学习内容
介绍模拟角度传感器Rotation Sensor V2
普通的电位器的旋转角度最多只有300度。所以把Arduino的5V供电分配到每1度后,精度是相当低的。
如果你想制作一个角度或者模拟量精确控制的项目,最好是选择这款精密角度传感器。
它是基于多圈精密电位器,可以旋转10圈左右,可将电压细分为1024份。可通过3P的连接线与传感器扩展板结合,可以精确地实现角度微小变化的互动效果。
该款商品已进行更新。V2版具体线序请参考页面下方产品资料库。V1版请根据模块上丝印标注“1、2、3顺序"接线。
在树莓派上使用模拟角度传感器
-
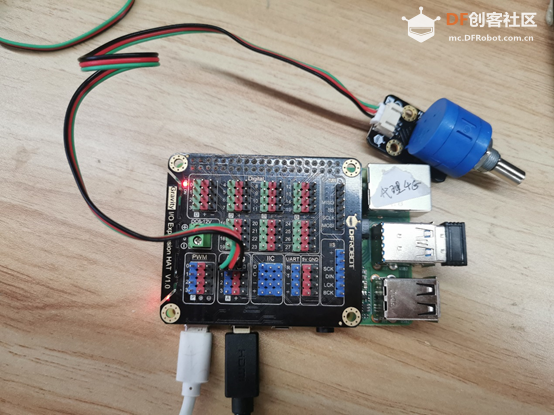
将树莓派开机并将正确安装树莓派扩展板
-
将模拟角度传感器接入扩展板的0号模拟口如图:
-
安装Python依赖库与git,树莓派需要联网。如已安装,可跳过该步骤。在终端中,依次键入如下指令,并回车:
sudo apt-get install build-essential python-dev python-smbus git
-
下载驱动库及程序。在终端中,依次键入如下指令,并回车:
cd \~
git clone https://github.com/DFRobotdl/37\_Pcs\_Sensor.git
-
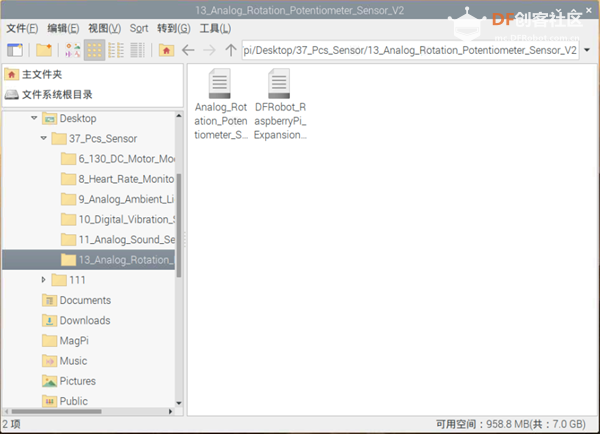
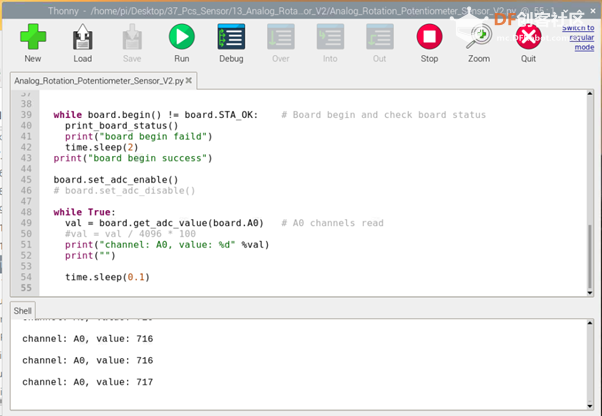
进入37_Pcs_Sensor\6_Analog_Rotation_Potentiometer_Sensor文件夹中找到Analog_Rotation_Potentiometer_Sensor_V2.py文件使用Thonny
Pyth
IDE打开并运行就可以看到打印的模拟数值了,转动模拟角度传感器数值会发生变化。
|
|
|
|
|
|
|
|
|
|




 沪公网安备31011502402448
沪公网安备31011502402448
 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






