|
13906| 15
|
用Arduino自制一个只有表针,没有表盘的“空心时钟” |

本帖最后由 RRoy 于 2022-6-1 16:15 编辑  祝大家端午节快乐! 这周我们来一起看看如何用Arduino自制一个只有表针,没有表盘的“空心时钟”。 看起来还是挺炫酷的,再放几张网友们参照教程做的图欣赏一下:   ▲ 视频演示材料 准备
这个时钟可以用大多数常见的200 x 200mm打印机打印,除了装饰部分(index.stl,203 x 203mm)。 文章最后还有一个缩小小的版本(85%)。 文中所有的涉及的STL文件可以到文末下载。 第1步:打印零件 
相关STL文件可以到文末下载。 第2步:组装蜗杆传动系统 



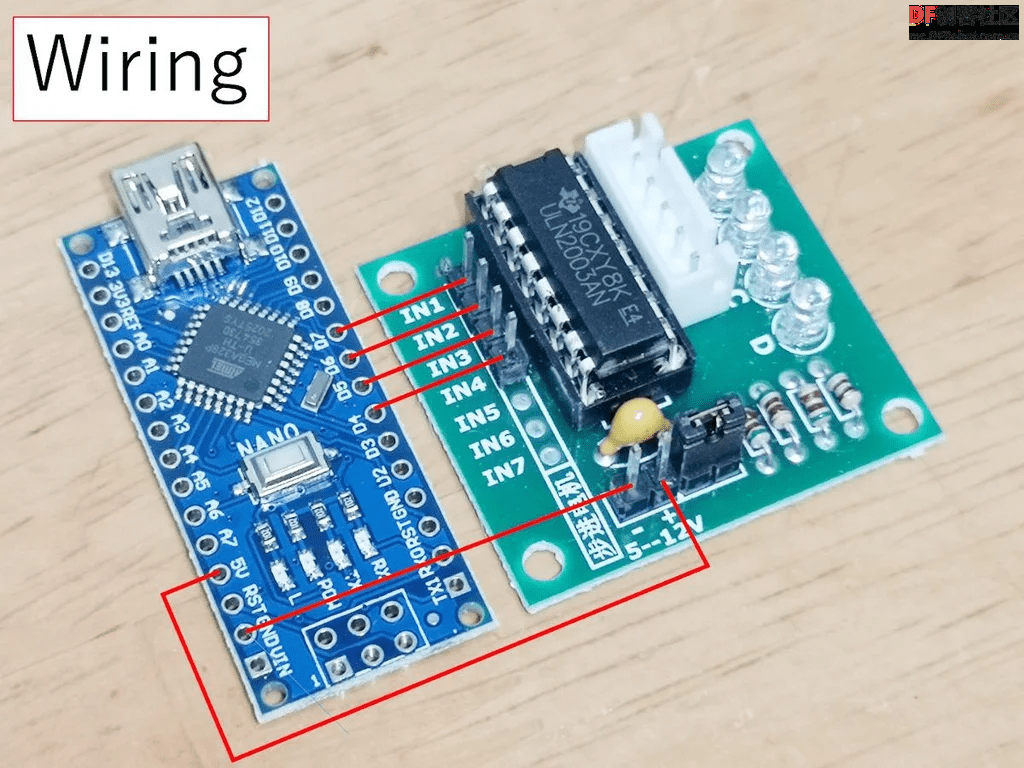  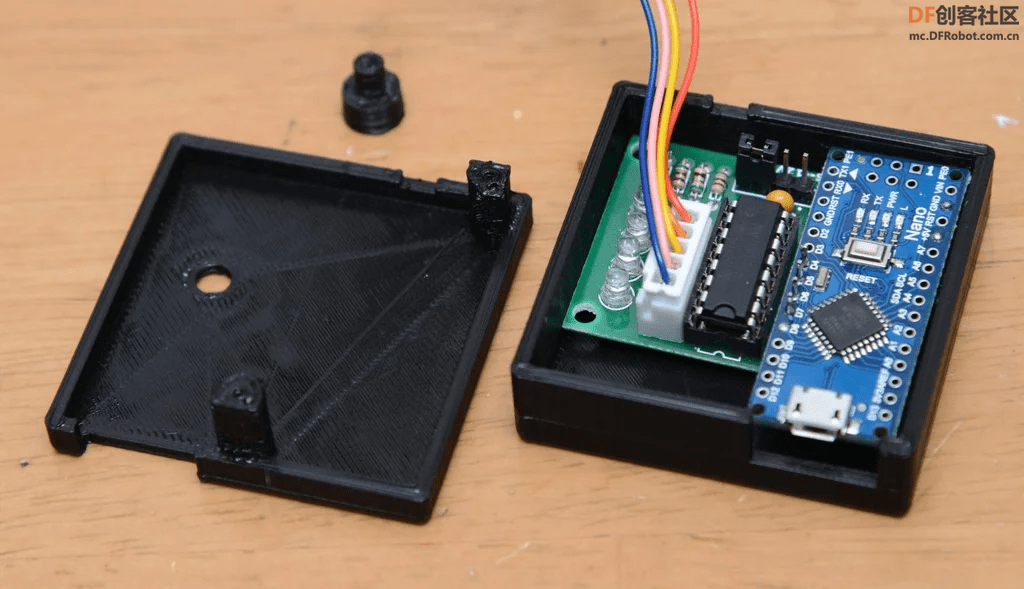 
如果你想把整个电路封闭起来放到盒子里,可以打印零件做个盒子(相关文件放在文末)。 然后用两个2毫米的自攻螺钉来组装起来。 第7步:程序 将代码闪到Arduino上。把代码上传到Arduino IDE 上。 如果你的电机跑错了方向,请修改代码中的数字顺序: int port[4] = {4, 5, 6, 7}; 改为 int port[4] = {7, 6, 5, 4}; 这上面的数字和Arduino Nano的针脚有关(D4-D7)。 完整代码如下: // Please tune the following value if the clock gains or loses. // Theoretically, standard of this value is 60000. #define MILLIS_PER_MIN 60000 // milliseconds per a minute // Motor and clock parameters // 4096 * 110 / 8 = 56320 #define STEPS_PER_ROTATION 56320 // steps for a full turn of minute rotor // wait for a single step of stepper int delaytime = 2; // ports used to control the stepper motor // if your motor rotate to the opposite direction, // change the order as {4, 5, 6, 7}; int port[4] = {4, 5, 6, 7}; // sequence of stepper motor control int seq[8][4] = { { LOW, HIGH, HIGH, LOW}, { LOW, LOW, HIGH, LOW}, { LOW, LOW, HIGH, HIGH}, { LOW, LOW, LOW, HIGH}, { HIGH, LOW, LOW, HIGH}, { HIGH, LOW, LOW, LOW}, { HIGH, HIGH, LOW, LOW}, { LOW, HIGH, LOW, LOW} }; void rotate(int step) { static int phase = 0; int i, j; int delta = (step > 0) ? 1 : 7; int dt = 20; step = (step > 0) ? step : -step; for(j = 0; j < step; j++) { phase = (phase + delta) % 8; for(i = 0; i < 4; i++) { digitalWrite(port, seq[phase]); } delay(dt); if(dt > delaytime) dt--; } // power cut for(i = 0; i < 4; i++) { digitalWrite(port, LOW); } } void setup() { pinMode(port[0], OUTPUT); pinMode(port[1], OUTPUT); pinMode(port[2], OUTPUT); pinMode(port[3], OUTPUT); rotate(-20); // for approach run rotate(20); // approach run without heavy load rotate(STEPS_PER_ROTATION / 60); } void loop() { static long prev_min = 0, prev_pos = 0; long min; static long pos; min = millis() / MILLIS_PER_MIN; if(prev_min == min) { return; } prev_min = min; pos = (STEPS_PER_ROTATION * min) / 60; rotate(-20); // for approach run rotate(20); // approach run without heavy load rotate(pos - prev_pos); prev_pos = pos; } 第8步:测试和调整 
你还可以在https://www.thingiverse.com/thing:5142739 的评论中找到一些有用的信息。 第9步:调整时间

STL文件同样打包好了放在下面的链接里。 原文链接:https://www.instructables.com/Hollow-Clock-3/ 原项目作者: shiura 译文首发:DF创客社区 开源项目,转载请务必注明项目出处与原作者信息 |

1.49 MB, 下载次数: 9831



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








 萌萌哒新人
萌萌哒新人
 宣传大使
宣传大使
 小蘑菇
小蘑菇
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






