|
9251| 1
|
[知识点] 机器人大赛传感器系统及其选型(旋转编码器专篇) |

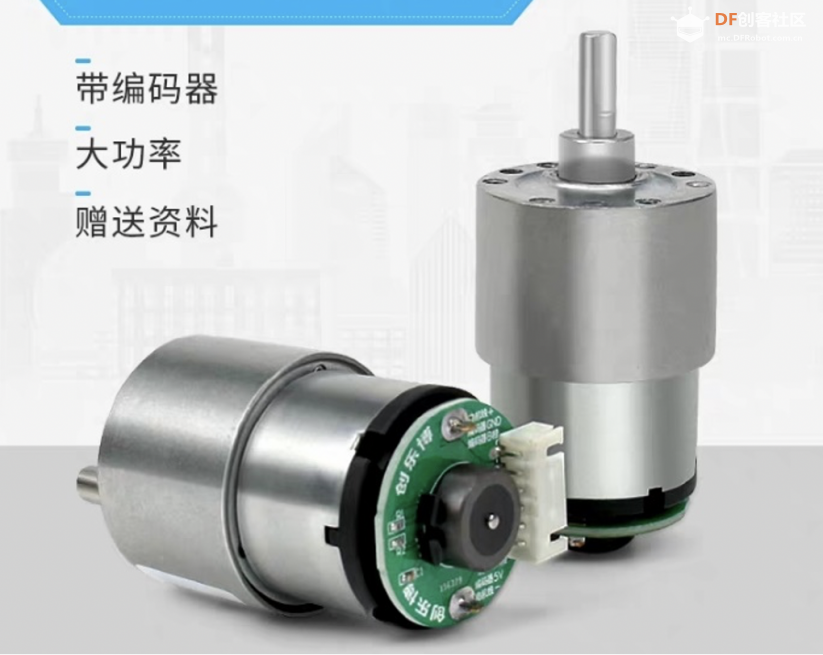
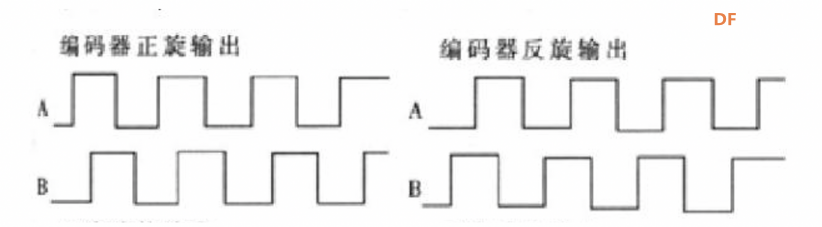
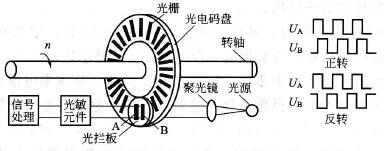
大赛传感器系统及其选型(旋转编码器专篇)旋转编码器基本原理旋转编码器是很多需要精确控制的场合的必须,一般配合电机使用。具体如图,电机尾端的电路板和黑色圆环就是霍尔式旋转编码器。 要记住,旋转编码器的电位是随着电机的位置(角度)变化的,而非速度、加速度或其他;旋转编码器的信号跳变一次,对应电机旋转了一固定角度。 旋转编码器的应用及PID实际应用中,一般将脉冲间隔记录下来,或者记录固定时间内的脉冲数,从而计算电机的速度、位置等信息,进而对其进行控制。不同的单片机有不同的方式来接受编码器传来的信息,需要注意,不同的记录方法往往有天壤之别。 接受、得到了需要的信息,我们需要对其(一般是电机)进行一定的控制。经典的控制算法为PID算法,即比例、积分、微分算法,在此我会作简单介绍。其中,P是核心算法,I或D通常必须配合P而存在 我们用旋转编码器接收信号、单片机输出PWM波来控制电机。我们可以简单地把PWM的占空比认为是油门,把旋转编码器经过处理后得到的速度值认为是汽车表盘速度。 P控制P控制,即比例控制。可以这么理解:当汽车速度低于我们的期望值时,就踩油门,差距越大就越用力,当这个差距缩小时就把油门放小。如果这个差距为零,油门就松开——当然,大家清楚,这样是不可能达到我们的期望值的,因为汽车的速度本身就需要油门来维持,随着油门渐渐放小,汽车的加速也会放缓,最终稳定在一个和目标速度有一定差距的固定值上。在控制学上,这个差距称为“稳态误差”,基本上任何纯比例控制都无法避免稳态误差的存在。 具体算法上:
式中kp为比例调节量的比例系数,也就是所谓“调PID”时需要调试的内容之一。
PI控制I控制,即微分控制,是为了消除比例控制下的稳态误差而存在。 还是以汽车为原型。之前我们用P来踩油门,存在稳态误差。见半天达不到目标速度,发了火,用力一脚油门,速度就上去了,也就没了稳态误差。 当然,电子线路可不会发火。它是把当前和之前几次的误差量加起来(积分),乘以比例系数,作为控制信号输出。算法累积之前误差量的数量,就叫作积分时间。
对电机角度的PI控制同上,不再重复。在调试I的时候,不光要调试ki,还要调试积分时间。I项的正负与P项保持一致。 PD控制D控制是为了抑制系统的超调趋势的——超调,其实就是俗称的“过了头”。 汽车上,就是一大脚油门,速度过了头,或者错过了路口;电机上,就是PWM值过高,速度或角度超过了期望值。当然,司机开车过头就过头了,但电机在超调以后会立即进入另一个反向的控制过程中,然后继续超调,继续反向控制,在若干次超调振动的过程中,振幅逐渐减小,最后稳定下来。如果没有D来抑制系统超调趋势,这样的振动会存在较长的一段时间,影响控制的效果;在某些系统中,这样的振动还会一直存在下去。超调的幅度和超调振动存在的时间受P和I的影响,kp和ki越大,超调越严重。 为了抑制超调,以使用更大的kp和ki达到更快的控制速度,便引入了微分控制,即D控制。 同样以汽车为例,D控制就是人感觉加速的“推背感”太强了,仪表盘飞快地上升,害怕了,就收了一脚油门。
式中,D项和P项的正负保持相反。 PID控制而PID控制,就是把P、I、D这三者均引入。
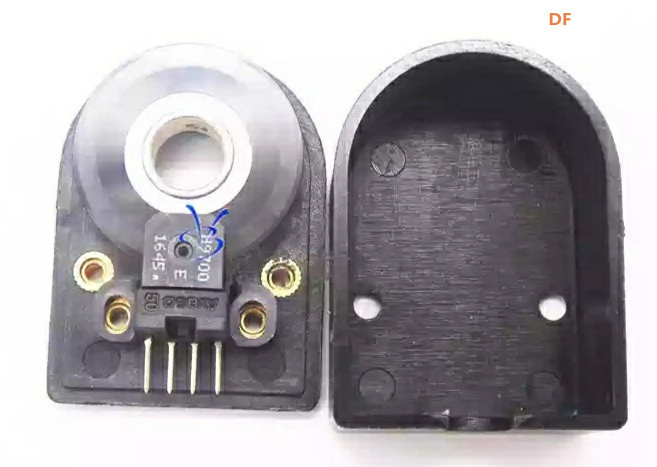
所谓的“调PID”,就是调试该式中的kp、ki、kd以及积分时间,以达到更快的响应速度和更小的超调。 我并没有太多调PID的经验,所以不好给出详细的PID调试说明,见谅。百度可以搜到不少PID调试教程,大家可以参考。 事实上,我们往往用不到完整的PID。一般在保证电机一致性较好、工况较稳定的情况下,PD足以达到较好的控制效果。调试PD参数时,可以采取P多(超调过大)加D,D多(速度被抑制较严重)加P的方式,调废了就降下来……才疏学浅,不再献丑…… 编码器的种类和选型之前介绍了霍尔编码器,这是比赛中最常见的旋转编码器。另外一种是光电编码器,在性能上要超过霍尔编码器,但较容易损坏,价格也更高。 以下是两种常见的光电编码器: 光电编码器相比霍尔编码器有着压倒性的优势——光电编码器的线数很容易就可以做到500、1000甚至2000,市面上有成熟的产品,而霍尔编码器的霍尔极对数一般也就十几对,精度完全是两个概念。线数的压倒性优势使得光电编码器有着更高的控制响应和精度,更加适应低速场合。当然,光电编码器对单片机和程序的要求也更高一些,因为有更多的数据需要处理。 一般而言,磁环编码器绰绰有余,只有少部分电机直驱或者追求高精度、快速响应控制的时候才需要光电编码器。 另外,编码器中还有更高精度(线数达到2^16)、性能更全面的绝对值磁环编码器,一般集成在云台里面,我们基本用不到,不再赘述。 购买与选型首先讲霍尔编码器。霍尔编码器一般不单卖,而是直接安装在电机上,作为编码电机出售。没有太多要挑选的,把电机选好即可,霍尔编码器基本不会出什么问题,出了问题也只能换电机。 光电编码器可以自己搜索,但是产品的种类大多不齐全,特别是光栅的安装孔经常不和电机轴配套。这里我推荐博丰盛的光电编码器,主要是其提供从1mm直10mm甚至更大的安装孔。当然,价格也更贵一些,大约50RMB左右,还算可以接受。要注意的是,光电旋转编码器的尺寸一般都较大,如果要安装在电机尾端,那么就需要555甚至更大直径的电机才合适,因为光电编码器的尺寸是稍大于霍尔编码器的。 购买光电编码器时一定要特别注意安装问题,包括光栅直径、光栅安装孔直径等等。 大多数情况,建议大家直接购买霍尔编码电机。 作者:南京航空航天大学,周子阳 相关文章跳转: 机器人大赛动力系统及其选型(电源篇) 机器人大赛传感器系统及其选型(旋转编码器专篇) 机器人大赛传感器系统及其选型(循迹、颜色、测距) 机器人大赛动力系统及其选型(执行机构篇)(上) 机器人大赛动力系统及其选型(执行机构篇)(中) 机器人大赛动力系统及其选型(执行机构篇)(下) |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed



 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶

 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员






