|
8192| 8
|
用Arduino自制一个小型蜘蛛机器人 |

本帖最后由 RRoy 于 2021-9-30 11:08 编辑  这个小机器人作者还在改进当中,目前具有抛网、攀爬和摆动的能力。 主要器材
在用CAD设计了一个框架模型后,作者3D打印出了各部件,把所有的零件放在一起,做了组装。  蜘蛛机器人的主板是由一个Arduino Nano控制的(作者一直在使用UNO做原型,但Nano较小的外形尺寸对最终的建造来说要好得多),一个HM-10蓝牙模块,所以可以用手机控制机器人,以及一个pca9685伺服驱动器。 制作过程 首先作者要解决蜘蛛机器人“吐丝”的问题。这边作者很快想到了利用一个抓钩的想法。 然后是另一个问题: 1.“蜘蛛丝”应该用什么材料?(经过一些快速的测试,作者最终使用了凯芙拉线,简称“芳纶”) 2.抓钩要如何发射出去? 这边作者没有使用压缩空气,而是决定制作一个弹簧装置(实际上使用了一个圆珠笔的弹簧),因为抓钩和线很小很轻,用这个小弹簧可以更容易装在机器人里。  整个发射装置通过推入钩子和设置扳机来加载,然后通过电机推下扳机杆来触发。还有一个额外的电机来控制上下瞄准。 下一个挑战是绞盘和释放机制,用于拉紧钩子,爬上网,并在合适的时机在摆动释放。 这边作者尝试了很多次,第一次,整个机器人直接散架了……  调整参数,在第二次摆动的尝试中(这次更高更远),机器人的组件成功地保持在了一起,至少对于原型机来讲,算是成功了。  作者也说,这个会是在下一步设计中需要重点改进的地方。 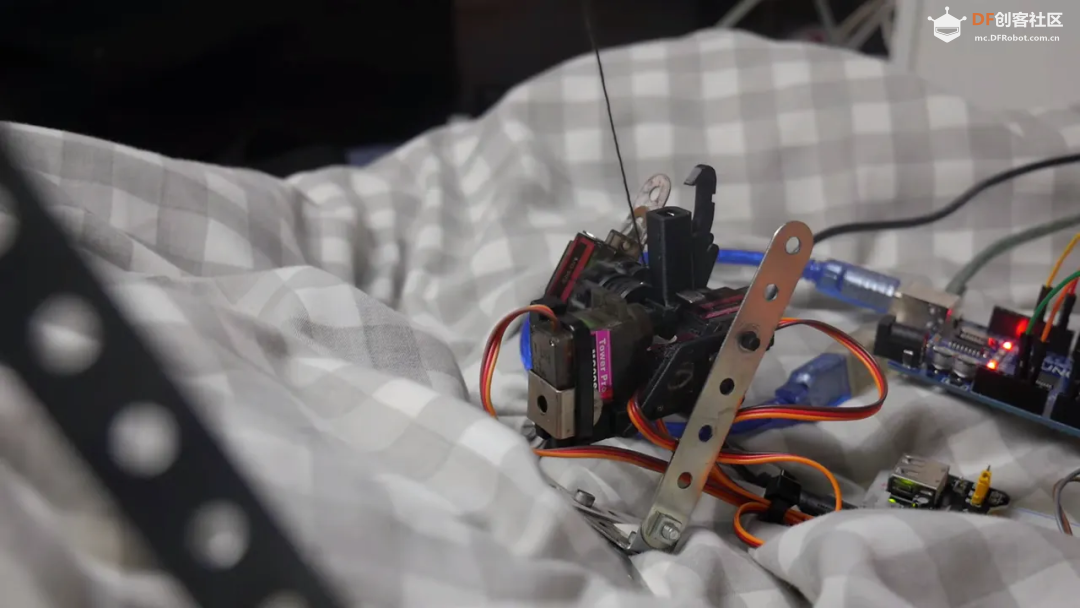 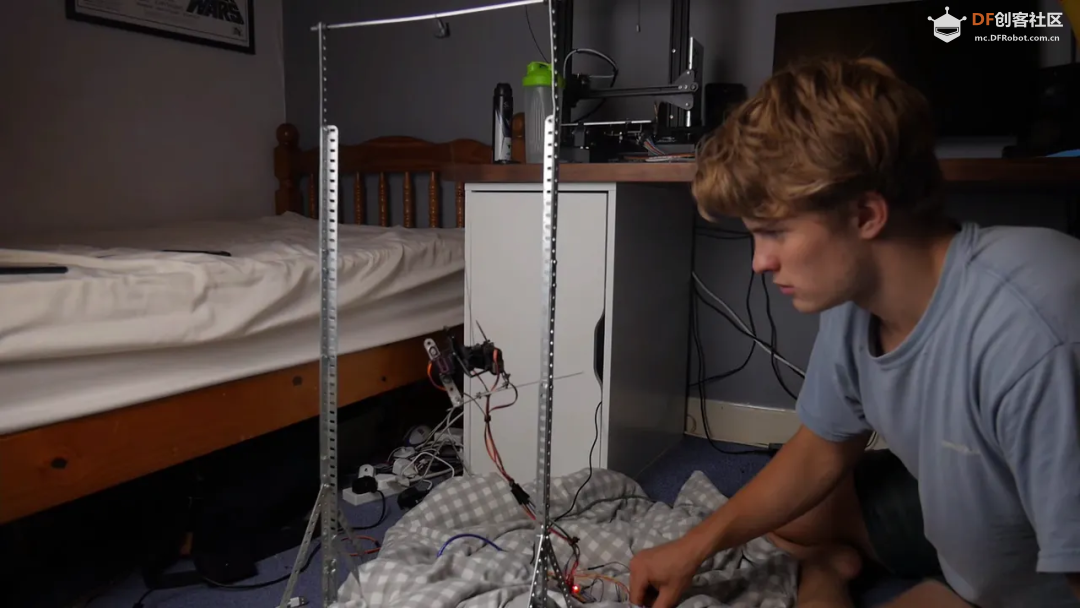 初步效果展示 目前,机器人已经可以成功完成爬墙!  甚至已经可以去偷薯片了!   原文链接:https://www.hackster.io/adambeed ... e-spider-man-32ed8c 项目作者: adambeedle 译文首发于DF创客社区 开源项目,转载请务必注明项目出处与原作者信息 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶



 萌萌哒新人
萌萌哒新人
 宣传大使
宣传大使
 小蘑菇
小蘑菇
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






