|
7658| 2
|
[ESP8266/ESP32] FireBeetle 给万用表增加语音功能 |

|
万用表是电子工程师最常用的调试工具。一些情况下,使用者只能专注于表笔本身而没有机会抬头去看读数,针对这种情况,这次使用 FireBeetle 来改造胜利86B万用表,给它添加一个语音功能。 胜利 86B 这款万用表的特别之处在于带有 USB 接口,安装驱动程序和上位机程序之后可以在电脑上直接查看测量结果。这次的作品,就是通过 USB Host 来实现读取万用表发送过来的数据,然后解析之后通过语音模块将测量结果通过语音播报出来。 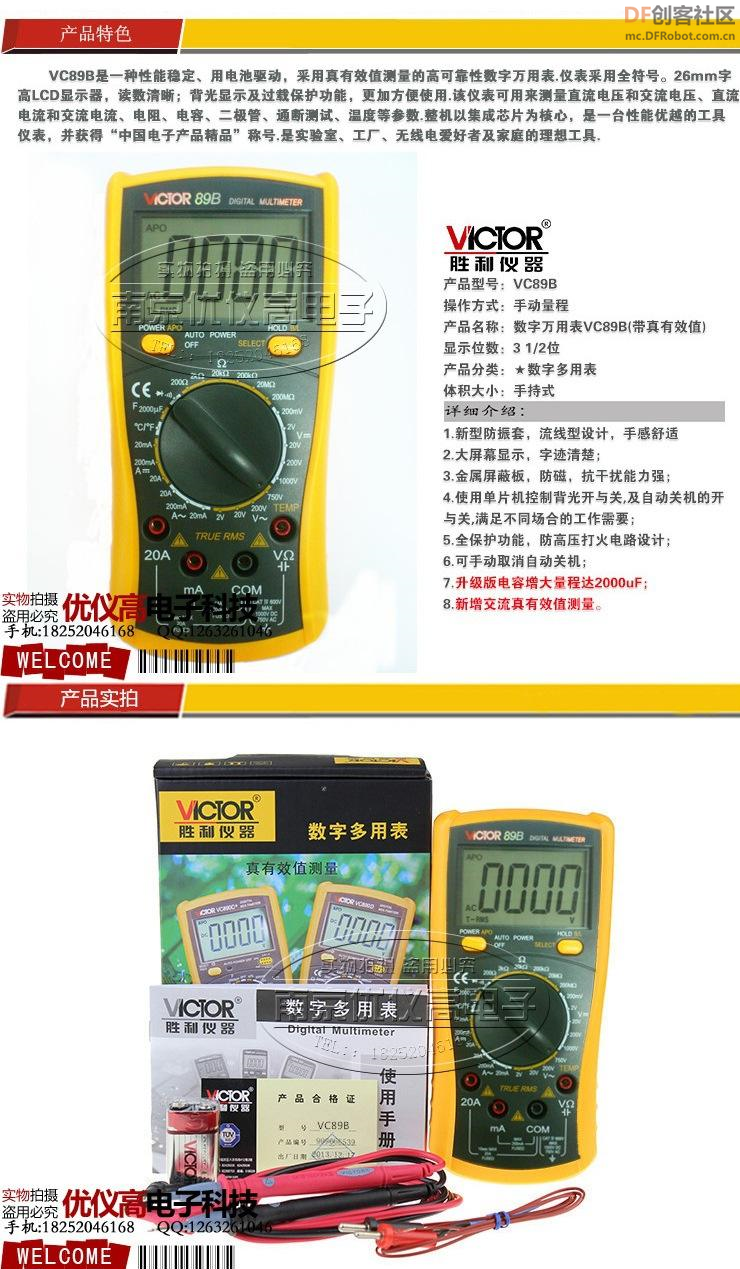 硬件部分主要使用了如下三个元件: 1. FireBeetle ,这次仍然使用基于 ESP32 的 FireBeetle 模块;  2. USB Host Shield,具体设计可以在这个贴子 https://mc.dfrobot.com.cn/thread-309553-1-1.html看到; 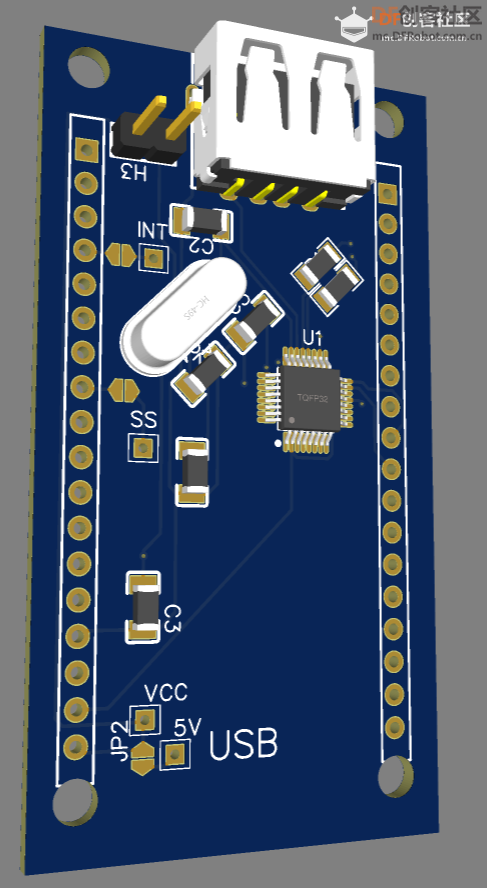 3. Gravity: 中英文语音合成模块(https://www.dfrobot.com.cn/goods-3014.html)  接下来,首先进行硬件设计。关于 USB Host Shield 的设计可以在前面提供的链接中看到。这次着重介绍用于三个模块彼此连接的底板,电路图如下,可以看到只有连接器件,并没有功能性元件。板子上有一个 USB 公头,可以用于供电,当然也可以直接通过 FireBeetle 上面的 USB 接口来为整个系统供电。途中 P1 是用于连接出发开关的接头,这次设计使用踏板作为开关触发语音;语音模块是通过 UART来和 FireBeetle 进行通讯的,使用 Serial2。 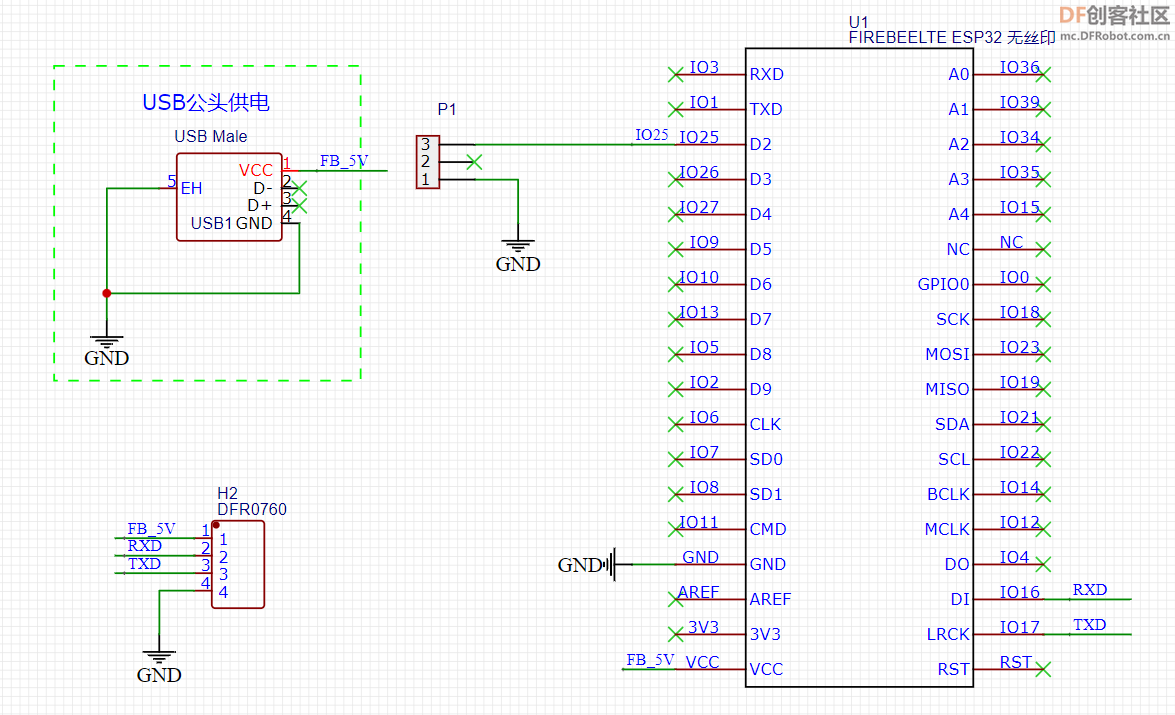 PCB 设计如下: 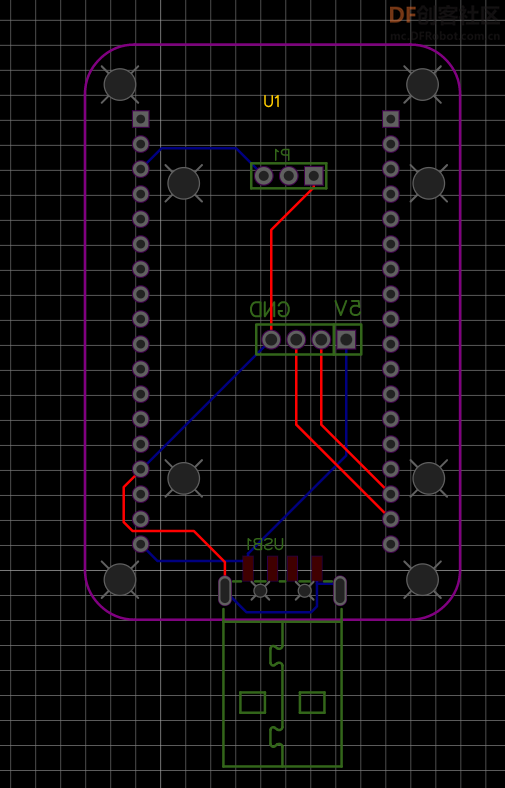 成品PCB 和安装之后的照片如下: 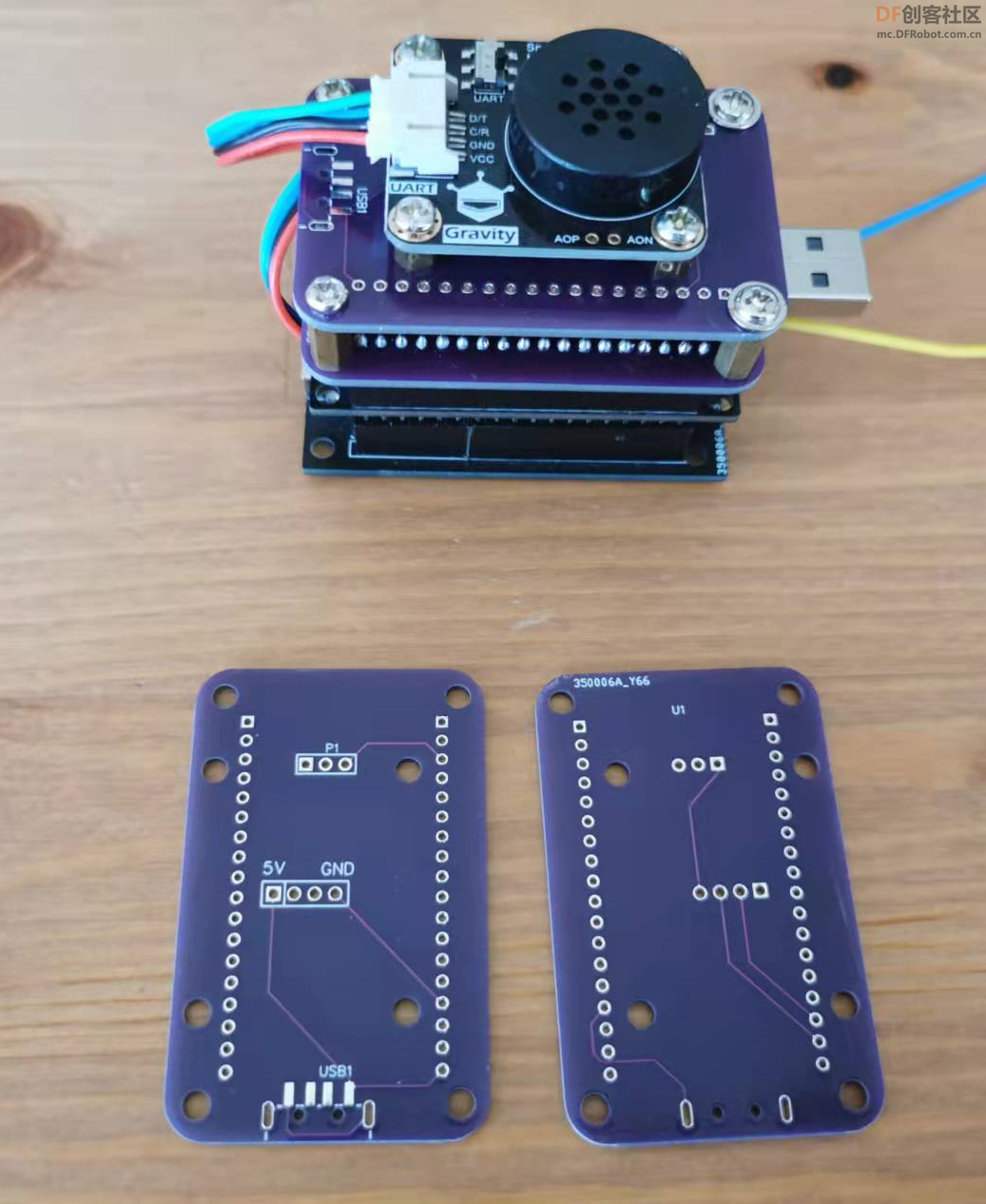 上面就是硬件设计的相关内容,接下来讲讲述软件部分。 首先介绍如何从Victor86B 获得信号,前面提到它带有 USB 接口,从PC端查询 VID 和 PID 可以得知,内置了一个 CP2102 的串口芯片,因此,首要问题是 USB Host 如何同 CP2102进行通讯。在 https://github.com/henla464/USB_Host_Shield_Library_2.0 这里可以找到一个 USB Host 支持 CP2102 的代码。这样就能够获得Victor86B 发出的数据。接下来的问题是收到数据解析的问题,经过研究总结如下:
结合实际数据进行解说,例如,Victor86B 发出的一组数据如下:
Victor86B 上用于显示数据的数码管段位如下: 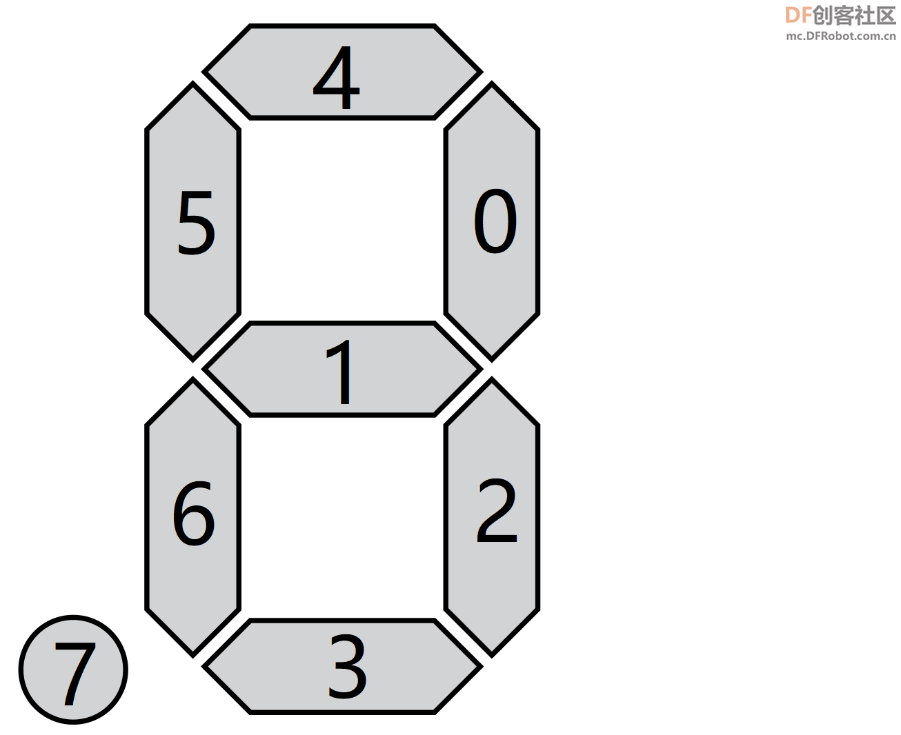 例如,实际数据上的Byte1,2分别为0x27和 0x3D,对于用户来说有效数据是 0x7D, 转化为二进制之后是 0x0111 1101 ,对应在上面数码管上,可以看到 Bit0/2/3/4/5/6 是点亮的,因此,用户看到的是0。同样的,百位十位都是0.  Byte7, Byte8给出的值是 0xFE 对应二进制位 0x1111 1110,用上述方法计算点亮值为6,因为 Bit7 为1,所以还要点亮最前的小数点 因此,前面完整数值是000.6.继续查看 Byte0xA Bit3 表示 m,Byte0xCBit2 表示 mV ,因此上述数值完整含义为 000.6mV。 接下来就可以根据上述知识编写代码。特别需要注意的是:USBHost 无法保证每次完整收取指定长度的数据,比如,前面提到 Victor 86B 每次有效数据是14Bytes,但是使用 cp210x.RcvData() 函数有可能只接收到6Bytes,因此需要有一个拼接动作,只有接收到 14Bytes之后才进行解析。这个过程的流程图如下: 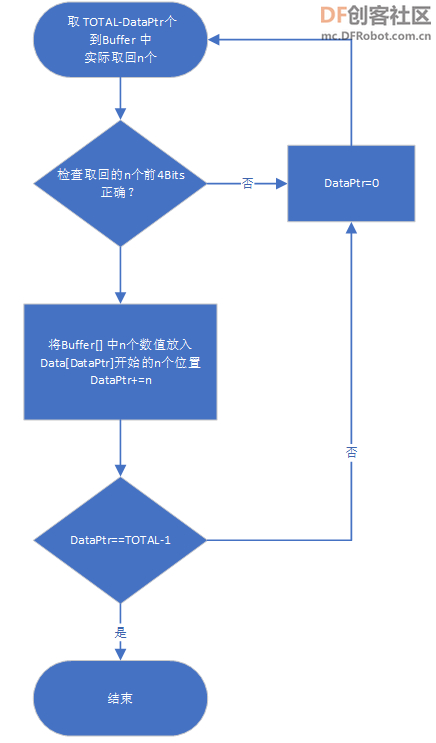 接下来介绍语音输出,首先需要注意的是这次使用串口,需要将 Gravity中英文语音合成模块上的开关波动到 UART位置。汉字是 Unicode 编码,每一个字占用 3Bytes。、 在文件头部引用库 #include "DFRobot_SpeechSynthesis.h" 再声明一个对象 DFRobot_SpeechSynthesis_UART ss; 之后就可以使用 ss.speak(Buffer); 播放Buffer 中定义的中英文字符串。此外,还有一个需要注意的是:这个DFRobot_SpeechSynthesis库默认是同步播放。意思是调用播放函数后会处于这个函数中直到语音播放完成。这就造成了 USB 相关函数被阻挡,USB消息无法及时处理的问题。因此,会出现工作中 ESP32重启的问题。为了解决这个问题,我修改了 DFRobot_SpeechSynthesis 库,去掉了void DFRobot_SpeechSynthesis::wait() 函数的等待代码。这样即可将Speak 从同步修改为异步,当然响应的还有一个延时操作,保证不会出现一段语音没有播放完成就转去播放另外语音的情况。 最终照片如下: 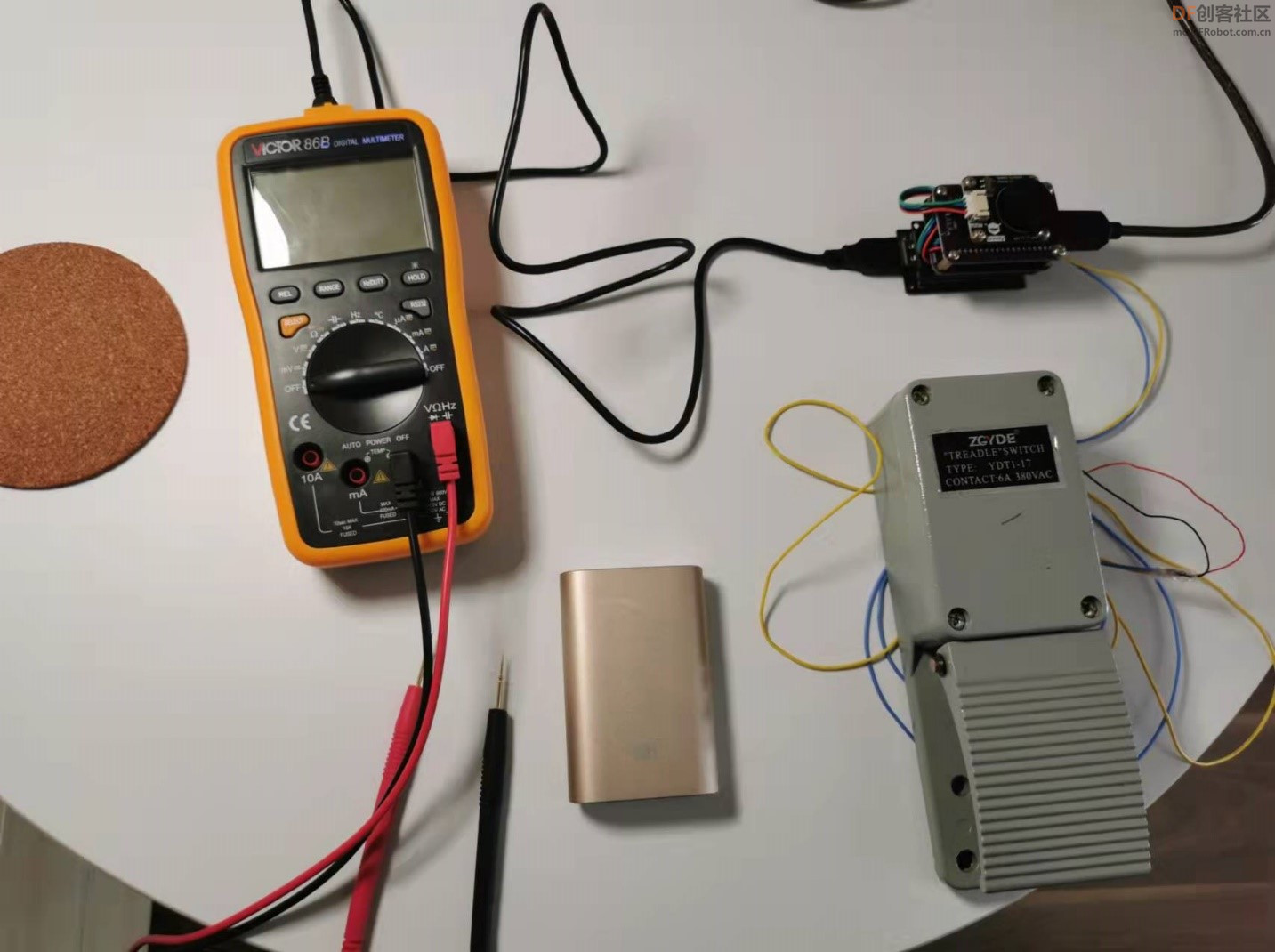 |
 创客造
创客造
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶
 语音合成喜欢
语音合成喜欢






