|
40557| 0
|
[教程] 跟着思兼学习3D打印 Klipper 固件(01)XY电机方向调整新方法 |

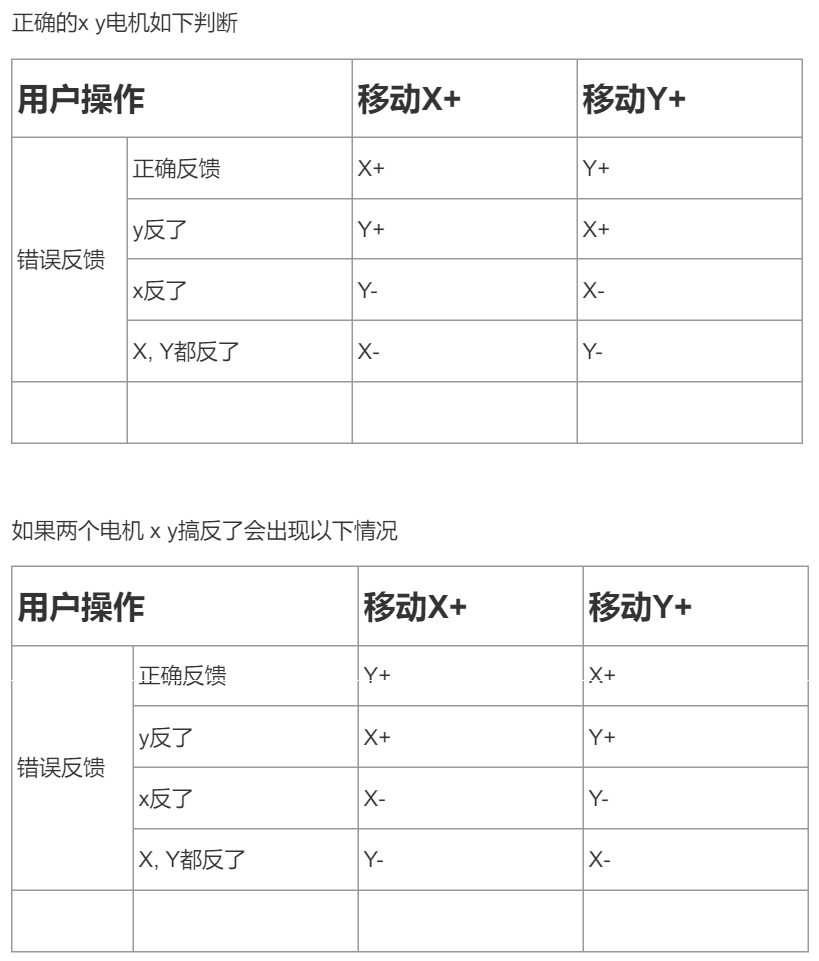
前言原创文章,转载引用请务必注明链接,水平有限,如有疏漏,欢迎指正交流。 本来想要列个大纲,按照计划一篇一篇写,但是后来发现有难有易,所以索性想到哪写到哪,最后再整理汇总,先做出来,再做完美。 3D嘛,由 XYZ 3 个轴构成,常见的 3D 打印机架构有笛卡尔和并联臂等,其中前者可以理解为一个轴由一个步进电机控制,比如 i3 龙门架构;后者一个方向的运动由 2 个以上的电机控制,比如 Delta、CoreXY。由于 Voron 等外观好看的 DIY 开源 3D 打印机的流行以及步进电机绕法的区别,很多朋友安装完毕之后需要调试电机方向。 1、目前的调试方法1.1 图片对比法
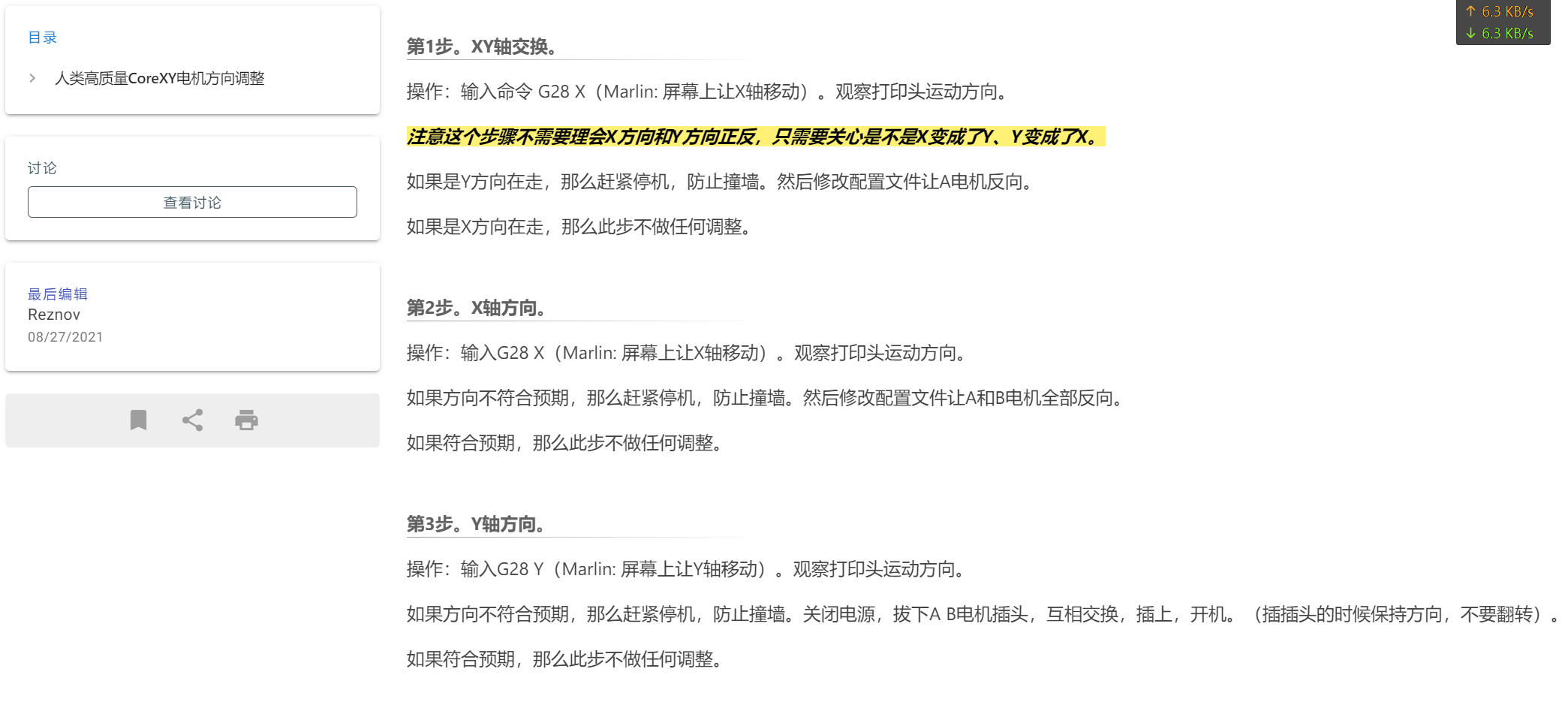
这个比上面的好理解点,起码有文字注释。 1.2 人类高质量CoreXY电机方向调整参考链接:https://wiki.3dphell.com/zh/basic/calibration 也需要三步,如下图所示:
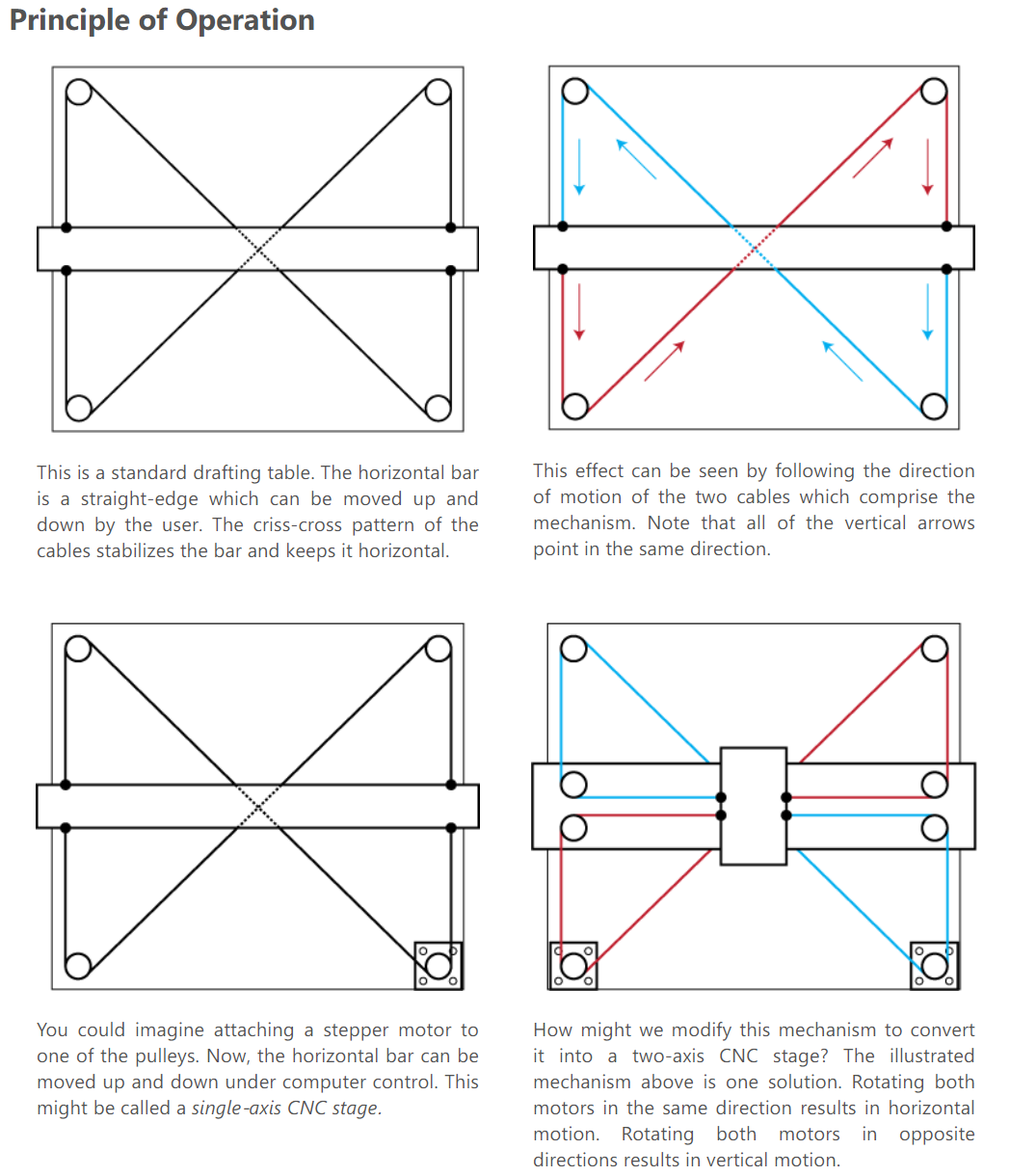
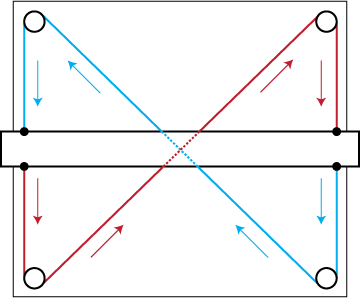
2、我的新调试方法以上方法都需要多次归零(G28)和急停(M112),操作繁琐,理解困难。我的方法只需要运行一个宏,迅速判断出结果,修改一次配置文件。 首先 CoreXY 的官方网站 可以看到其原理图,我们从这里入手。还有一种 H/D-Bot 架构,本文不展开讨论。
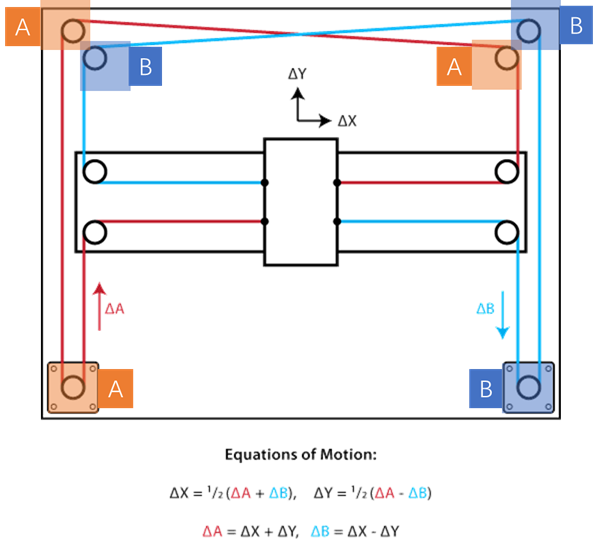
实际的绕线图:
我们首先来分析一下 CoreXY 的特点:
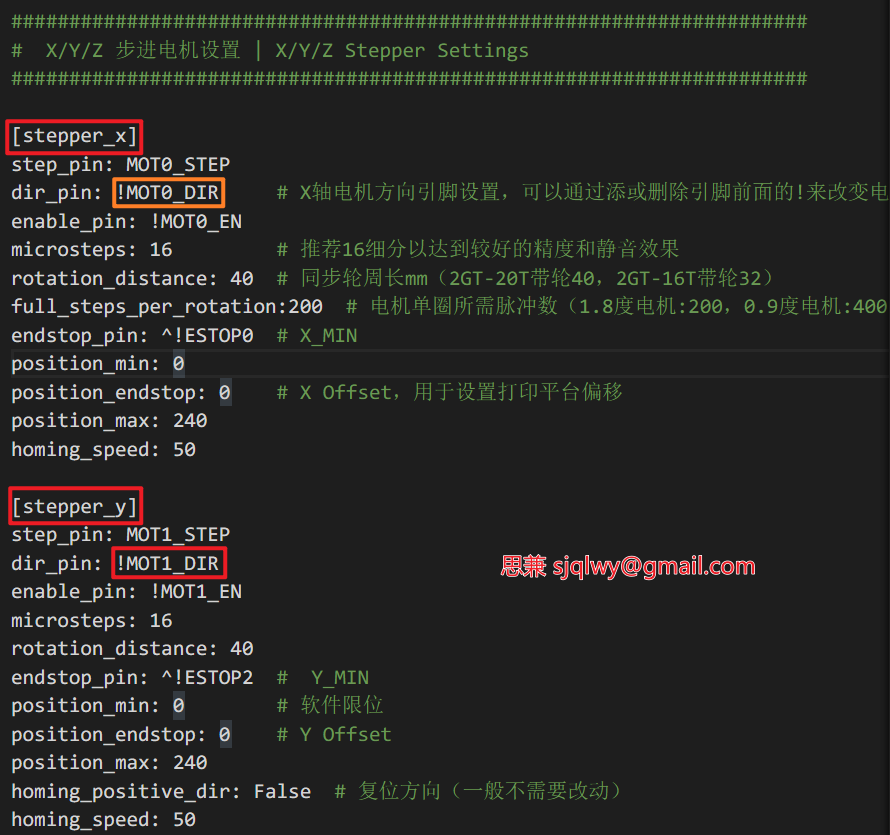
之前存在的两种的方法之所以复杂,是因为归零操作一直需要两个电机共同参与,那如果我们观察斜 45° 挤出头的运动方向,此时就像简单的 i3 架构,其运动方向仅一个电机参与,那么就可以快速确认电机方向。 4.1 启用强制移动方便调试由于 Klipper 的保护措施,只有归零后才能控制轴移动,所以我们要解除这一限制。参考文档。 同时,为了防止喷嘴顶到热床,我们先把 Z 轴归零,然后挤出头离开热床 30mm(此过程可以使用下方的宏)。再把挤出头手动移到热床中间,防止调试过程中撞到框架。 4.2 控制单个电机由于我们仅需要控制一个电机,无法使用诸如
我们记下挤出头两次的移动情况,对照这个图,理论上
后记这种方法个人测试下来还是非常方便的,只需要执行一次宏,就可以快速确认电机方向,适合我这种懒人。后续会分享其他更多好玩、无聊的功能。 |
 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






