|
47978| 0
|
[教程] 穿越机 地面站调参详解 |

|
地面站调参是一个相对复杂的步骤,也是飞机起飞前的最后一步。调参能将穿越机的所有信号和协议打通,所以调参之前先要确保接线和焊接没有错误,且遥控器对频完毕。如果调参过程中出现异常,需要先拆机修复硬件问题。 调参完成后,可以通过简单的目视飞行来测试动力系统和遥控系统。穿越机暴走危险性极大,轻则击碎电脑屏幕,重则割破皮肤甚至毁容,在上电之前请明确以下事项:
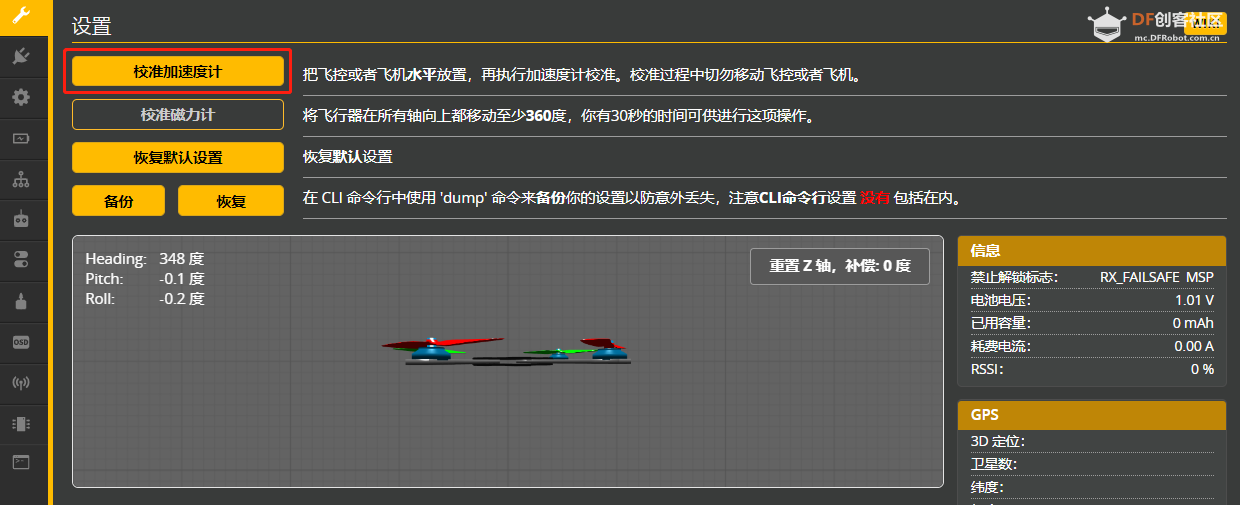
接下来我们将按照地面站左侧选项卡从上往下的顺序依次配置: 机身调平调平的步骤能让飞机在自稳模式下时刻保持水平的悬停姿态。飞机如果没有调平,在悬停时将发生持续的偏移。 调平过程很简单,将飞机在水平桌面上平稳放置后,单击校准加速度计即可重置水平位置。校准会持续一秒,期间不要移动飞机。
端口设置
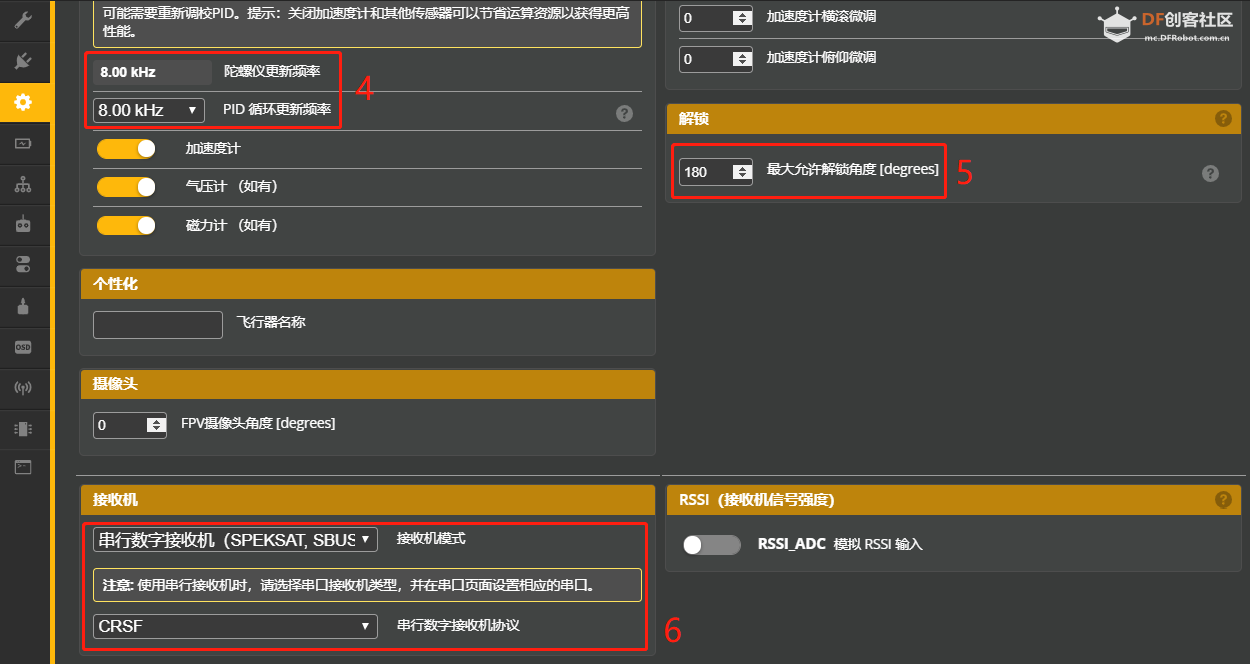
基础功能设置基础功能设置页面能够选择机型,电调协议,遥控器协议等。入门阶段需要了解以下功能。
向下滚屏:
向下滚屏:
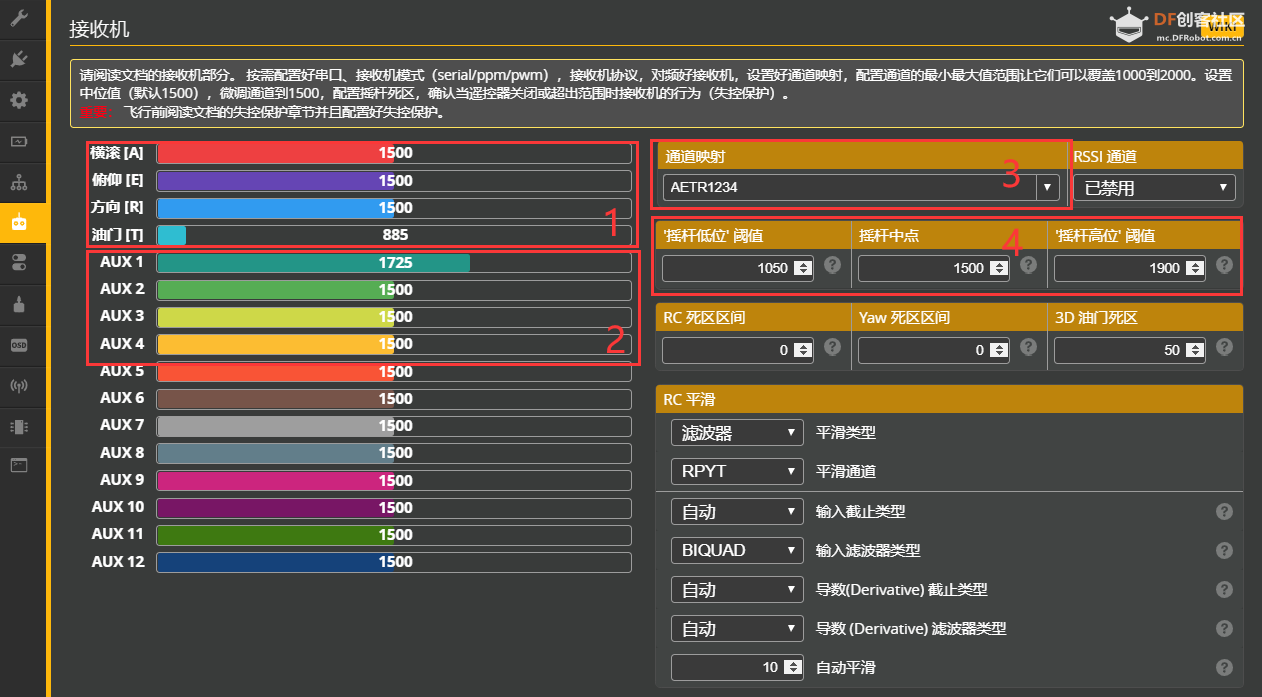
遥控通道映射设此步骤只有在遥控器完成对频后才能设置。部分飞控需要连接锂电池才能给接收机供电并对频。
解锁,自稳,反乌龟等设置页面中设置拨杆开关的各个功能,需要先在上一步中确认各拨杆开关的信号能被接收到。 黄色小点的位置会随着摇杆位置而移动,拖动黄条两端可以设置触发阈值。小点碰到黄色区域就能激活对应模式。
入门阶段需要配置以下模式:
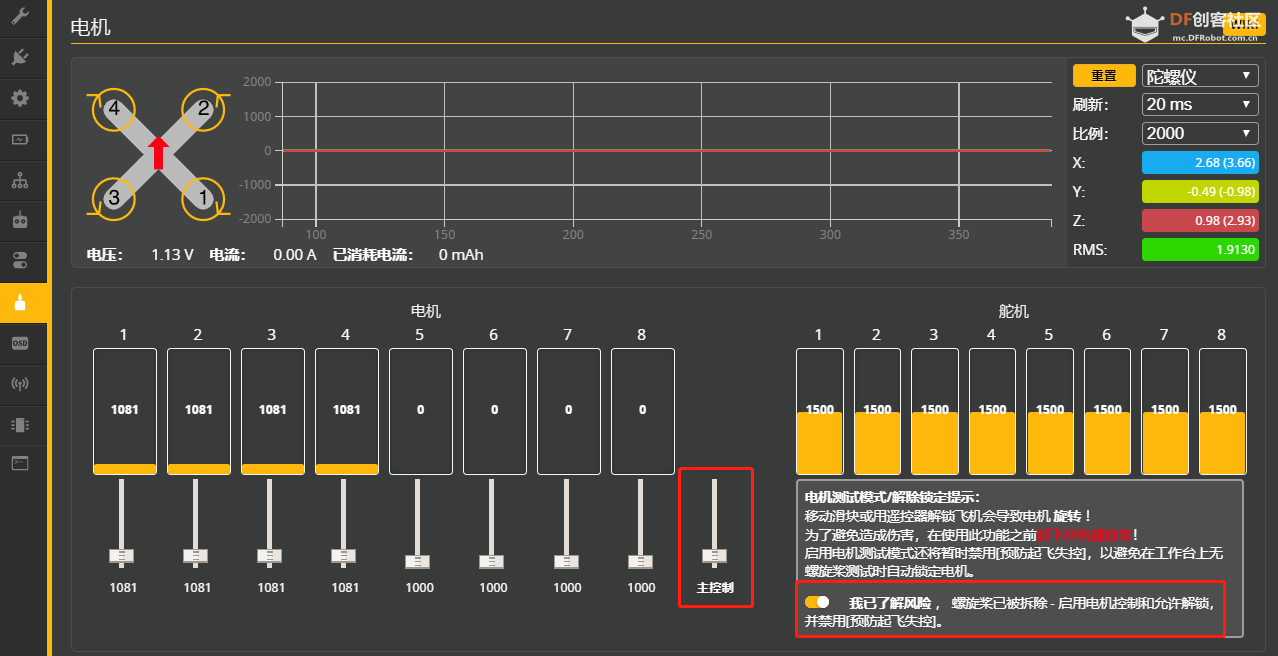
电机测试连接电池
插电时飞控将启动机身自检,发出蜂鸣器提示。如果没有提示音需要检查锂电池的电量或接线。 电机低速转动测试打开右下角的解锁开关,轻微推动主控制拨杆。观察四个电机是否转动正常。
设置电机转动方向按照配置界面左上角的图片确认电机转向。如果电机转向有误参照按以下方式修改。
安装螺旋桨电机配置完成后,可以拔下USB数据线,拔出锂电池,合上顶板并安装螺旋桨。 螺旋桨分为正桨和反桨,两种桨叶构造镜像对称,需要结合电机的转向和桨叶的角度进行匹配。安装错误将导致气流反向。 目视飞行测试完成以上所有配置步骤后就可以尝试开始目视飞行。 首次飞行建议开启自稳模式,牢记解锁拨杆位置。可以参考目视飞行的教程熟悉刚拼装完成的穿越机。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed






 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






