|
43109| 0
|
[教程] 飞控参数说明 |
本文将围绕以下典型参数表来解释各参数的意义和选配标准。
飞控尺寸不同大小的机架需要配合不同尺寸的飞控,主流的尺寸有三种: 常规尺寸:通常是五寸机的标配,也常见于各种三寸以上穿越机中。 Mini尺寸:常见于三寸以下的机架中,很多三寸或五寸的机架通常也会兼容mini尺寸的飞控 AIO尺寸:是All-in-one的缩写,意为飞控电调甚至遥控接收机多合一。常见于体积最小的室内穿越机中。 飞控的螺丝尺寸也有差异,以常见的M3为例,3的含义为螺丝直径为三毫米。飞控常见的安装孔尺寸如下:
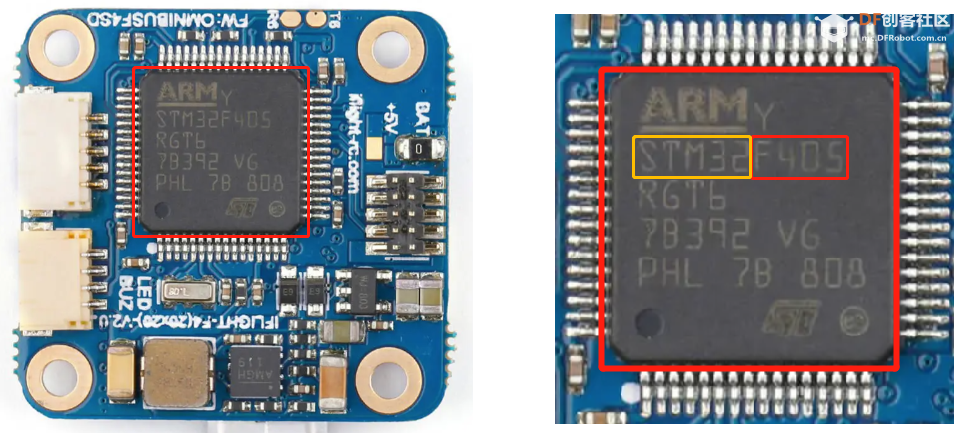
处理器(MCU)F4,F7的处理器分别是什么? 微处理器是决定飞控性能的关键,飞控的品名中一般都会直接标注F405,F722等微处理器的型号。处理器的型号可以直接在芯片表面上看到。
例如上图中的ARM STM32F405的含义分别是:
ARM架构的STM32系列芯片于2007年发展至今,技术已经非常成熟。而该系列的芯片也在逐年更新迭代,诞生了F1~F7系列。该系列被广泛用在穿越机中,具体参数如下:
以常见的F405为例,以上参数的含义如下:
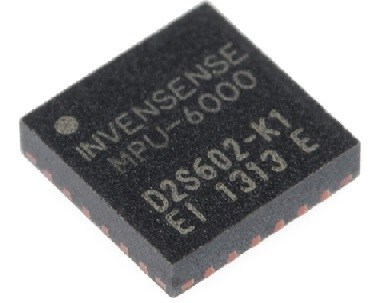
总的来说处理器发展到F4系列以后就已经不是限制穿越机性能的主要原因了。在购买时通常选择兼容性和性价比较高的处理器即可。比如F745虽然参数上优于F722,但是后者价格便宜,且完全能满足飞行的需要,所以目前F7系列的飞控绝大多是会选择F722。 串口数量处理器支持的串口数量不一定和实际能使用的串口数量一致。在一些小型飞控上也会因为尺寸原因仅从芯片中引出部分串口。另外,F7处理器串口具备信号反相器功能,而F4不具备。反相器功能如下: 串口信号反相器(UART Signal Inverter) 接收机常用的SBUS协议需要连接至带有信号反向器的UART串口才能正常工作。F4处理器内不包含信号反相器,SBUS必须要连接到带反相器的RX引脚,所以接收器必须按照产品附带的连线图进行连接。F7处理器中内置了信号反相器,不存在此问题。 姿态传感器(IMU Sensor)姿态传感器是基于微机电系统(MEMS)的微型传感芯片,常见的姿态传感器型号包括MPU6000,MPU6050等,通过SPI总线连接至处理器,用于检测穿越机的姿态。
另外也有MPU6050等传感器集成了电子罗盘,能用于感知地理方向,但是穿越机上电磁设备较多,电子罗盘一般需要校正才能使用。 MEMS类传感器需要较强的物理和电子抗噪能力,MPU6000两个抗噪指标都相对优秀,是目前最常用的型号。
另外,采样率也是传感器的另一个重要指标。理论上采样率越高越好,但是受到电路波动的干扰,过高的采样率往往发挥不出效果。MPU6000的8KHz是一个比较折中的选择。BF中的采样率就是这个含义【图】。 黑匣子闪存(Black Box Flash)处理器内的闪存空间有限,仅能用于储存固件和参数,所以飞控上一般会集成一个闪存芯片用于储存飞行数据。目前闪存大小一般在几兆(MB)到几十兆不等,一般能储存数十分钟的飞行数据。 输入电压(Input Voltage)输入电压指飞控电源的电压范围。飞控的供电分为电调供电和锂电池供电两种。典型参数表中的3~6S Lipo(12.6~25.2V)代表飞控既可以直插3~6S锂电池,也可以连接12.6~25.2V的电调供电。但是不排除部分飞控不能直接通过锂电池供电,如果电压过高可能会导致飞控烧毁。在选配时需要着重留意电压范围。 输出电压(BEC)飞控上板载的降压电路(Battery Eliminate Circuit)能把输入电压降为几档,为各种元件供电。最常规的输出电压分别有3.3V,5V,9V等,用途可分为型号电压和驱动电压。 信号电压:通常为3.3V和5V,用于为穿越机的遥控信号接收机等外设供电。这些元件大多用于收发信号,电流较小。 驱动电压:通常为5V和9V,用于驱动大电流设备,如FPV相机,图传,LED灯等。 在连接设备时需要注意输出电压是否在外接元件的额定范围内,并且外接设备的电流是否小于BEC的最大电流。 电调协议DShot(Digital Shot)是目前穿越机最主流的数字电调协议。相较于传统的模拟电调协议,DShot的抗干扰能力更强。DShot后面的数字代表数据传输的频率,如最常见的DShot600代表飞控与电调的通信速率为600,000字节/秒。由于DShot的频率远远超过了绝大多数飞的感知范围,购买留意飞控的协议是否与电调兼容即可。 OSDOSD芯片用于在摄像头捕捉到的图像信号上叠加更多信息。早期的飞控软硬件功能不完善,OSD模组需要额外购买,并且手动焊接到飞控上。目前OSD芯片基本已经是飞控的标配。 LED穿越机的飞控支持连接WS2812系列三元色(RGB)LED灯带。在Betaflight能够单独为灯带上的每个灯珠设置灯效。另外,我们也能为这些灯效能设置简单的触发条件,如增加油门显示绿色,电量过低显示红色等。 飞控上的LED信号口决定了能够独立控制灯带的数量。每条灯带上都能串联若干个灯珠。在选购飞控时需要留意BED的5V输出电流,单个灯珠需要保证有0.3A以上的电流驱动。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






