达 原文地址:http://ai2.appinventor.mit.edu/r ... orms.html#Ev3Motors 原文为纯文字,译文增加了中文及英文代码块方便参考学习。 为乐高MINDSTORMS EV3机器人提供高级和低级接口的组件,具有可控制电机的功能。 属性 BluetoothClient蓝牙客户端 用于通信的BluetoothClient组件。 必须在Designer中 MotorPorts马达端口号 电机连接的马达端口。端口由一系列字母指定。 必须在Designer中设置 WheelDiameter车轮直径 安装在电机上的轮子直径,以厘米为单位。 ReverseDirection方向倒转 电机的方向是否倒转。 EnableSpeedRegulation启用转速校准 如果启用了速度校准,机器人会调节功率以保持匀速。 StopBeforeDisconnect断开前停机 断开前是否停止电机。 TachoCountChangedEventEnabled启用角度改变事件 当角度改变时是否触发TachoCountChanged事件。 方法 RotateIndefinitely(power数字型) 开始旋转电机。 RotateInTachoCounts(power数字型, tachoCounts数字型, useBrake布尔型) 电机持续转动一段角度。 RotateInDuration(power数字型, milliseconds数字型, useBrake布尔型) 在一段时间内旋转电机 RotateInDistance(power数字型, distance数字型, useBrake布尔型)  电机转动一段距离。 RotateSyncIndefinitely(power数字型, turnRatio数字型)  同步转动电机。 RotateSyncInDistance(power数字型, distance数字型, turnRatio数字型, useBrake布尔型)  电机同步转动一段距离(以cm为单位)。 RotateSyncInDuration(power数字型, milliseconds数字型, turnRatio数字型, useBrake布尔型)  电机同步转动一段时间 RotateSyncInTachoCounts(power数字型, tachoCounts数字型, turnRatio数字型, useBrake布尔型)  将电机同步转动一段角度。 Stop(useBrake布尔型)  停止电机 ToggleDirection ()  切换电机的转动方向。 ResetTachoCount ()  重置角度。 GetTachoCount ()  取得当前角度。  Ev3ColorSensor颜色传感器 原文地址:http://ai2.appinventor.mit.edu/reference/components/legomindstorms.html#Ev3Ev3ColorSensor 原文为纯文字,译文增加了中文及英文代码块方便参考学习。 为乐高MINDSTORMS EV3机器人颜色传感器提供高级接口的组件。 属性 BluetoothClient蓝牙客户端 用于通信的BluetoothClient组件。 必须在Designer中设置 SensorPort传感器端口 传感器连接的端口号。 必须在Designer中设置 BottomOfRange下限范围 用于BelowRange,WithinRange和AboveRange事件中范围的下限值。 TopOfRange上限范围 用于BelowRange,WithinRange和AboveRange事件中范围的上限值。 BelowRangeEventEnabled启用下限事件 当亮度值低于BottomOfRange下限范围时,是否触发BelowRange超出下限事件。 WithinRangeEventEnabled启用上限事件 当亮度值在BottomOfRange下限范围和TopOfRange上限范围之间时,是否触发WithinRange未超限事件。 AboveRangeEventEnabled启用范围内事件 当亮度值高于TopOfRange上限范围时,是否触发AboveRange超出上限事件。 ColorChangedEventEnabled启用颜色变化事件 当Mode属性设置为“color”并且检测到的颜色发生变化时,是否触发ColorChanged颜色被改变事件。 Mode模式 获取当前的传感器模式。 方法 GetLightLevel () 获取颜色值 它以百分比形式返回亮度值,或者在无法读取亮度值时返回-1。 GetColorCode () 获取颜色代码 它返回0到7的颜色代码,对应于无颜色,黑色,蓝色,绿色,黄色,红色,白色和棕色。 GetColorName () 获取颜色名称 返回“无颜色”,“黑色”,“蓝色”,“绿色”,“黄色”,“红色”,“白色”,“棕色”的颜色名称。 SetColorMode () 设为颜色侦测模式 进入颜色侦测模式。 SetReflectedMode () 设为反射光模式 设置传感器为反射光的工作模式。 SetAmbientMode () 设为环境光模式 设置传感器为环境光的工作模式。  Ev3GyroSensor陀螺仪传感器
为乐高MINDSTORMS EV3机器人上的陀螺仪传感器提供高级接口的组件。 属性 BluetoothClient蓝牙客户端 用于通信的BluetoothClient组件。 必须在Designer中设置 SensorPort 传感器端口 传感器连接的端口号。 必须在Designer中设置 Mode 模式 传感器模式可以是“速率”或“角度”,分别对应于SetAngleMode或SetRateMode。 SensorValueChangedEventEnabled 启用传感器数值改变事件 传感器值更改时是否触发SensorValueChanged传感器数值改变事件。 方法 GetSensorValue () 取得传感器值 根据当前模式返回当前角度或旋转速度,如果无法从传感器读取值,则返回-1。 SetAngleMode () 设为角度模式 测量传感器的方向。 SetRateMode () 设为轴加速度模式 测量传感器的角速度。  Ev3TouchSensor接触传感器 为乐高MINDSTORMS EV3机器人接触传感器提供高级接口的组件。 属性 BluetoothClient蓝牙客户端 用于通信的BluetoothClient组件。 必须在Designer中设置 SensorPort传感器端口 传感器连接的传感器端口号。 必须在Designer中设置 PressedEventEnabled 启用触碰事件 按下触动传感器时是否触发Pressed被压紧事件。 ReleasedEventEnabled 启用释放事件 松开触动传感器是否Released被松开事件。 方法 IsPressed () 检查是否按下触动传感器 如果按下触动传感器,则返回true。  为乐高MINDSTORMS EV3机器人上的超声波传感器提供高级接口的组件。 属性 BluetoothClient 用于通信的BluetoothClient组件。 必须在Designer中设置 SensorPort 传感器端口 传感器连接的端口号。 必须在Designer中设置 BottomOfRange 下限范围 用于BelowRange,WithinRange和AboveRange事件中范围的下限值。 TopOfRange 上限范围 用于BelowRange,WithinRange和AboveRange事件中范围的上限值。 BelowRangeEventEnabled 启用超下限事件 当距离低于BottomOfRange时,是否触发BelowRange超下限事件。 WithinRangeEventEnabled 启用范围内事件 当在BottomOfRange和TopOfRange之间的距离时,是否触发WithinRange范围内事件。 AboveRangeEventEnabled启用超上限事件 当距离超过TopOfRange时是否应触发AboveRange超上限事件。 Unit 距离单位,可以是“cm”或“inch”。 方法 GetDistance () 获取距离 以厘米为单位返回当前距离,值介于0和254之间,如果无法读取距离,则返回-1。 SetCmUnit () 设为厘米为单位 以厘米为单位测量距离。 SetInchUnit () 设为英寸单位 以英寸为单位测量距离。  Ev3Sound声音传感器 为乐高MINDSTORMS EV3机器人提供高级接口的组件,提供发声功能。 属性 BluetoothClient蓝牙客户端 用于通信的BluetoothClient组件。 必须在Designer中设置 方法 PlayTone(音量,频率,毫秒数) 让乐高机器人播放音调。 StopSound () 关闭声音 关闭乐高机器人上的任何声音。  Ev3UI绘图 一个为LEGO MINDSTORMS EV3机器人提供高级接口的组件,具有在EV3屏幕上绘制图形的功能。 属性 BluetoothClient蓝牙客户端 用于通信的BluetoothClient组件。 必须在Designer中设置 方法 DrawPoint (number color, number x, number y) 画点(颜色, x坐标, y坐标) 在屏幕上画一个点。  DrawIcon (number color, number x, number y, number type, number no) 画图标(颜色,x坐标,y坐标,类别,编号) 在屏幕上绘制内置图标。  DrawLine (number color, number x1, number y1, number x2, number y2) 画线(颜色,x1,y1,x2,y2) 在屏幕上画一条线。  DrawRect (number color, number x, number y, number width, number height, boolean fill) 画矩形(颜色,x坐标,y坐标,宽度,高度,填充) 在屏幕上绘制一个矩形。  DrawCircle (number color, number x, number y, number radius, boolean fill) 画圆(颜色,坐标x,坐标y,半径,填充) 在屏幕上画一个圆圈。 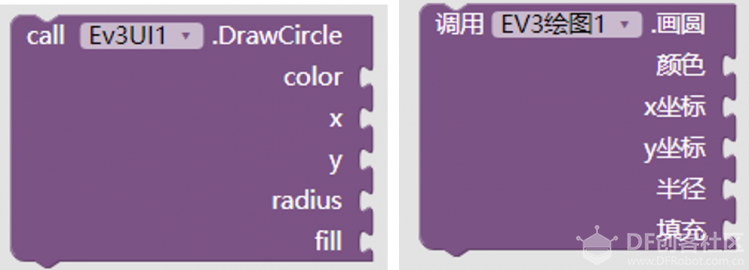 FillScreen (number color)填充屏幕(颜色) 用某种颜色填充屏幕。  Ev3Commands命令 为乐高MINDSTORMS EV3机器人提供低级接口的组件,具有向EV3机器人发送系统或直接命令的功能。 属性 BluetoothClient蓝牙客户端 用于通信的BluetoothClient组件。 必须在Designer中设置 方法 KeepAlive (minutes) 设定保持时间(分钟数) 让EV3停止运行一段时间。 GetBatteryVoltage () 取得电池电压 获取电池电压。 GetBatteryCurrent () 取得电池电流 获取电池电流。 GetOSVersion () 获取操作系统版本 获取EV3上的操作系统版本。 GetOSBuild () 获取操作系统构建版本(Build) 在EV3上获得操作系统版本。 GetFirmwareVersion () 获取固件版本 获取EV3上的固件版本。 GetFirmwareBuild () 获取固件构建版本(Build) 获取EV3上的固件版本。 GetHardwareVersion () 取得硬件版本 获取EV3的硬件版本。 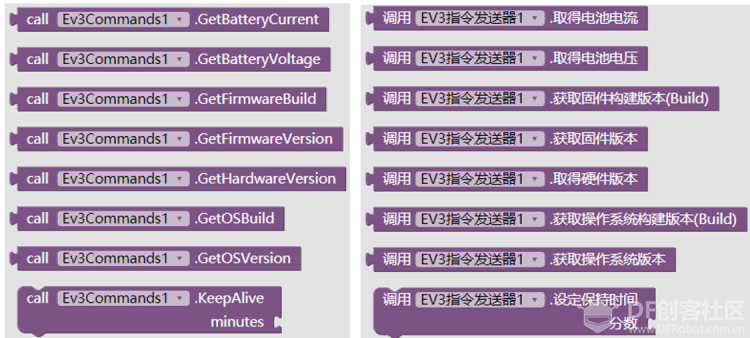 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 版主限定
版主限定
 创作达人
创作达人
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 星球译员
星球译员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






