|
7700| 0
|
[知识点] 机器人大赛动力系统及其选型(执行机构篇)(下) |
机器 人大赛动力系统及其选型(执行机构篇)(下)本期内容,主要介绍在自动控制中占有重要地位的一种电机:步进电机。
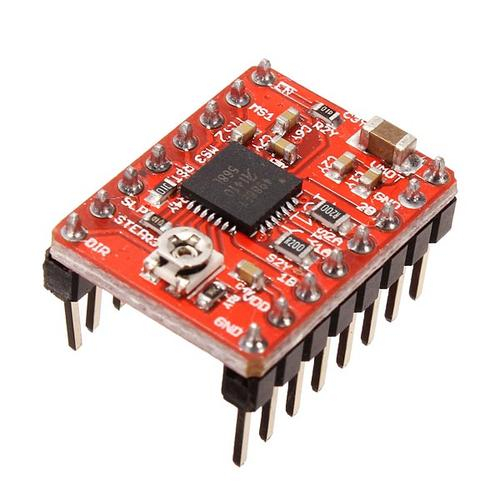
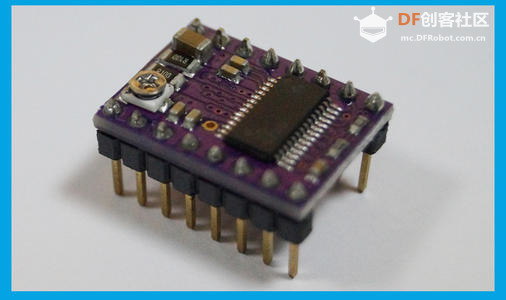
如果说之前介绍的电机的运行过程像是电梯,连续地发力,利用旋转编码器之类进行闭环控制,那么步进电机就是一级一级的楼梯,虽然不连续,但优点在于实现了开环控制,不需要额外的传感器,简化系统结构,只要记录我们控制它走了多少步即可。实际产品中,步进电机一般以1.8°为一步。 步进电机的原理,我将通过一个视频链接帮助大家了解: https://www.iqiyi.com/w_19s0mzcenl.html 步进电机一般采用二相四线制,即二相线圈,每相均单独引出两个引脚,一共四根线。步进电机必须要用专用的驱动板进行控制,典型的如A4988、DVR8825和TB6600。(图片比例是不一样的,实际上4988和8825体积都非常小,tb6600比他们大很多很多)
从左到右分别为a4988、dvr8825和tb6600. 步进电机的尺寸,及其对性能的影响步进电机的尺寸主要包括边长和长度,一般可以以边长简称,如42步进、57步进,因为步进电机的边长已经成为了一个标准系列,从28、35、42、57乃至更高都有同样的轴径和安装孔标准。而电机的长度则多种多样,不作介绍。 步进电机的性能主要包括扭矩和转速。由于步进电机生产制造的标准化,其性能主要受其尺寸影响。 扭矩是其最重要的性能参数,直接决定其带负载时的稳定性。扭矩大约与电机边长的二次方*电机高度成正比,意味着电机扭矩受边长影响超过影响的程度。 转速性能主要是指步进电机可以可靠工作的转速上限。由于步进电机结构限制,其扭矩会随着转速的提高而降低;当转速提高到某一临界值时,扭矩会发生断崖式的下降,完全无法工作。其主要受电机边长影响。最常用的42步进电机轻载允许转速一般为300RPM。此处的“轻载”是指中等偏大长度的两台电机驱动直径70mm的车轮以差速方式驱动一台全重2-3kg的小车。 步进电机的驱动上面说了,步进电机必须用专用驱动板驱动,如4988、8825和6600。 这三款驱动板中,A4988和DVR8825面向边长(因为步进电机截面近似正方形)28mm、35mm和42mm的步进电机,TB6600主要面向42和57步进电机。4988和8825相比,8825的驱动能力更强些,建议在长度40mm及以上的42步进中舍弃A4988。 具体是这样使用的:步进电机驱动板上有两个控制引脚,分别为direction引脚(方向引脚)和step引脚(暂且称为步进引脚)。Step引脚每一次高低电平跳变,电机就走一步,而direction引脚的电平高低决定了这一步走的方向。 步进电机的细分机械上,步进电机的步距角是1.8°,但往往会需要更小的步距角来实现更精确、更平顺的控制,故而引入了细分的技术。 细分技术的本质,是通过PWM技术在电机引脚上模拟出正弦电压来替代原有单纯的高低电压,从而在步距角间获得过渡,获得更精确、平顺的控制效果。一般可选2细分、4细分、8细分、16细分等。这一技术在3D打印机上有广泛的应用。 使用经验我曾经设计制造过一台以步进电机为主要驱动力的机器,还算有一定经验,在此分享给大家。 步进电机本质上是一种无刷内转子电机,特点是给多少脉冲走多少步,完全开环控制。相比其他无刷电机,步进电机在同功率下拥有更高的扭矩和定位能力,所以可以实现纯开环。但这种高扭矩、强定位也是有限度的,负载过大、转速过高时这种定位能力就会减弱甚至消失,造成“丢步”,也就是转子跟不上换向速度的情况;如何使用步进电机,其实就是如何避免丢步。 步进电机使用最广泛、最便宜的就是42步进,比赛选手们大多也选用这个尺寸的步进电机。注意不要让其工作在300rpm以上的转速,即使是极轻载也要保证在450rpm以下。至于550rpm以上的转速,空载都上不去的…… 选用较长的电机可以部分弥补转速提高导致的丢步,适当增加电压也可以,但只能作为转速低于450rpm时的辅助手段。 轻载时,步进电机可以直接输入目标频率的脉冲(当然不能太高),其完全可以在带着载荷的情况下完成“一步加速”——这也是大多数机器人比赛中应用步进电机的场合。当载荷较大时需要慢慢加速,一般在几个步距角内完成加速,但这种情况很少见。像3D打印机上也基本没有肉眼可见的加速曲线。 最后,我要提醒大家,步进电机不是合适的功率型执行机构。步进电机的优点在于其方便且精确的控制,低廉的经济和设计成本(因为较高的扭矩可以实现电机直驱),但其功率密度很低很低,高速性能也非常差——这是其实现方便有效的开环控制的代价。同样重量的步进电机和直流电机,步进的功率甚至不到直流电机的1/3。如果使用步进电机,那就意味着功率-,重量+,但设计成本和经济成本会好非常多,比较建议新手在需要精确控制的场合使用。
相关文章跳转: 机器人大赛动力系统及其选型(电源篇) 机器人大赛传感器系统及其选型(旋转编码器专篇) 机器人大赛传感器系统及其选型(循迹、颜色、测距) 机器人大赛动力系统及其选型(执行机构篇)(上) 机器人大赛动力系统及其选型(执行机构篇)(中) 机器人大赛动力系统及其选型(执行机构篇)(下) |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed




 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员






