|
43821| 4
|
[项目分享] Mind+人工智能之智能停车场(功能实现) |
|
本帖最后由 Randy- 于 2019-12-6 09:52 编辑 在之前的帖子里尝试了车牌识别功能,体验很好,那么这回我们就来实现一个停车场的功能吧~ 之前的帖子:Mind+人工智能之智能停车场(功能初探)https://mc.dfrobot.com.cn/thread-299899-1-1.html 这里使用的版本依旧是v1.6.1 那么就开始吧 首先,我们先要对停车场进行需求和问题分析。 1、我想要有一个实际的演示效果,所以呢需要有硬件配合 2、因为图片识别是在实时模式下的,方便起见我需要两端配合(一端在实时模式下监测,另一端执行开关闸门的功能) 3、两端配合的话就需要主控之间可以通讯,那么从方便使用的角度来看就是Micro:bit比较方便 4、实际停车场是有两个摄像头的(入口一个、出口一个)但是我只有一个摄像头,所以计划设计一个类似云台的功能 5、停车场的类型也有很多不同,我想到的有两种,一种停车场是通过购买车位进入的,进入停车场只检查你是否在停车场有车位,有就放行;另一种是计时收费的停车场,计算进入和离开的时间收费。 那么根据分析,先列一个硬件清单 清单: Micro:bit主控板 X2 micro:bit 电机驱动扩展板 X1 超声波传感器 X2 180°舵机 X3 设计思路 根据分析,设计思路如下: 1、两块bit板,一块接在电脑上通过实时模式发送指令,我们叫他发送端;一块通过扩展板控制其他硬件,我们叫他执行端。 2、此次制作的停车场规则参考私有停车位,即购买停车位,停车场仅对购买过的人开放。 3、发送端仅有bit板单板,通过无线发送讯息给执行端。 4、由于只有一个摄像头,所以使用舵机让其两头旋转,通过超声波传感器检测出口和入口哪侧来车了就向对应方向旋转。 5、可以利用IOT平台对停车场车辆进入进行记录。(模拟真实情况,可以记录车辆什么时间进出) 6、执行端部分使用两个舵机控制入口和出口的门闸。 开始制作 分为发送端和执行端两组程序。 我们先做执行端,因为比较简单。  执行端程序 完整程序 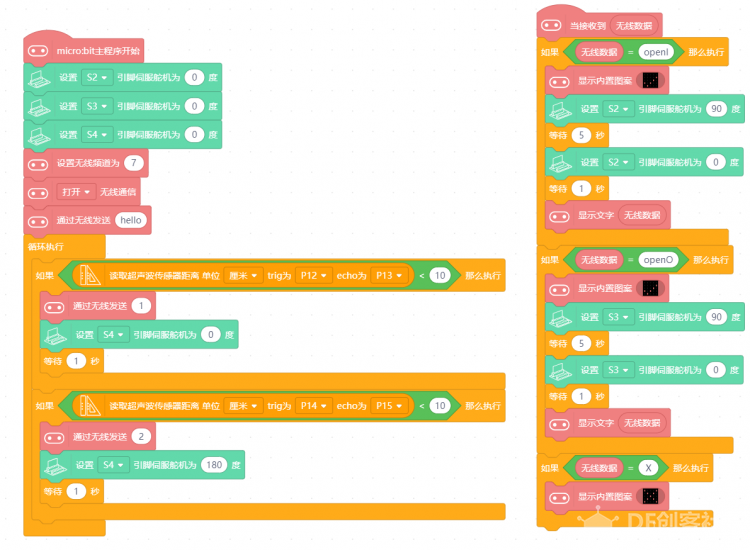 程序解析 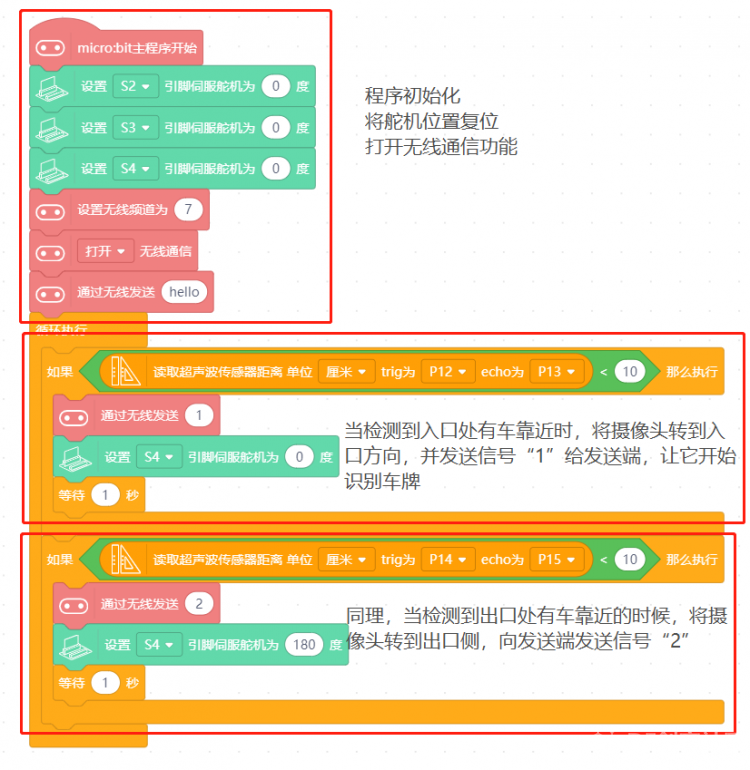  这样接收端程序就完成了 接线 三个舵机分别接到S2\S3\S4接口,S2舵机对应入口门闸开关,S3舵机对应出口门闸开关,而S4舵机对应摄像头旋转舵机。超声波分别接到P12、13口用来做入口检测,P14、15口用来做出口检测。 发送端程序 完整程序  程序解析  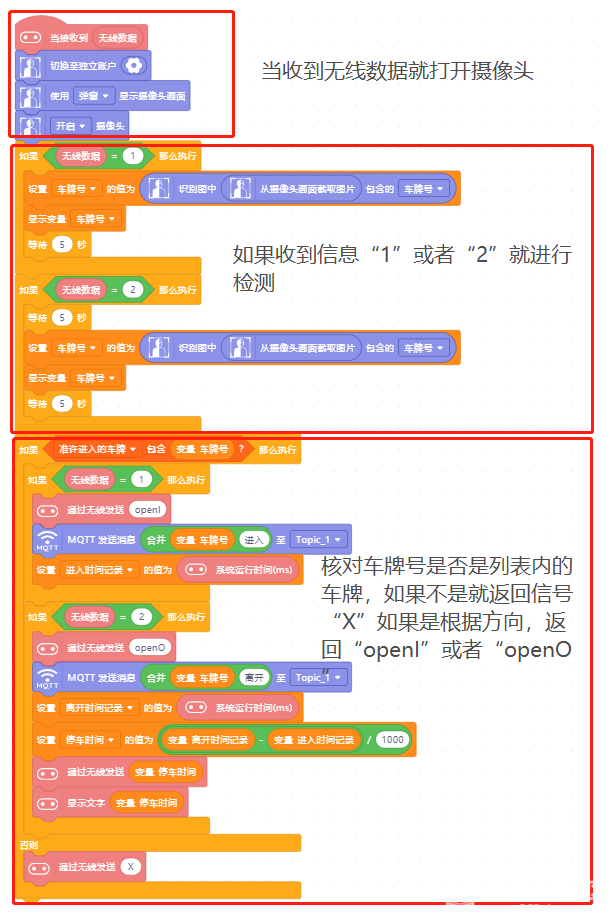 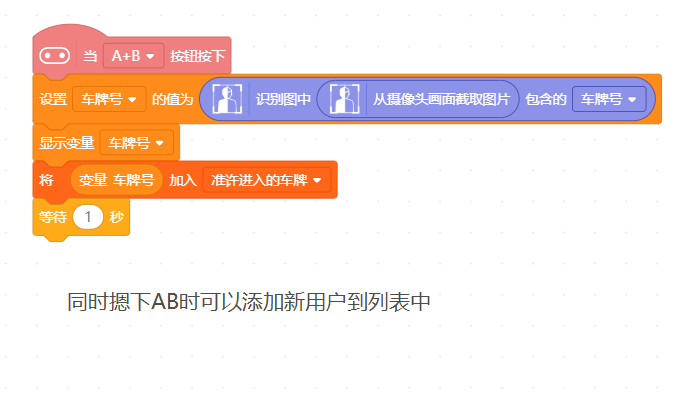 完成之后就可以直接测试运行了。到此就告一段落,玩起来吧~  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







