|
7176| 0
|
[知识点] 机器人大赛动力系统及其选型(执行机构篇)(中) |

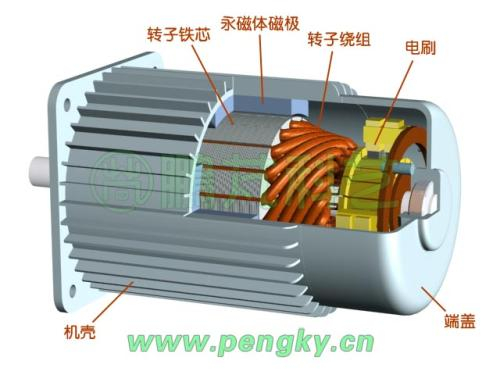
机器 人大赛动力系统及其选型(执行机构篇)(中)无刷电机无刷电机的结构有多种,有各种不同的分类方法。在此先介绍市面上常见的无刷电机的共同点。 无刷电机,顾名思义,是没有电刷的电机。传统的直流电机采用旋转电枢、固定永磁体的结构,用电刷来完成换向。
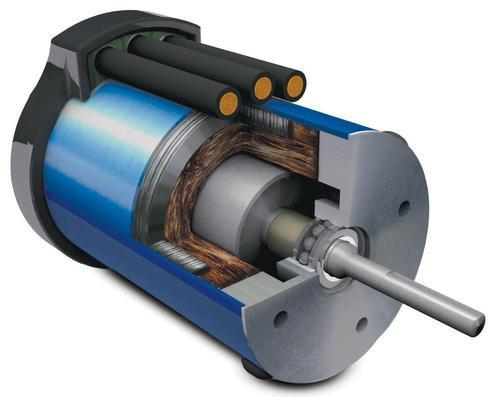
虽然电刷有着工作可靠、成本低的优点,但也限制了电机的性能:电刷处存在不小的接触电阻,高速运行时摩擦生热,是电机的一大热源,高速大电流时甚至会产生“环火”,电机的性能难以继续提高,产生的电火花还有电磁干扰的问题。但是,这些问题在无刷电机上统统不存在,因为……因为它没有电刷,电枢为定子、永磁体为转子,用“电子换向器”完成换向,即无刷电机驱动板/无刷电机电子调速器(电调)。
可以看到,无刷电机有三根线——这是为什么呢?在此我全文抄袭知乎用户“默戈”的回答: 好吧其实默戈就是我)
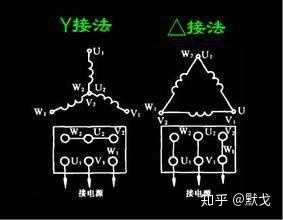
其实,三相是一个最简化的选择。 首先要知道“星型接法”和“三角接法”。这是对电机各线圈之间电路关系很形象的描述。
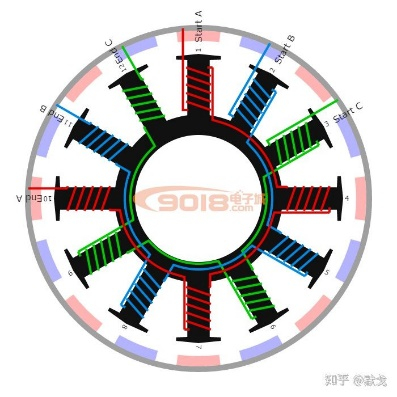
不论是三相线圈,或者更多相的线圈,都可以采用这两种接法。使用时给各个引脚按一定次序通电,就可以实现电机连续转动。 为什么说三相是最小的呢?因为二相是无法进行这两种接法的……如果使用二相,那么两组线圈的引脚必须分别引出,于是,你得到了一个二相四线的电机(步进电机大多采用这种接法,因为步进电机有“细分”的需求)。你会发现,三相也不过引出三个引脚,做一个三相H桥、六个Mos管即可驱动,但二相四线制需要两个H桥、八个MOS才能驱动。 而更多相,相比三相,也不过是转矩波动更小了而已。况且,转矩波动是可以通过程序的编写来极大地减轻的(参照云台无刷电机)。而这更多的相数会导致更高的成本,在设计上的限制也更严格。 比如,三相无刷电机,只要极对数是三的倍数即可,三对、六对乃至48对。
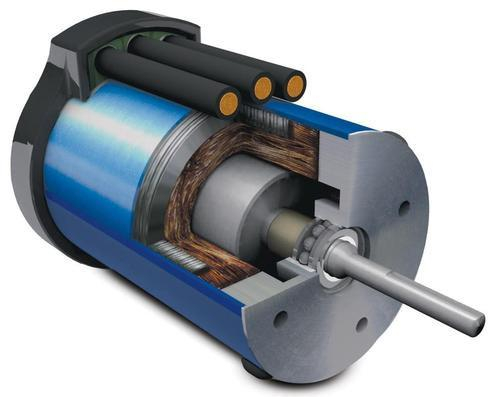
但如果是更多相,比如七相,极对数起步就是7对,然后14、21……设计上的自由程度就下降许多了。 当然极对数多也有好处,就是其转矩波动更小。对于正弦的单相波形,三相的波动大约15%,5相5%,7相2.5%,另外在控制上也比较容易做得更好些,可以更加灵活地分配电流,达到更高的效率。但这个效率优势并不是特别巨大,而且需要更复杂的控制系统。 虽然无刷电机理论上性能绝对超过有刷电机,但由于其特殊性质,很多时候是无法使用的,选型时不应无脑选择无刷电机,即使不差钱。主要原因参考“有感与无感”部分。 内转子与外转子从机械结构上看,无刷电机可以分为内转子与外转子电机。无刷内转子的外观比较像有刷电机,全封闭或者带散热孔;而无刷外转子的转外露。
左边是车模用无刷内转子,右边是航模用无刷外转子。 二者对比,由于可以将内部较好地封闭起来,无刷内转子的防水防尘性能更好,更适合车用、船用;而无刷外转子的扭矩更大,适合直驱,故而更多用来直接驱动航模的螺旋桨。动力特性上,功率密度差异不是很大,内转子更偏向高速小扭矩,外转子偏向低速大扭矩。由于大多数时候,电机的转速的足够甚至过大的,所以扭矩更大的无刷外转子更多地用于直接驱动工作部件的场合,比如直接驱动螺旋桨、轮毂电机等等;而内转子电机扭矩小,需要减速,一般会配上减速器车用。 有感与无感利用三相H桥换向的无刷电机电子调速器虽然在性能上超过电刷,但有一个很要命的问题:三相H桥并不知道该什么时候换向。 很多电调采用反电动势法(不作详细介绍,大家可以百度来看)来抓住换向时机,不需要额外的传感器,也就是“无感”。虽然这种方法可以节约成本,不需要在电机的设计上做安排,但反电动势法要想可靠工作,必须满足两个要求:
这样的无感电机/电调大多是应用在航模和船模上的,而航模和船模的电机基本都用于驱动螺旋桨和水泵,完全满足以上两个条件。以下是常见的航模用无刷电机和电调。
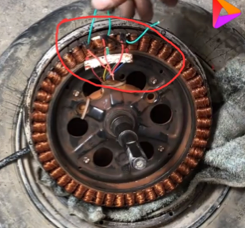
要解决低速和启动的问题,就要有感无刷电机登场了。有感无刷电机大多使用霍尔传感器检测转子位置,所以不存在无感电机的各种限制。其实生活中有感无刷电机的应用也极其广泛,只是做成了封闭的总成我们看不到而已:
没错,我没放错图,就是这个。电动车后轮拆开以后是这样的,红圈里面是用来检测转子位置的霍尔传感器(图片来自网络修车视频):
转子是这样的,可以看到一片片的永磁体(图片来源见水印):
当然,电动车用的无刷电机我们是用不着的。实际比赛中,我们可能会用到两种有感无刷电机。一种是电动滑板车用的有感无刷电机,但是由于应用于电动滑板车,块头较大,不合适,配套总成的价格也比较高,少有应用。更多的是一些自带驱动(电调)的有感无刷电机,比如驰海的一系列无刷内转子电机:
这些电机并非采用了钕铁硼永磁体的型号,标定也稍保守,功率密度只是稍高于普通的有刷电机。我推荐这些价格明显高于有刷电机的产品的理由如下:
这类电机,就是之前我在有刷电机篇提到,选型标准和有刷电机差不多的,通过查看扭矩和转速进行选型。详细内容参见有刷电机篇。
相关文章跳转: 机器人大赛动力系统及其选型(电源篇) 机器人大赛传感器系统及其选型(旋转编码器专篇) 机器人大赛传感器系统及其选型(循迹、颜色、测距) 机器人大赛动力系统及其选型(执行机构篇)(上) 机器人大赛动力系统及其选型(执行机构篇)(中) 机器人大赛动力系统及其选型(执行机构篇)(下) |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed








 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员






