飞控是一块裸露的印刷电路板(PCB),表面焊有各种电子元件,这些元件通过顶层的金属布线连接至各个引脚(Pin)。引脚既可以用于供电,也可以用于读取信号,而飞控的接线过程就是将外接设备焊接到引脚所对应的焊盘(Soldering Mask)上。在阅读飞控的接线说明之前需先了解电路回路,串并联等基础电路知识。
连线图
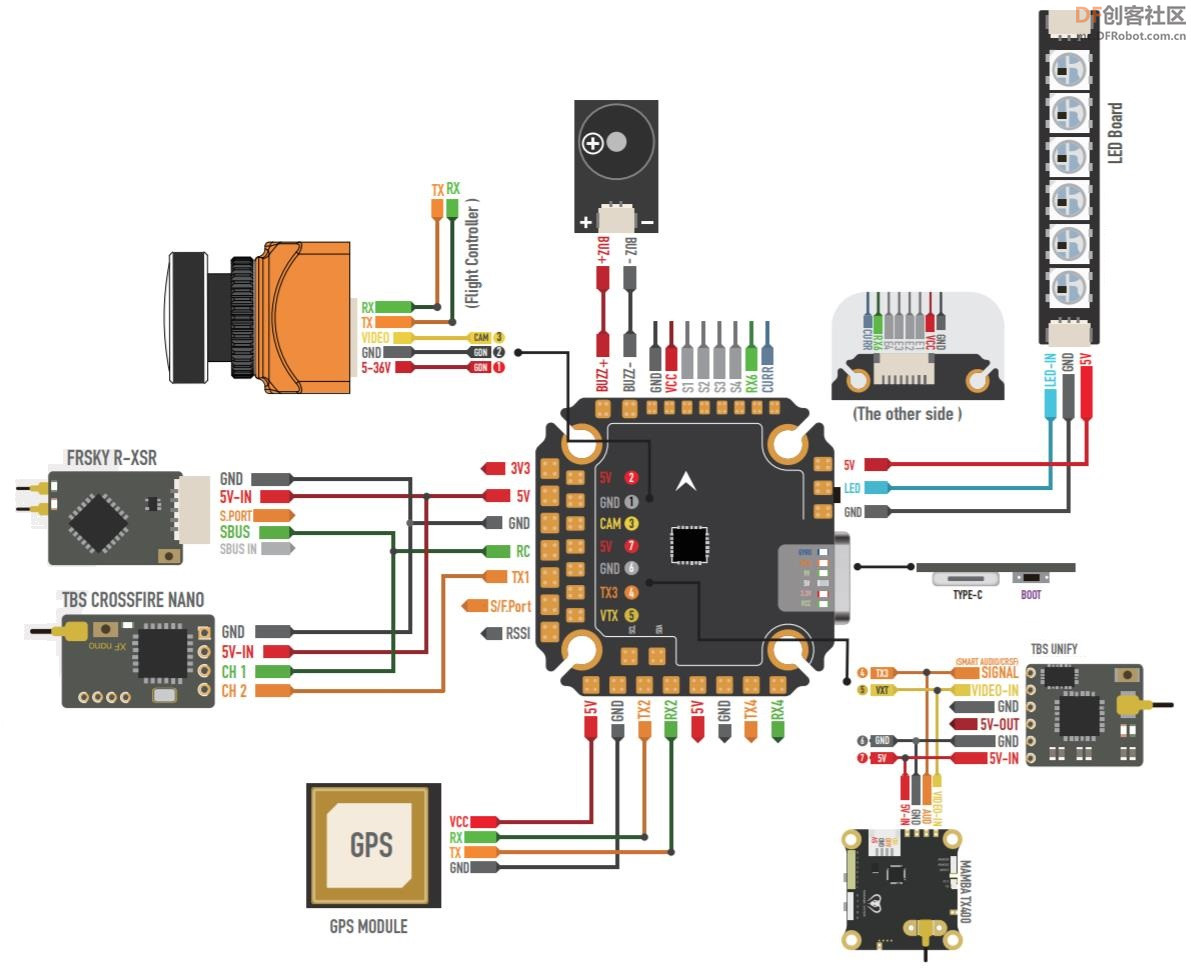
飞控接线图(典型)
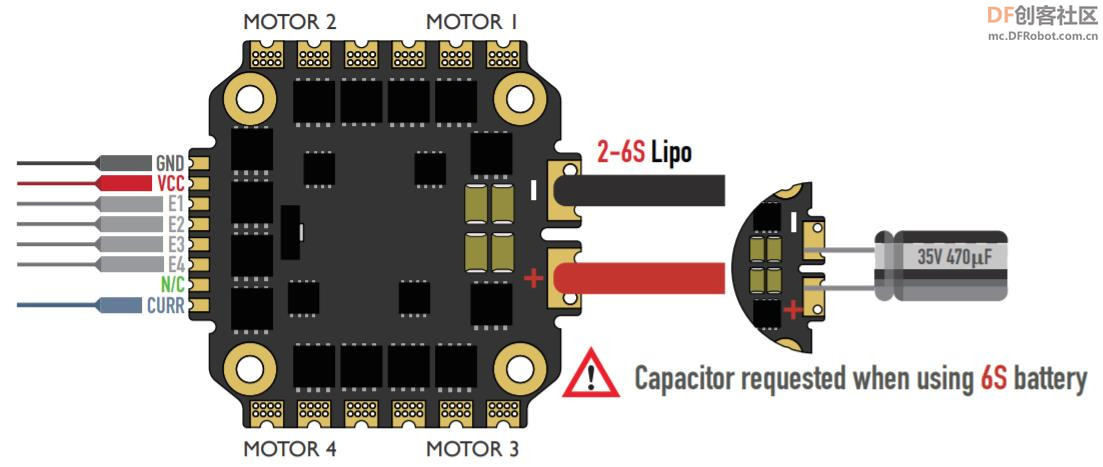
电调接线图(典型)
引脚说明
供电类引脚
穿越机有许多供电口,这些供电口的电压分为高低几档,部分用于外接连接电源,部分用于为各外接元件供电。在接线前需要确认供电口的电压否与元件额定电压匹配。超过额定电压会导致元件烧毁。
电源的正极引脚包括输入引脚(VIN / V-BAT)以及输出引脚(5V /VCC / 5V / +),用红色表示。
另外,电路需要负极供电口(GND或G)才能形成回路,用黑色表示。
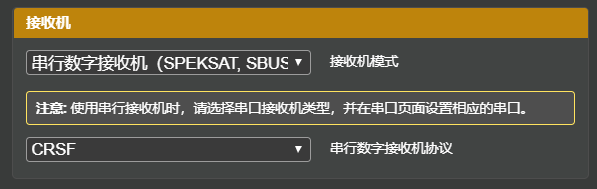
信号类引脚
电调,摄像头,图传,接收机,LED灯条,传感器等各种电子元件需要连接至飞控上的各路引脚。这些引脚分别支持不同的协议。常见的引脚有以下几种:

市面上常见的飞控一般会板载多个UART串口,不同的接口可以通过TX/RX后面的数字来区分,如UART1 包含TX1/RX1两个接口。

串口收发信号的速率可以通过波特率来设置,只有当收发端波特率一致时才能正常通信,大多数飞控默认的波特率设置为115200bps。
-
PWM / PPM模式:脉冲信号协议,在早期模型中很常见,一个引脚能只接收一个通道的信号。
-
模拟摄像头接口(CAM):
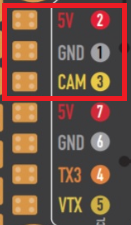
市面上常见的摄像头一般有五个引脚,视频信号和正负极引脚,以及一对调试引脚。
飞控上只需要连接视频信号和正负极三个引脚即可。
有些型号较旧的摄像头供电电压在10V~25V之间,需要连接至10V以上的电源口。
注意:摄像头不能直连电池,电机加减速造成的感应电压可能将其烧毁!
-
模拟图传接口(VTX) :
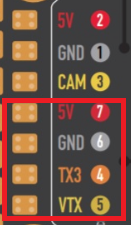
视频信号需要四个引脚,包括视频输出引脚(VTX),调参引脚(TX)以及一对正负极引脚。
视频输出引脚(VTX)连接至图传的视频输入引脚(VID / VIDEO IN)。
调参引脚允许遥控器远程调节图传功率等设置,是一个可选功能。调参引脚可以在地面站中设置为任意TX引脚,并连接至图传的调参(RX)引脚。
图传上通常还会有一对5V外接正负极引脚,不需要接线。
注意:有些型号的图传供电电压为12V,连接至5V输出引脚会导致模块烧毁!
-
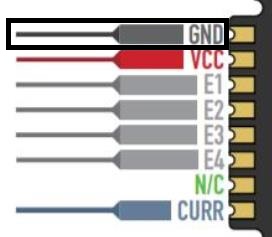
电调接口:
【图】
包括四个电机信号口,一对供电口,以及一个电流监测口(CURR)。目前主流的飞控一般通过排插连接连接电调。
-
灯带接口(LED):
【图】
LED灯带需要连接至LED信号口和正负极三个引脚。
-
蜂鸣器接口(BUZZ):
【图】
蜂鸣器连接至BUZZ+ 和BUZZ- 两个引脚,通过引脚间的电压震荡产生高频鸣响。
其他引脚
-
I2C总线(SDA / SCL)与SPI总线:
【图】
两种协议都可用于连接板载或外接传感器,如加速度计,角加速度计,气压计,GPS模块等。
I2C总线由四个引脚组成,支持集联多个外接设备。设备间并行通信,通过地址进行区分。
SPI总线是飞控上传输速率最快的接口,通常用于连接数据量较大的传感器。部分集成了板载遥控接收机的飞控也会通过SPI总线连接接收机。
两种协议在入门阶段不用深究。
| 



 沪公网安备31011502402448
沪公网安备31011502402448

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







