|
2962| 1
|
[用户分享] TinkerNode试用第二弹——成品1.0出炉 |
|
自从上一次的洗礼之后,我就知道我不该对它抱太大希望...... (是你技术太菜了好吗!  ) )所以,现在有请我们的受害者——闪亮登场!!! 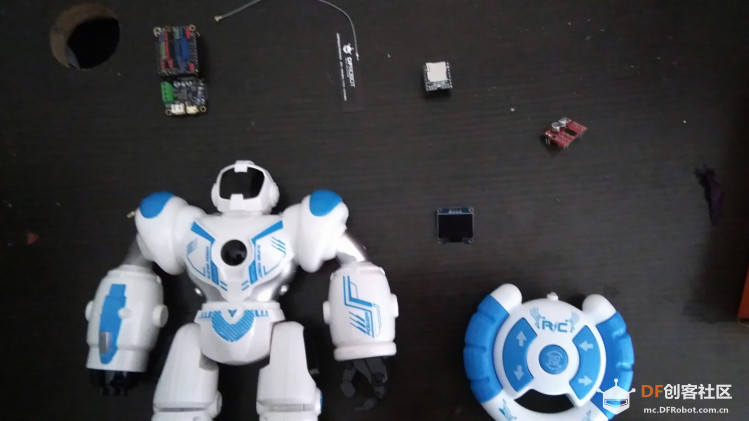 材料有: 玩具机器人一台 TinkerNode NB-IoT开发板+拓展版 9g舵机两个 L9110S电机驱动板一个 LED灯两个 电池一块 飞线若干 手机一部 ————————————————————我是分割线————————————————————  首先把机器人拆开,把控制板咔嚓掉 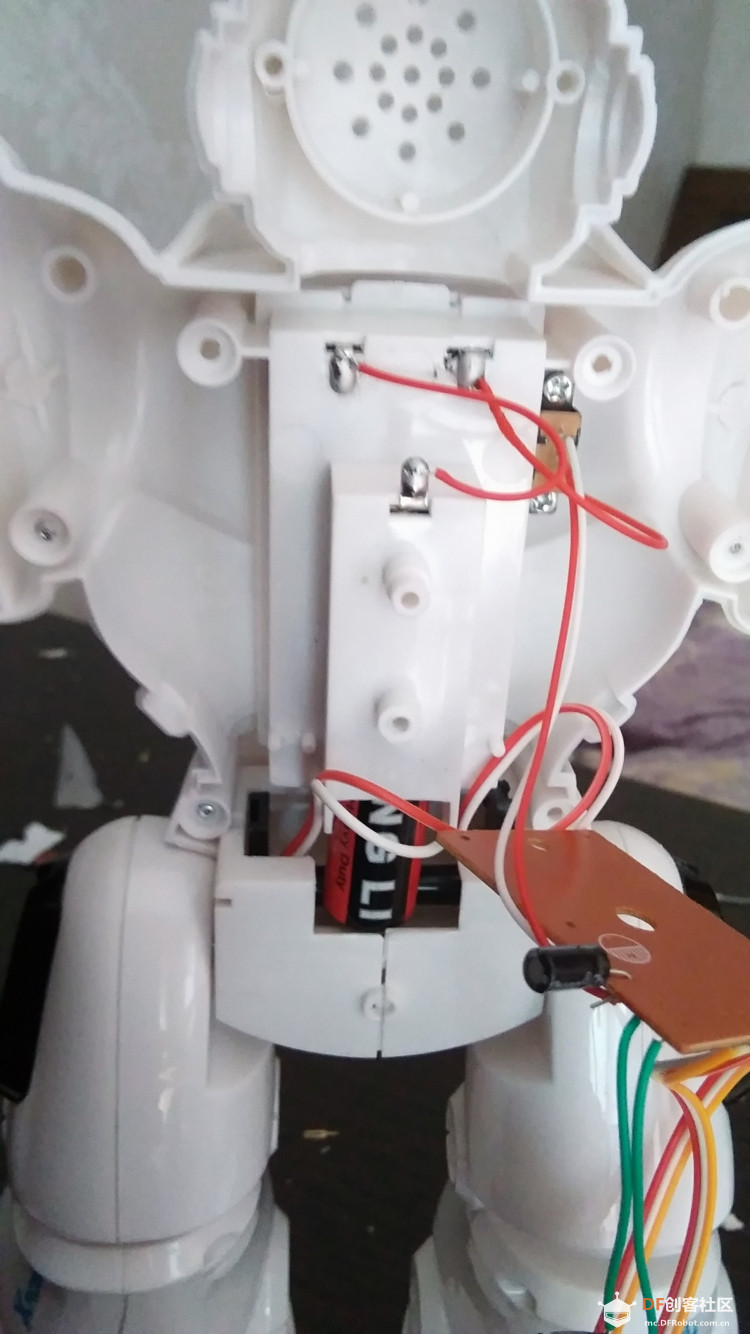 然后把手臂一分两半,后面有用。  正面照来一张,是不是很简单粗暴 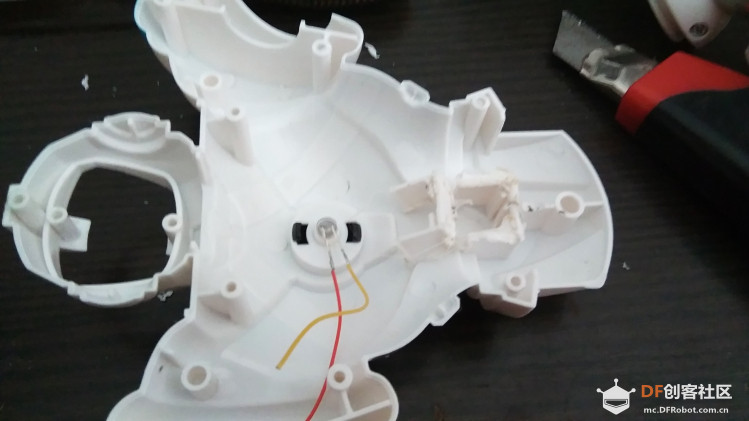 然后打个响指——pia一下就好了。 (其实是忘了拍照了) 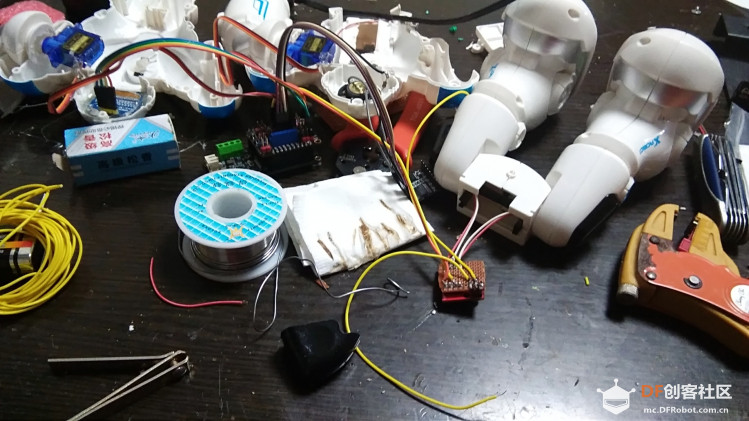 然后再打个响指——pia一下,就完成了! (其实还是忘了拍照了)  下面是吐槽时间。 1、我弄来的这个机器人,手是不会动的,需要我自己安舵机。而我的办法也很粗暴—— 用电烙铁融化关节,烫出舵盘的槽,把舵盘嵌进去然后再用热熔胶封住。 (大家切勿模仿!气体有毒!) 感觉我又少活了几年...... 2、我发现,只用两个IO口根本驱动不了两个电机...... 所以还得添一块Arduino来控制电机。 3、我发现之前的那块OLED根本用不了,所以我还是得焊两个LED面板来装在机器人脸部位置。还多用了两个IO...... 程序时间。 这次我使用了Blynk作为机器人的控制平台。 我预先制作了后期内容。 我添加了RGB灯颜色控制(一个列表)、RGB灯亮度(一个横向滑杆)控制、两个电机(按钮),一个LCD屏幕 后期使用过后发现WIFI实在是太卡了,要差不多等1-2秒才能读到一次信息。 所以我改成了BLE连接控制。 另外,我网购了74HC595 IO拓展芯片,正在路上,准备把电机驱动板搞起来 程序(暂未完工) [mw_shl_code=c,false]#include <BlynkSimpleEsp32_BLE.h> #include <BLEDevice.h> #include <BLEServer.h> #include <Servo.h> #define BLYNK_PRINT Serial #define BLYNK_USE_DIRECT_CONNECT Servo left; Servo right; char auth[] = "你的AuthToken"; BLYNK_WRITE(V0) { left.write(param.asInt()); } BLYNK_WRITE(V1) { right.write(param.asInt()); } void setup() { left.attach(D0); right.attach(D1); Serial.begin(9600); Serial.println("Waiting for connections..."); pinMode(LED_BUILTIN, OUTPUT); Blynk.setDeviceName("Blynk"); Blynk.begin(auth); } // the loop function runs over and over again forever void loop() { Blynk.run(); }[/mw_shl_code] 后面会有第三期,我会加更多的东西,把其他东西都做起来 就这样 告辞  |
 萌萌哒新人
萌萌哒新人
 ARD DAY
ARD DAY



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







