|
8317| 7
|
废旧鼠标改造计划!摇身变成灵活的鼠标机器人! |

|
本帖最后由 RRoy 于 2022-8-25 11:29 编辑 今天和大家分享一个把废旧鼠标改成真正的机械鼠的项目。 非常有意思~  这个项目中的鼠标机器人只使用了2个电机、3个开关和2枚电池。 当鼠标机器人的胡须碰到了障碍物,该侧的开关就会 "打开",另一侧的电机短暂地逆转,然后鼠标机器人就会略微转弯来避开障碍物,继续前进。 材料  部件
工具
第1步:确定零件的位置 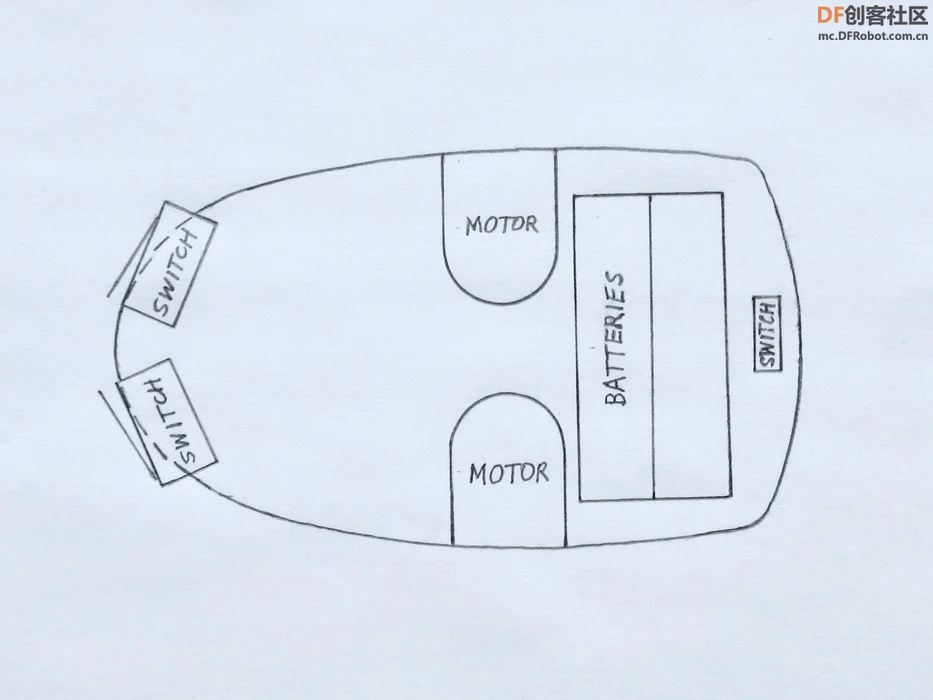 拆下鼠标盒的外壳后,取出电路板和里面的所有零件。 先把这些零件放一边,在以后可能会用到。 球型鼠标的电路板上有2个用于鼠标按钮的开关,2个红外发射器(通常是透明的),2个接收器(通常是黑色的)和一些其他部件。 把USB电线剪成大约10厘米,作尾巴。 下面我们来规划一下,我们的电机、开关、电池分别放在哪些位置。 电机应该在中间; 微型开关必须在前面,而电池座和开关可以放在任何一个位置。 上图是作者的鼠标部件布局。 开关可以作为鼠标机器人背面的支撑,略微偏离中间,这样当开关是“开”的状态的时候,正好在中间。 第2步:准备外壳 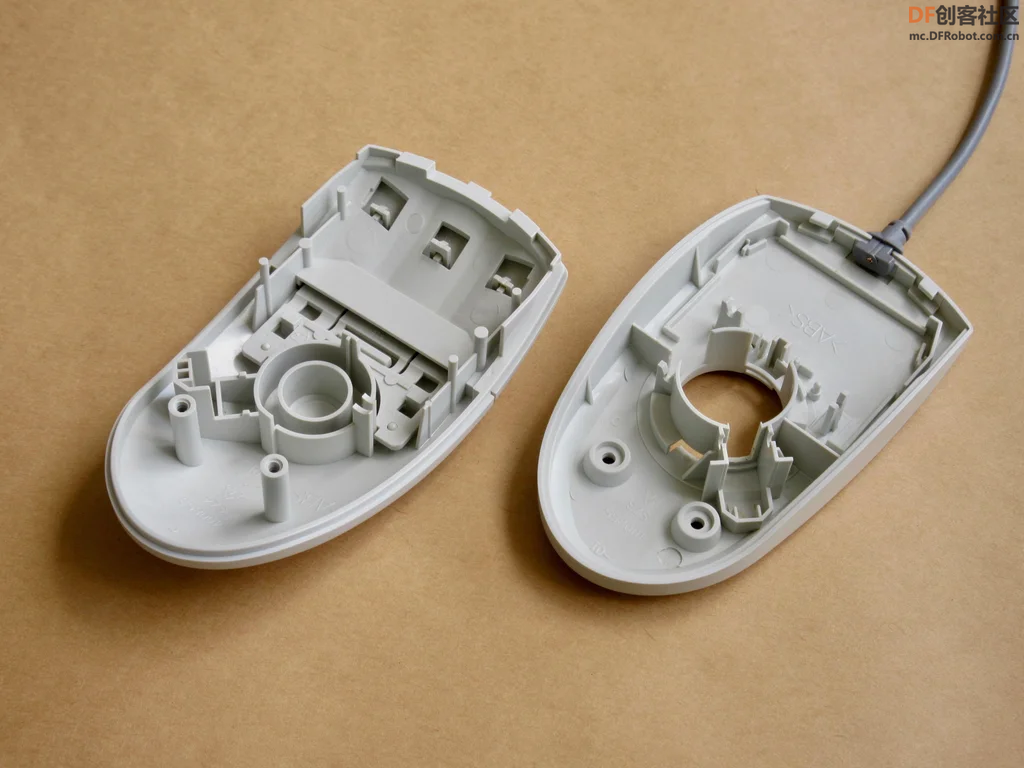  拆开鼠标之后,我们把妨碍安装电机和电池的部分塑料剪掉。 另外,给电机和开关开孔。 上图是鼠标外壳的顶部和底部的前后对比情况。 第3步:电机部分 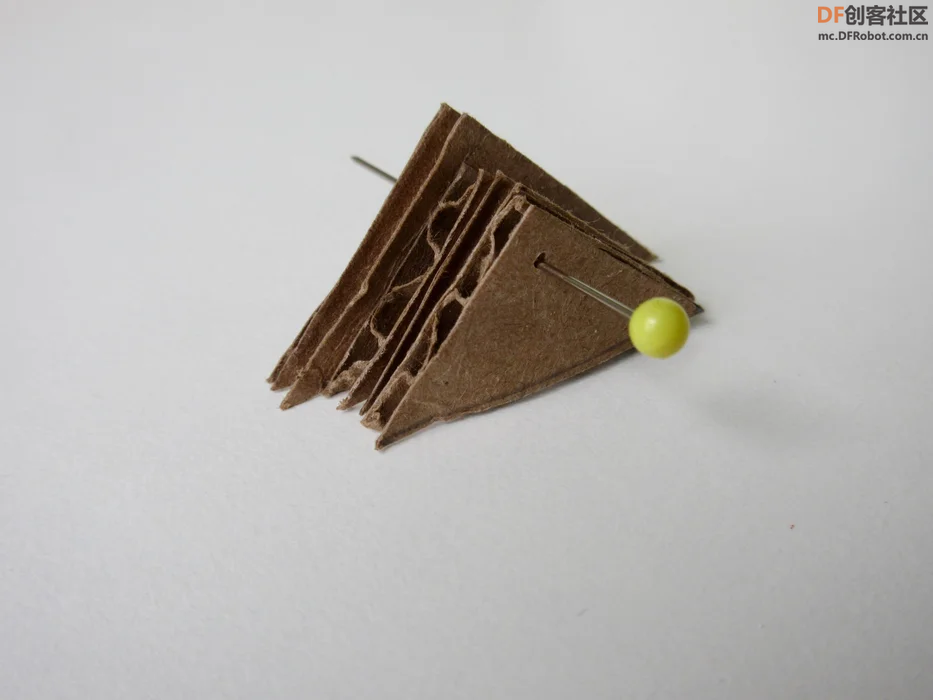 电机轴需要有一定的角度,以便它们能够支撑鼠标机器人,并且在旋转时能够移动。 在项目中,电机必须要有大约45度的角度,好适应鼠标盒的顶部和底部布局。 要把电机固定在适当的位置进行胶合是很困难的,所以这边用瓦楞纸板做了一个支撑,如图所示。这些纸片是从一块大的纸板的角上剪下来的。角落的边缘呈90度,这对于把电机分别固定在45度的位置是很完美的。 销子有助于在胶合时将纸片固定在原位。 把纸板支架粘在鼠标底壳内,等待一段时间让胶水完全凝固后,可以把电机一起粘到支架和底壳上。 电机轴太光滑,在旋转时无法让鼠标运动。我们可以通过在轴上加小块的热缩管来解决。热缩管的两头在两个马达上伸出相同的距离,这样它们就能和鼠标机器人运行的表面有相同的接触了。 在这个项目中,热缩管没有很好地粘在轴上,所以看到作者在热缩管的上面涂了一些胶水。 第4步:接线  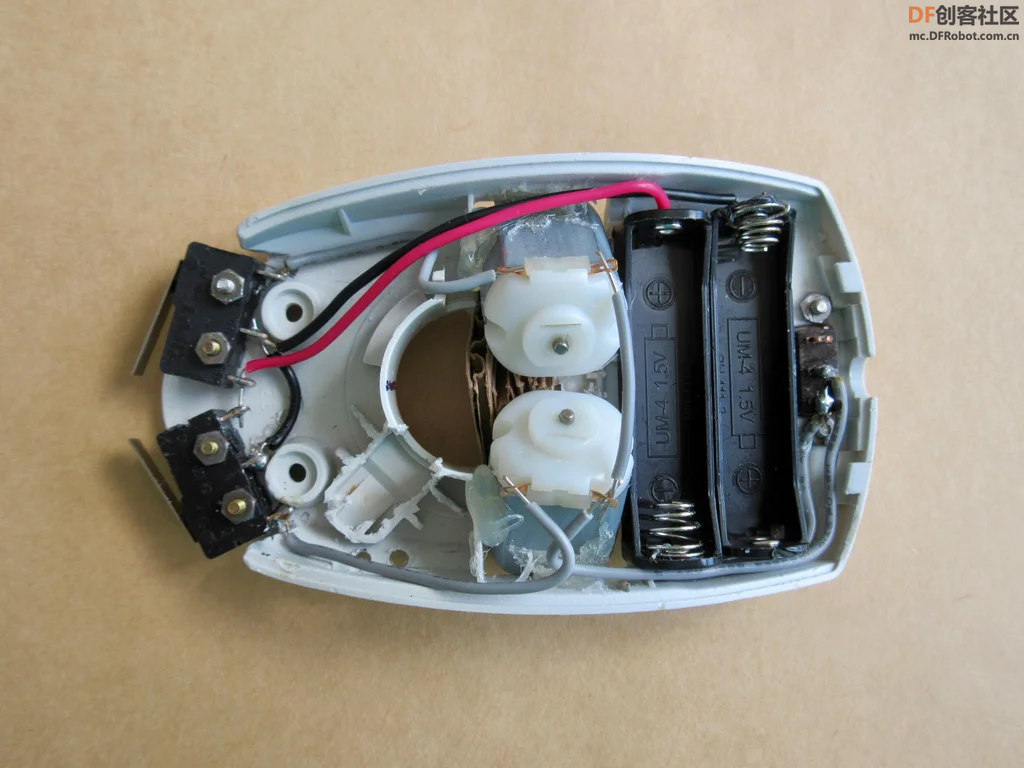 第一张照片展示了部件的接线方式,第二张照片是已经接好线的鼠标机器人。 连接电机的电线最好剪得足够长,好方便在某个电机旋转方向错误时需要调换电线。 确定电机旋转方向正确之后,我们再焊接。 第5步:制作“胡须”  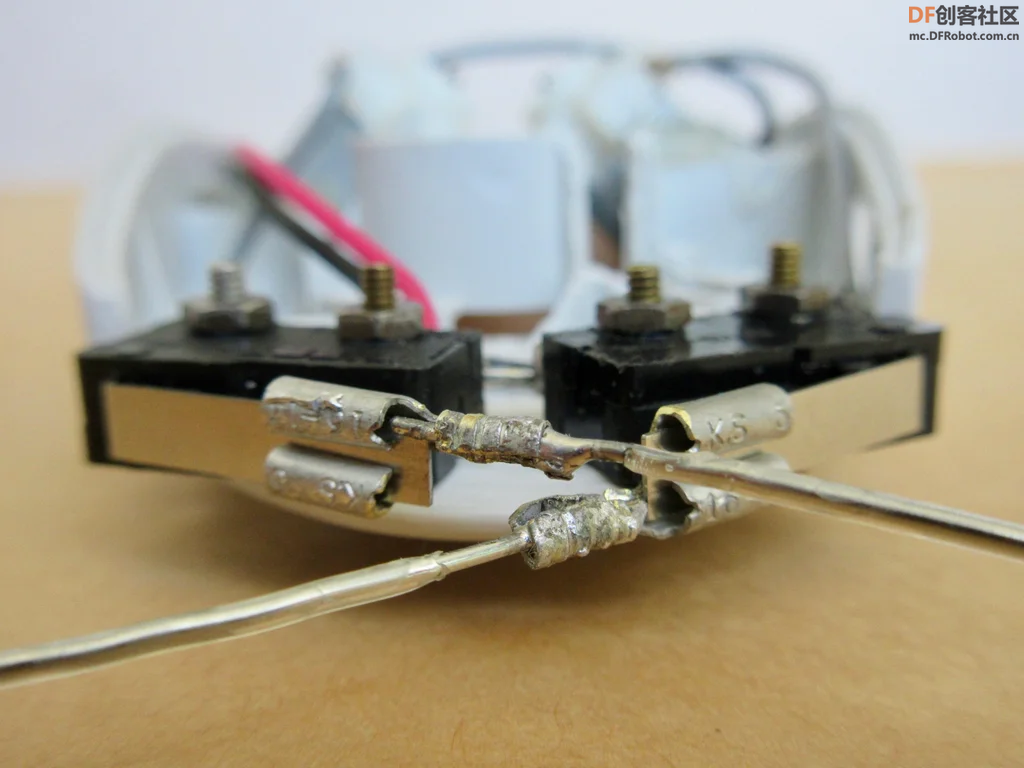 胡须是由回形针制成并连接到微动开关杠杆上的。 与其将回形针焊接在开关杠杆上,不如用连接器连接起来,这样如果需要调整或更换,就可以很容易地将其取出,具体步骤如下:
第6步:测试 在将鼠标盒盖上之前,我们把鼠标开关"打开 "并放在地板上测试一下,确保一切正常。 这是一个比较简单的项目,然而,还是可能会有许多小问题。 如果鼠标机器人只是原地旋转,可能是其中一个电机上的电线连接(此时未焊接)可能没有正确接触,或者其中一个电机的转动方向错误,或者一个电机上的热缩管已经脱落。首先检查电线的连接,然后,如果热缩管连接得很好,应该在旋转的内侧的电机上换线。 如果鼠标机器人是绕着圈子向前跑的,那问题不大,除非圈子非常小。可能有几个原因:一个马达可能比另一个转得快;或者两个马达与垂直方向的角度不完全一样;或者一个马达上的热缩管略有滑动;或者一个轴上的管子比另一个轴上的短。 用一只手握住鼠标机器人,按下其中一个开关,看看另一边的电机是否开始向后旋转而不是向前旋转,然后试试另一个开关。 如果鼠标机器人在撞到障碍物时没有轻微转动,说明该侧的微动开关没有被 "打开"。发生这种情况有几个原因。 如果鼠标机器人撞到了圆形障碍物的中间或方形障碍物的一角,两根胡须都可能被压得很远,以至于开关无法 "打开"; 如果障碍物的底部向其一侧略微弯曲,那么“胡须”可能在鼠标机器人接触障碍物之前没有接触到; 或者,这可能是由于“胡须”被其他“胡须”挡住了而造成的。 通过移动微动开关杆上的连接器,可以将“胡须”稍微向上或向下调整。如果“胡须”太低,回形针可能需要向上弯曲。 当鼠标机器人运行正常,可以把电机的电线焊接起来。 第7步:眼睛和胡须 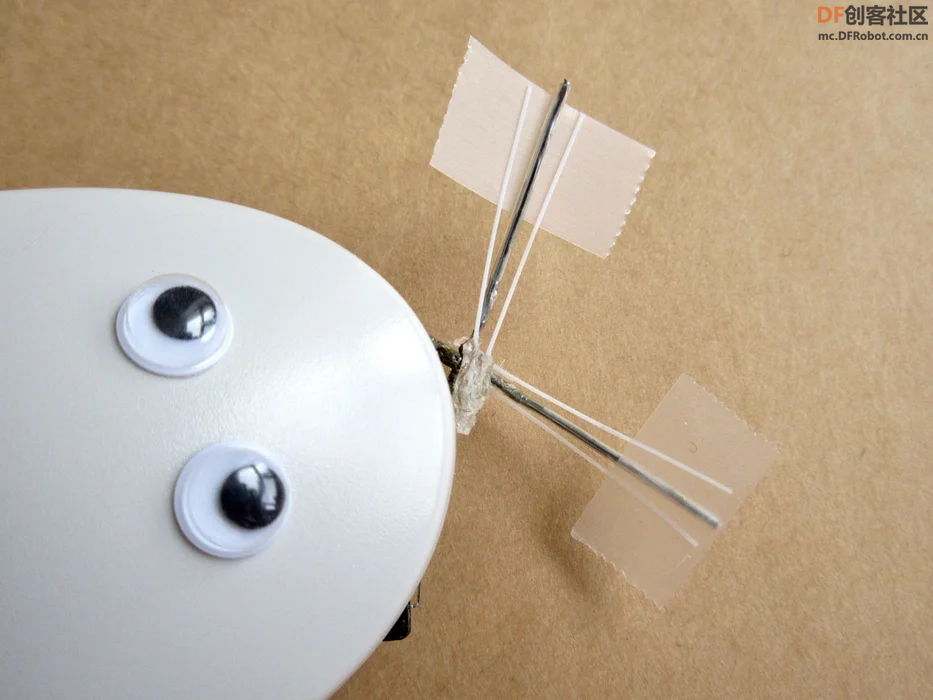 合上鼠标盖子,把小眼睛粘在老鼠机器人的盖子上。 可以用刷子毛粘在连接器上,作为额外的胡须装饰。 如图所示,用胶带固定一下。 这样就大功告成了! 原文链接:https://www.instructables.com/PC-Mouse-Becomes-a-Robot-MouseBot/ 原文作者:Tony--K 译文首发DF创客社区 转载请注明来源 大家有什么想说的,欢迎在下方留言! 往期项目回顾 ▼ 仿生电子鼠来了!载重物、爬窄管不在话下,跌倒还能自己站起来  ▼ 用Arduino自制一个小型蜘蛛机器人  ▼ 自制一个遥控六足机器人  ▼ 动手做一只基于ESP32的小型四足机器狗  ▼ 能跑能跳能遛弯儿,波士顿动力Spot的小跟班来了!  ▼ 可扩展性高,四足机器人斯坦福Pupper的小弟来了!  ▼ 如何用ESP32-CAM和3D打印件做一个Strider摄像机器人  |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶





 萌萌哒新人
萌萌哒新人
 宣传大使
宣传大使
 小蘑菇
小蘑菇
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 摸鱼团员
摸鱼团员
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖
 编辑选择奖
编辑选择奖






