|
3381| 4
|
[教程] MicroBlocks 编程案例: 正中靶心! |
本帖最后由 种瓜 于 2022-11-19 21:00 编辑 历史人物胡乱射出一箭, 历史学家在箭的落点画个圈说: 看!他正中靶心!原文地址: MicroBlocks 编程案例: 正中靶心! (编辑文章是遇到一些问题,建议阅读原文) MicroBlocks 中文主页 前言 @leeyve 最近买了两个机器人,问我能否接管它们,使其可编程。我拿来玩了会儿,十分喜欢,于是便着手试着用蓝牙接管它们。 蓝牙黑客的工作主要集中在处理 bytes,只要愿意投入时间,总是可以弄懂传输的信息,更何况身后有伟大的开源社区。 在汇景上课,课间十分钟,完成了第一次控制。 以下是接管之后,在 Python 里对其编程的小例子(近期我们也会将其接入 Scratch) 视频: https://adapter.codelab.club/video/93a6505c3c8ea33485381eb852abda.mp4 https://adapter.codelab.club/video/8c0bfc6508a66d2e5c2ea588bd3dab.mp4 然而,我们今天并不打算讨论蓝牙黑客的技巧,玩一些更有趣的东西。 ps: 如果你对蓝牙黑客感兴趣, 可能会喜欢 btlejack 猜想与反驳 知识,特别是我们的科学知识,是通过未经证明的(和不可证明的)预言,通过猜测,通过对我们问题的尝试性解决,通过猜想而进步的。 – 波普尔《猜想与反驳》 在瞎折腾的过程中,我们发现这两机器人有一种对战模式: 当用户驾驶机器人对战时,如果按下发射按钮,击中对方,另一个机器人会被击败。 机器人并没有真的发出的子弹,另一个机器人如何知道被击中呢? 我猜测,机器人身上带有红外发射器和红外接收器。 猜想的具体内容是: 红外基本沿直线传播,如果一个机器人的红外发射器发出红外线,正好被另一个机器人的红外接收器收到,就产生了 “击中” 事件。 验证我想验证这个想法,于是找来 micro:bit, 翻箱倒柜,从 CodeLab 旧物箱里找到 m5stack 的红外传感器:  在旧物箱里又找到一个不知哪个公司的红外遥控器:  我将红外传感器接到 micro:bit 里,之前没有对红外设备进行编程的经验,但因为有 Microblocks,信心十足,感觉可以搞定它,因为 Microblocks 是一个放大你心智力量的编程环境,对探索和理解事物提醒了绝佳支持。 我将 m5stack 的红外传感器(IN pin)连到 micro:bit 1 号引脚,通过使用 Microblocks 内置的 IR Remote (在 积木库/Other 分类里): 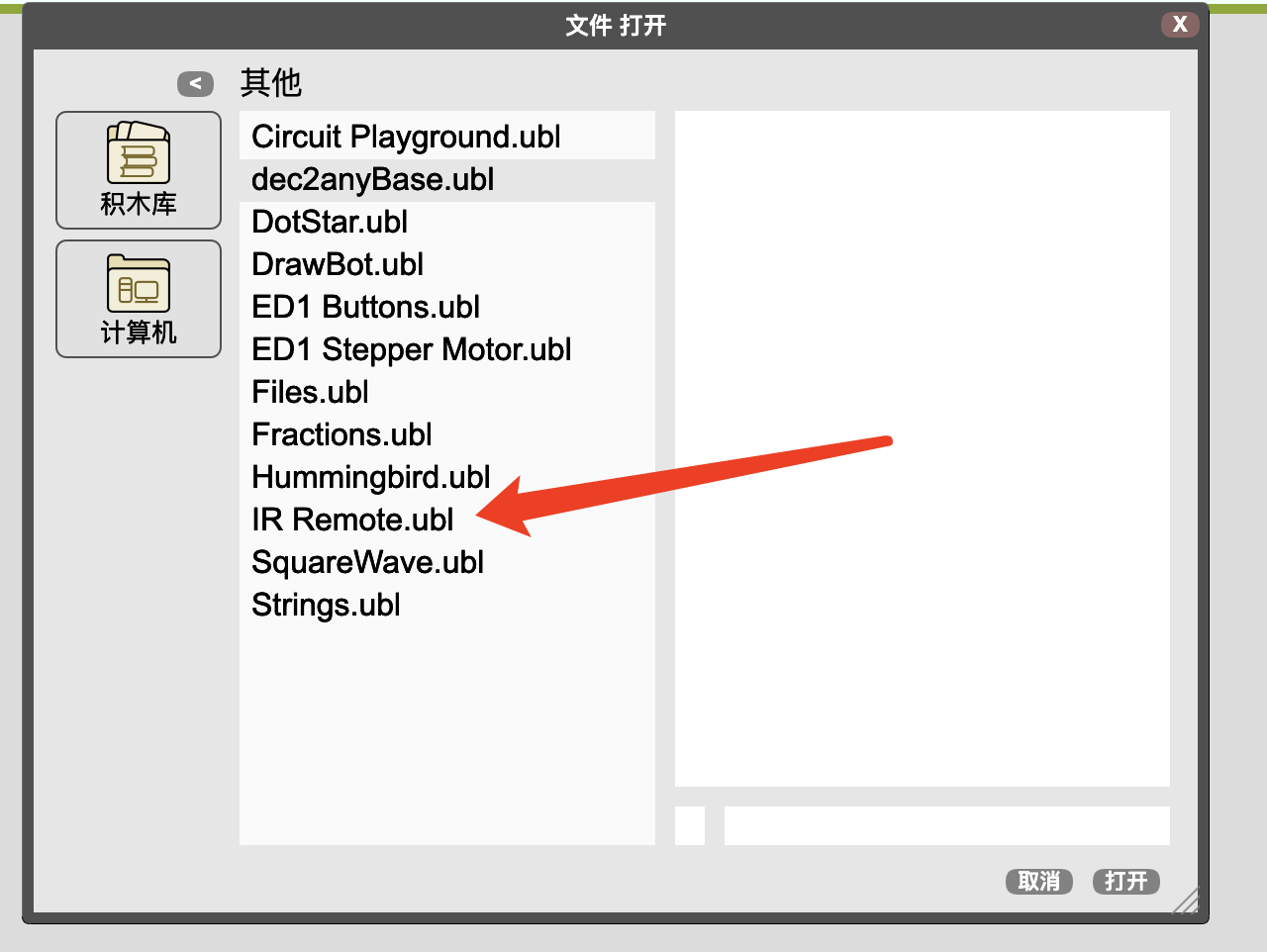 现在,可以实时观察到接受自红外遥控器的信号。  对我们猜想的批判极为重要:通过指出我们的错误,使我们理解我们正试图解决的那个问题的困难。就这样我们越来越熟悉我们的问题,并可能提出越来越成熟的解决:对一个理论的反驳——即对问题的任何认真的尝试性解决的反驳——始终是使我们接近真理的前进的一步 – 波普尔《猜想与反驳》 我开心地跑到隔壁办公室准备拿小黄人机器人试试。 @leeyve 和 @leon 正在折腾它,我让他们操控机器人朝我的红外接收器发射,结果一无所获,我们的猜想似乎被实验反驳了。  我猜想,有两种可能:
如何验证「猜想 2」呢?我需要拆开红外积木,看看它是如何处理红外信号的,和大多数积木化平台不同, Microblocks 对于深入理解事物的机制,提供了绝佳的支持,你可以在其中自由探索。 于是我打开积木的定义: 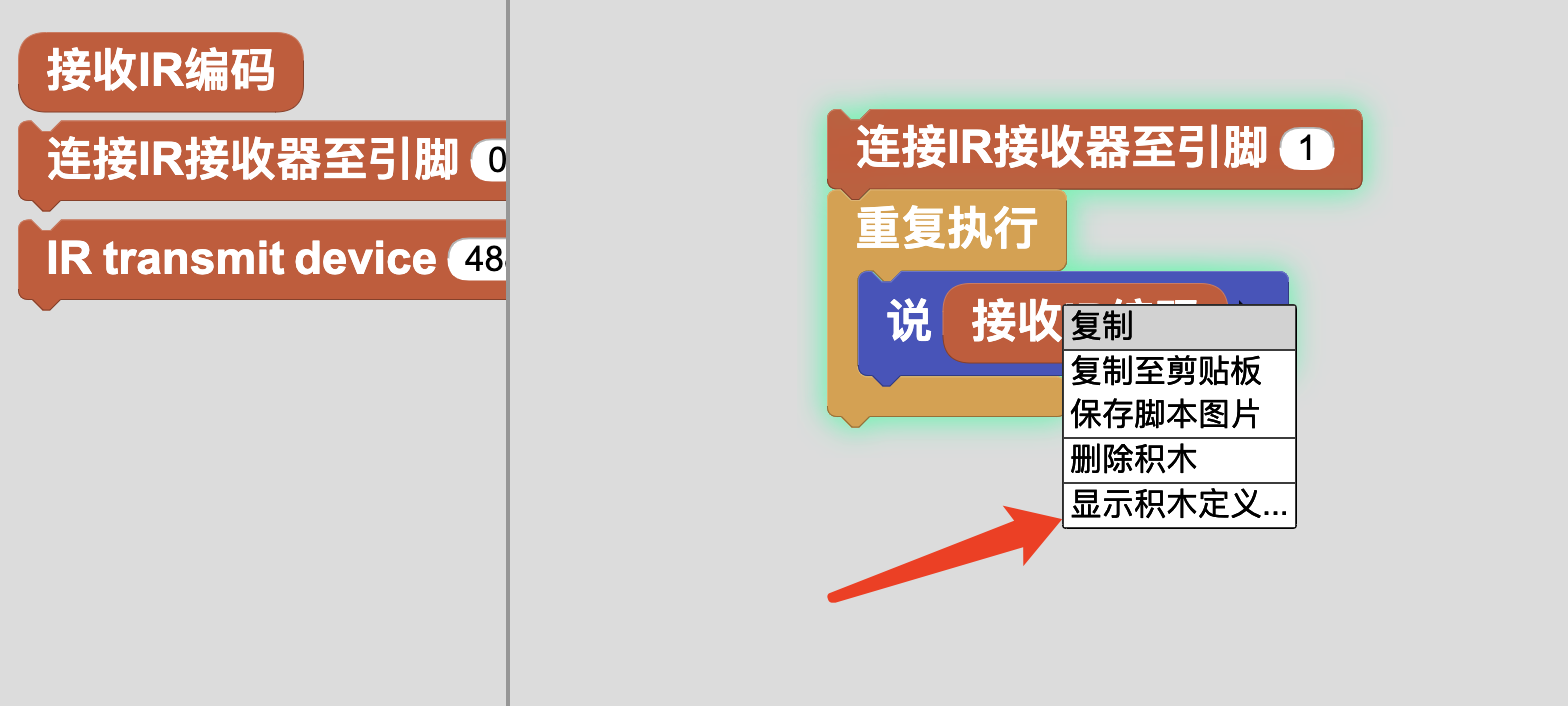 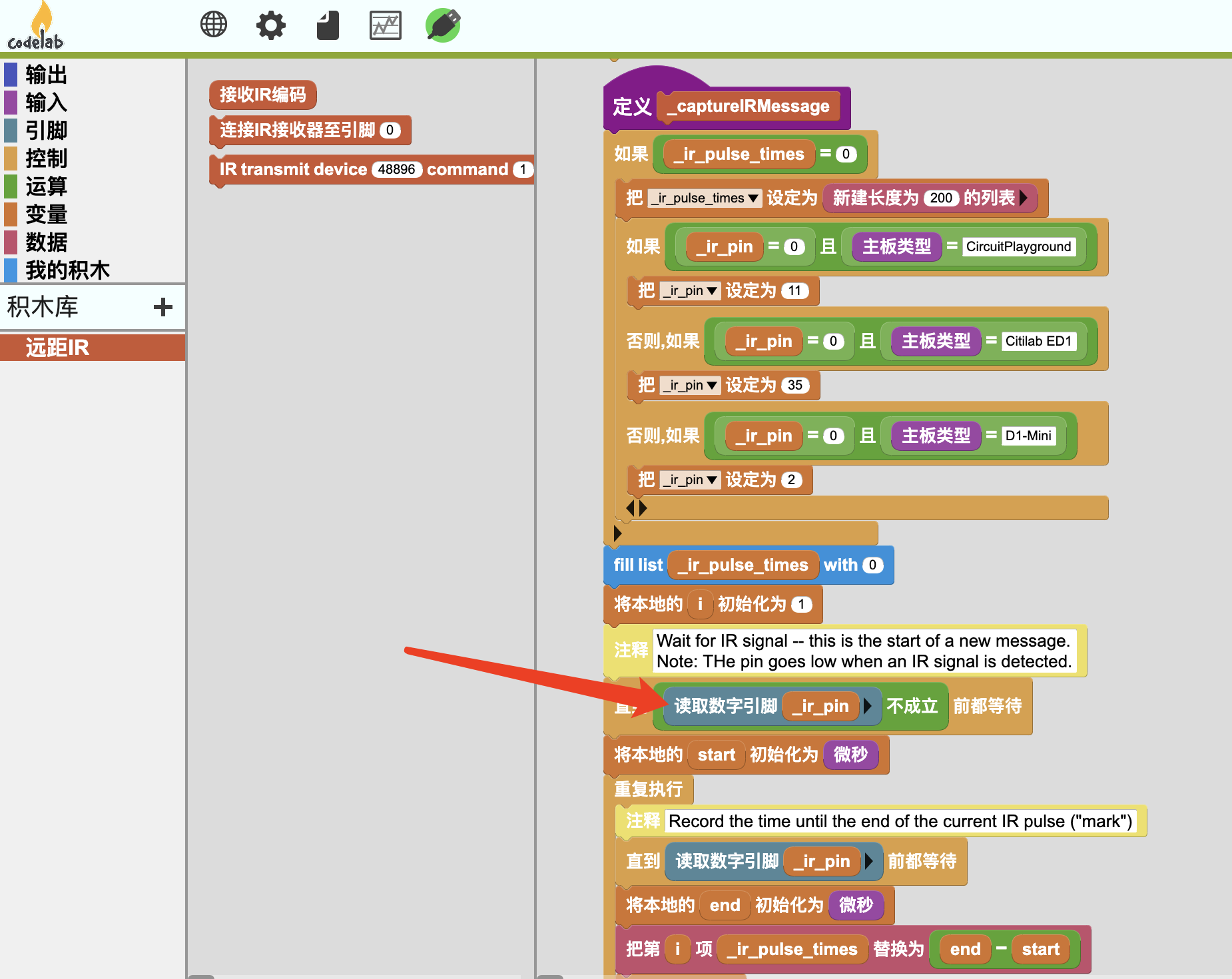 通过查看积木定义,大致了解了其工作原理。回到我们的 「猜想 2」: 2 机器人确实发射了红外线,但目前 Microblocks 插件对红外的解码机制与机器人发射红外时的编码机制不同,所以无法得到有意义的内容。 为了绕开红外的解码机制,我打算直接使用定义里看到的 读取数字引脚。 如果小黄人确实发射红外,那么我们就会收到红外,并显示被枪击中(用于实时调试)。 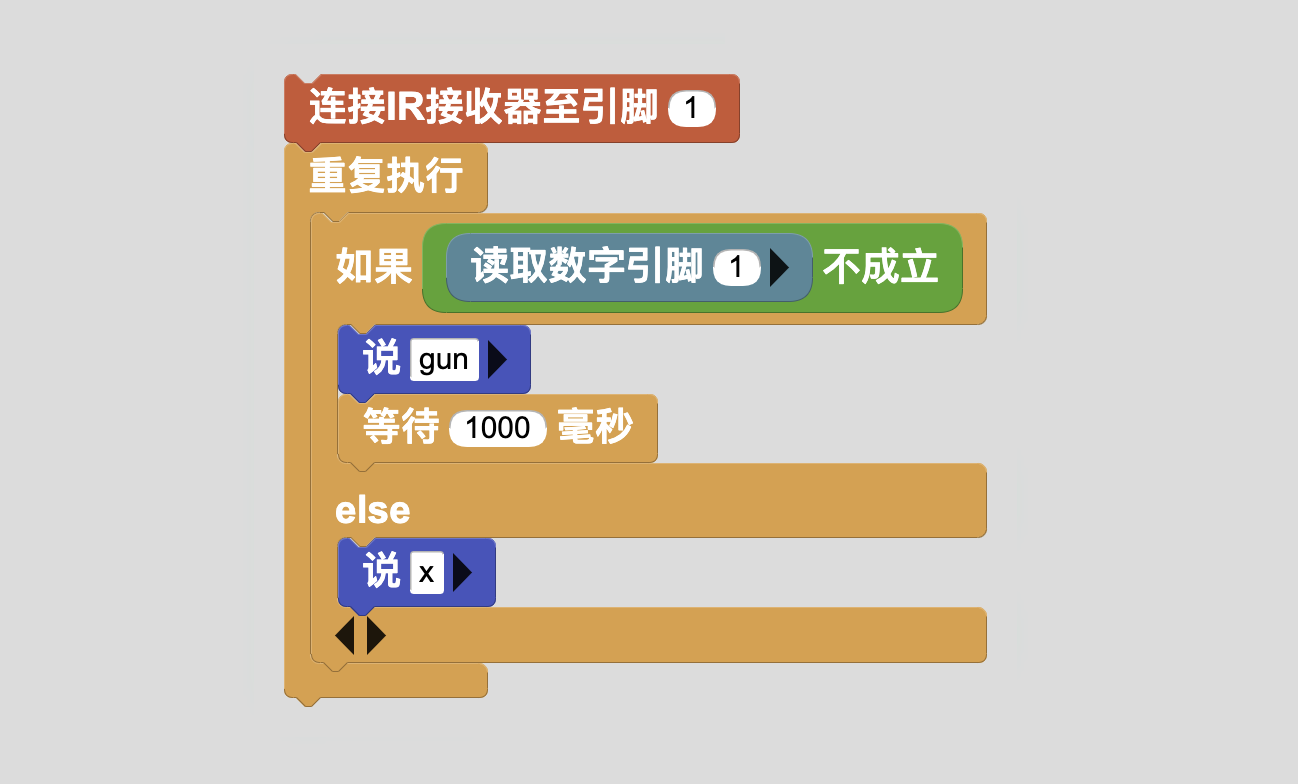 可行! 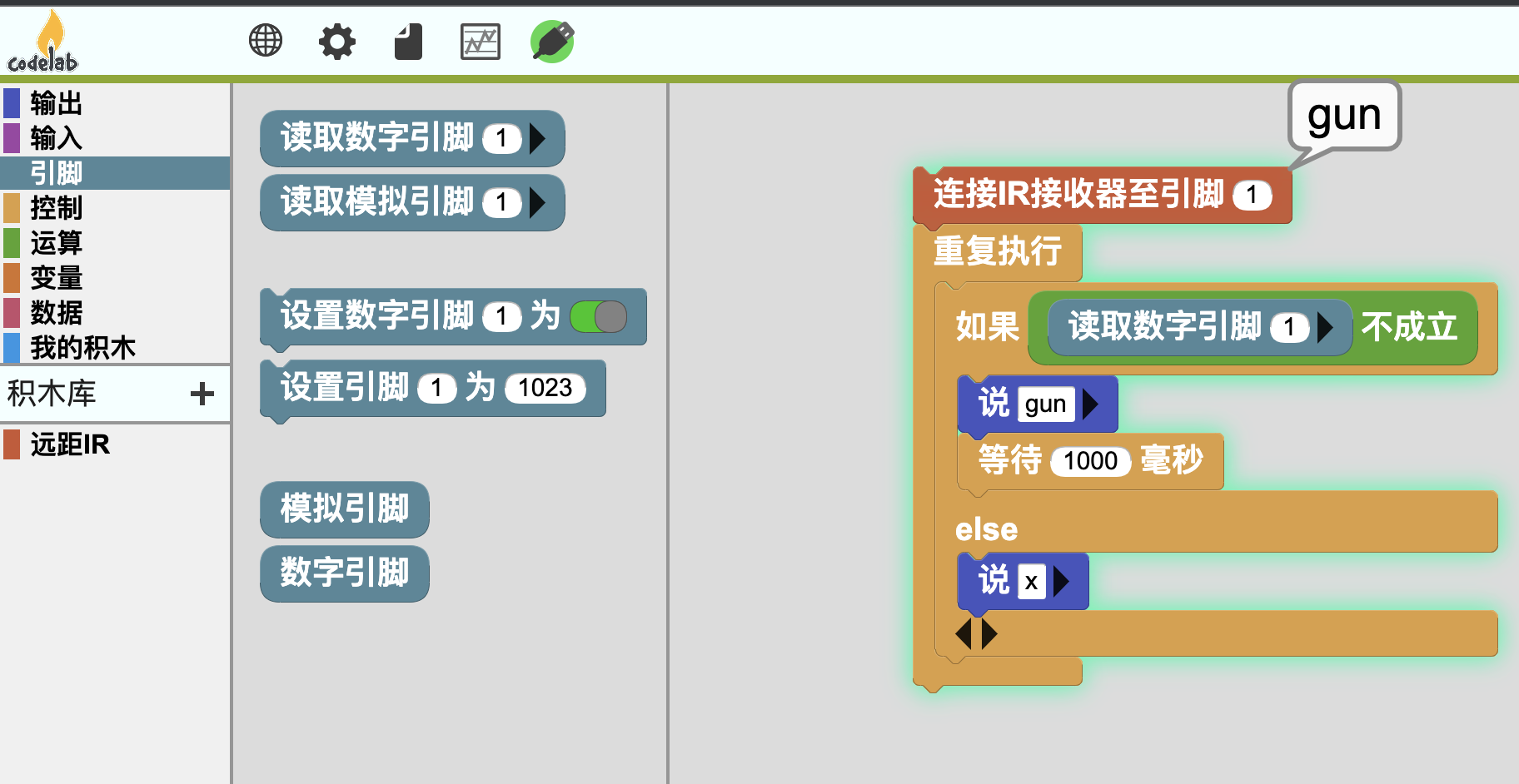 这段代码对我们就够用了,因为我们并不关心红外信号里的内容,所以不必去解码红外信号,只关心是否有被红外射中(检测 有/无红外线 射过来)。 帖子字数受限,建议阅读 原文: MicroBlocks 编程案例: 正中靶心! |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶









