|
5968| 7
|
[项目] 麦小昆视觉寻线 |
本帖最后由 rzyzzxw 于 2023-2-17 18:16 编辑  【背景】 麦小昆,一个活泼可爱的小车车。在完成了四轮方向舵小车视觉寻线的初步探索后,我想尝试一下用他和二哈来进行视觉寻线。 麦小昆有较小的转弯半径,可以用DF的纸质场地,这样就能很方便的在教学活动进行麦小昆视觉寻线展示。 经过探索,找到了一个简单的算法写程序,达到了当前环境下比较稳定流畅的视觉寻线效果。 现在汇报如下。 【测试视频】 【器材】 麦小昆 1  二哈识图 1  寻线地图 1  锂电池 1(二哈供电用) 铜柱 螺丝等 【资料】20200420153959qgxlbp.pdf (dfrobot.com.cn) 一、HUSKYLENS 巡线实现逻辑 如何让麦昆在白底黑线的巡线地图上循着黑线运动呢?其实我们只需要知道麦昆相对黑线是什么位置,分下面三种情况: 1、当麦昆在黑线的偏右位置时,控制麦昆向左转弯; 2、当麦昆与黑线相对居中时,控制麦昆直行; 3、当麦昆在黑线的偏左位置时,控制麦昆向右转弯。 具体应该怎么实现呢? 我们将 HuskyLens 在巡线过程中屏幕上显示的信息剥离出来,抽象成下图的几何数学模型。 HuskyLens屏幕的分辨率是 320×240,屏幕左上角的O点为屏幕的坐标原点(0, 0),水平向右方向为 X 轴正方向,竖直向下方向为 Y 轴正方向,因此屏幕右下角的坐标为(320, 240)。上图中橙色虚线为屏幕的中轴线,这条线的横坐标值为160。上图屏幕中黑色的线,是 HuskyLens 摄像头“看到”的巡线地图线条,蓝色箭头为 HuskyLens 计算出来的线条方向,蓝色箭头的起点坐标为(x1, y1),终点坐标为(x2, y2)。 下面的程序中我们用终点x坐标x2相对中线位置来判断小车运行方向及确定运行速度。 二、二哈使用提示
【程序设计】 mind+ 套件  传感器  参考官方资料,有思路1和2。 思路1、当 HuskyLens 检 测 到 黑 线 在 屏 幕 的 左 边 时,我们将区间 [150,170] 设置为小车的直行区间,当起点坐标值 x1 在这个区间内时,控制小车直行;当x1<150 时,控制小车左转;当 x1>170 时,控制小车右转。 思路2、按照我们先前的优化思路,既然可以将屏幕分成 3 个运动调节区间,为什么不继续分为 5 个呢?黑线位置越趋近两边,转弯速度越大;黑线位置越趋近于中轴线,转弯速度越小。或者更进一步,直接分为 7 个运动调节区间呢。 官方参考程序: 思路2完成任务效果一定比1好。 思路3、参考2的程序,我进行优化,将屏幕分为320个调节区间,用映射将箭头终点x坐标x2的取值范围0-320和两轮的速度建立联系。 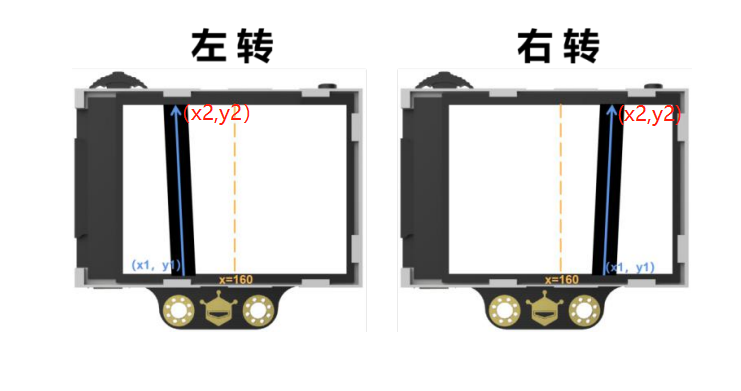 麦小昆前面的万向轮主要起支撑作用,小车运行的方向和速度都要依靠两个后轮的正转速度差来完成。
在写帖子时对程序的稳定性进行了耐久性测试,在写这行字前二哈耗尽了给它供电的电池的电后小车脱线了(换电后小车又恢复了寻线运行)。 我对继续测试的稳定运行充满信心。 程序如下: 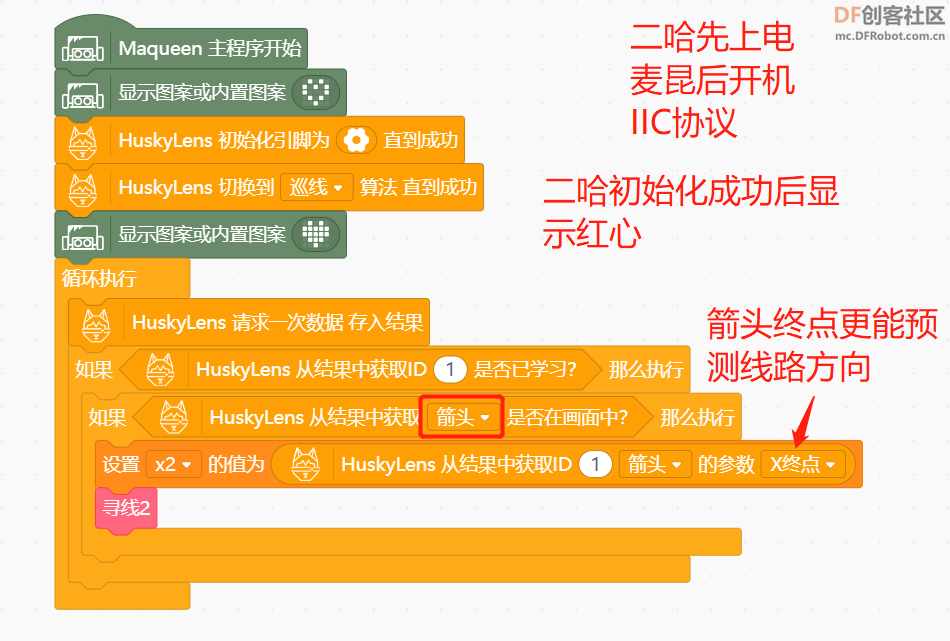 以80为直行速度,+-80得到速度范围0-160。 记录这个函数是因为它让我取得了第一次稳定流畅寻线测试成功。  为了得到更大的直行和转弯速度,将速度范围0-255充分应用后,得到寻线2函数,这时直行速度约127。  映射的应用是程序算法的重点,感谢官方文档的启发。 完整程序: 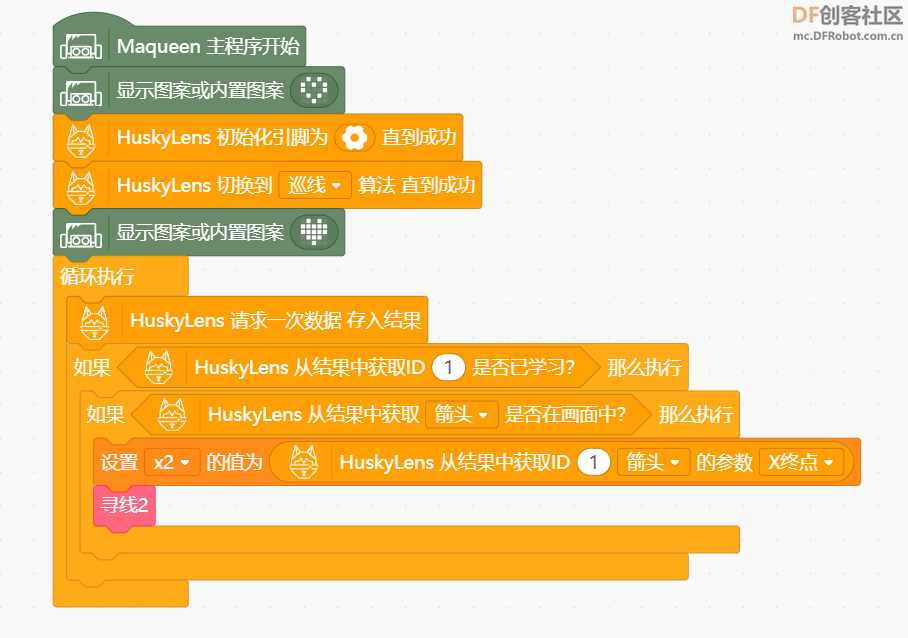 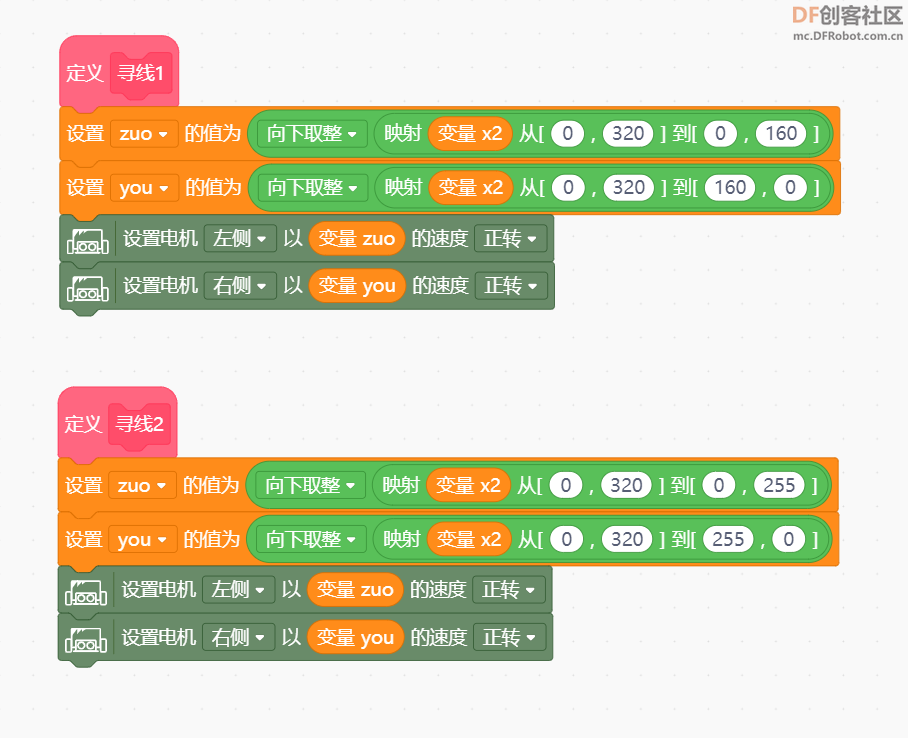 【小结】 1、二哈识图寻线的功能很有趣,值得大家继续探索。 2、麦小昆电池容量小,二哈识图要通过usb单独供电,IIC的通信线要接到麦昆IIC口。 3、麦大昆电池容量大(漂流给别的老师了),等漂回来后再做测试。 4、实线比虚线寻线稳定(不脱线),麦小昆视觉寻虚线不打算做了。 5、可以用黑色易擦白板笔在浅色地板上画细线条寻线,效果也很好。 【附件】  麦昆二哈寻线.zip 麦昆二哈寻线.zip【提示】后续学习与探索发在回复中,请伙伴们不要留言。感谢。 |
rzyzzxw 发表于 2023-2-9 21:29 HuskyLens摄像头系列 | 写给小学生看的视觉PID巡线算法 https://mc.dfrobot.com.cn/thread-300508-1-1.html?fromuid=727937 (出处: DF创客社区 - 分享创造的喜悦) |
|
1月13日学习笔记 晚上,再次学习铁熊老师的文章:HuskyLens摄像头系列 | 写给小学生看的视觉PID巡线算法 https://mc.dfrobot.com.cn/thread-300508-1-1.html?fromuid=727937。  根据公式,可以看到 PID 分为 3 个部分:比例调节(P)、积分调节(I)、微分调节(D)。 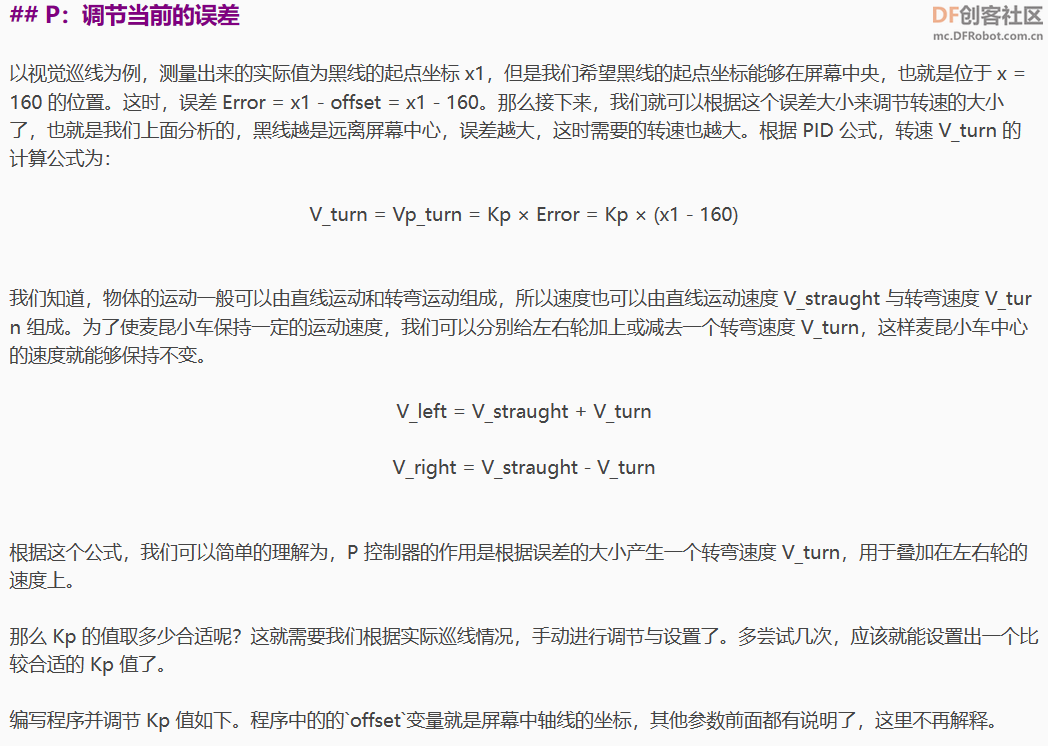 按照陈老师的程序,照抄如下,帖子刚发的时候就读过几遍了,虽然上过小学,可是硬是没读懂,记得当时照样子抄了程序,也不没有成功寻线,放弃了探索。 这一次又读,并且一句句写程序一句句理解,竟然对上面P寻线部分读懂了。 并且发现,我上面帖子中映射的算法,和P寻线是异曲同工的,难怪能够稳定的寻线。 有一点不同,我在程序中仍然用了我的思路,用终点的x坐标x2来求Error。感觉效果挺好的。 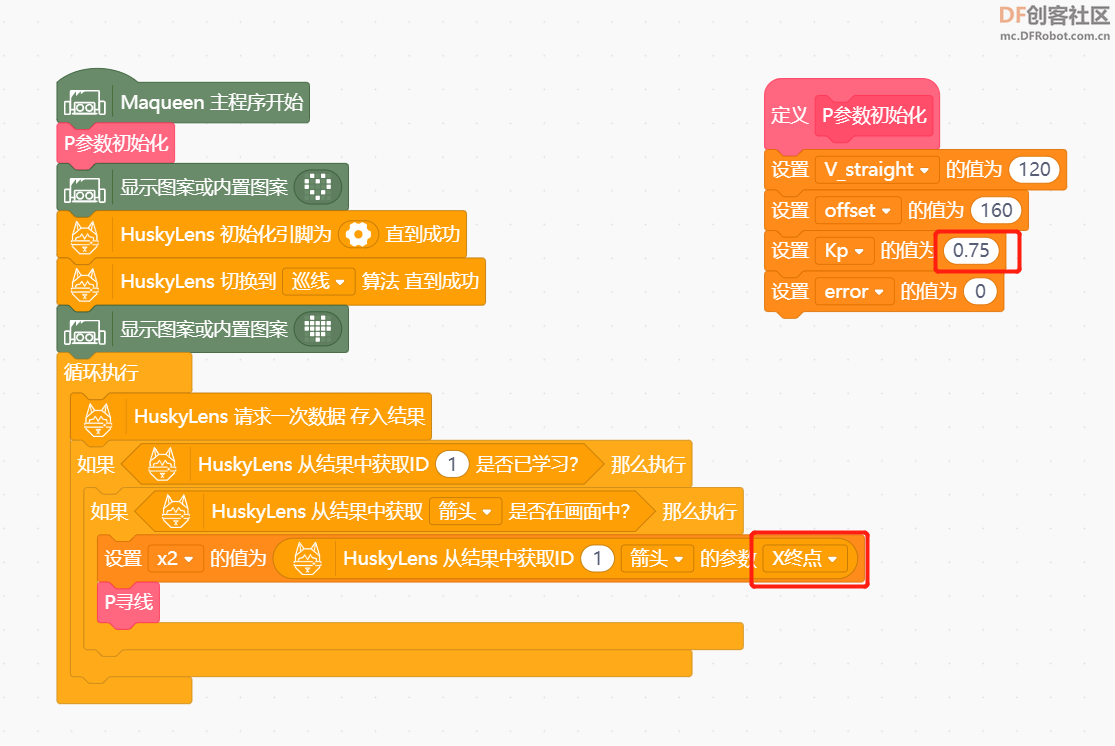 第一次的尝试,直线速度取了120。 当我理解了程序后,Kp直接用120/160=0.75。  |
 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶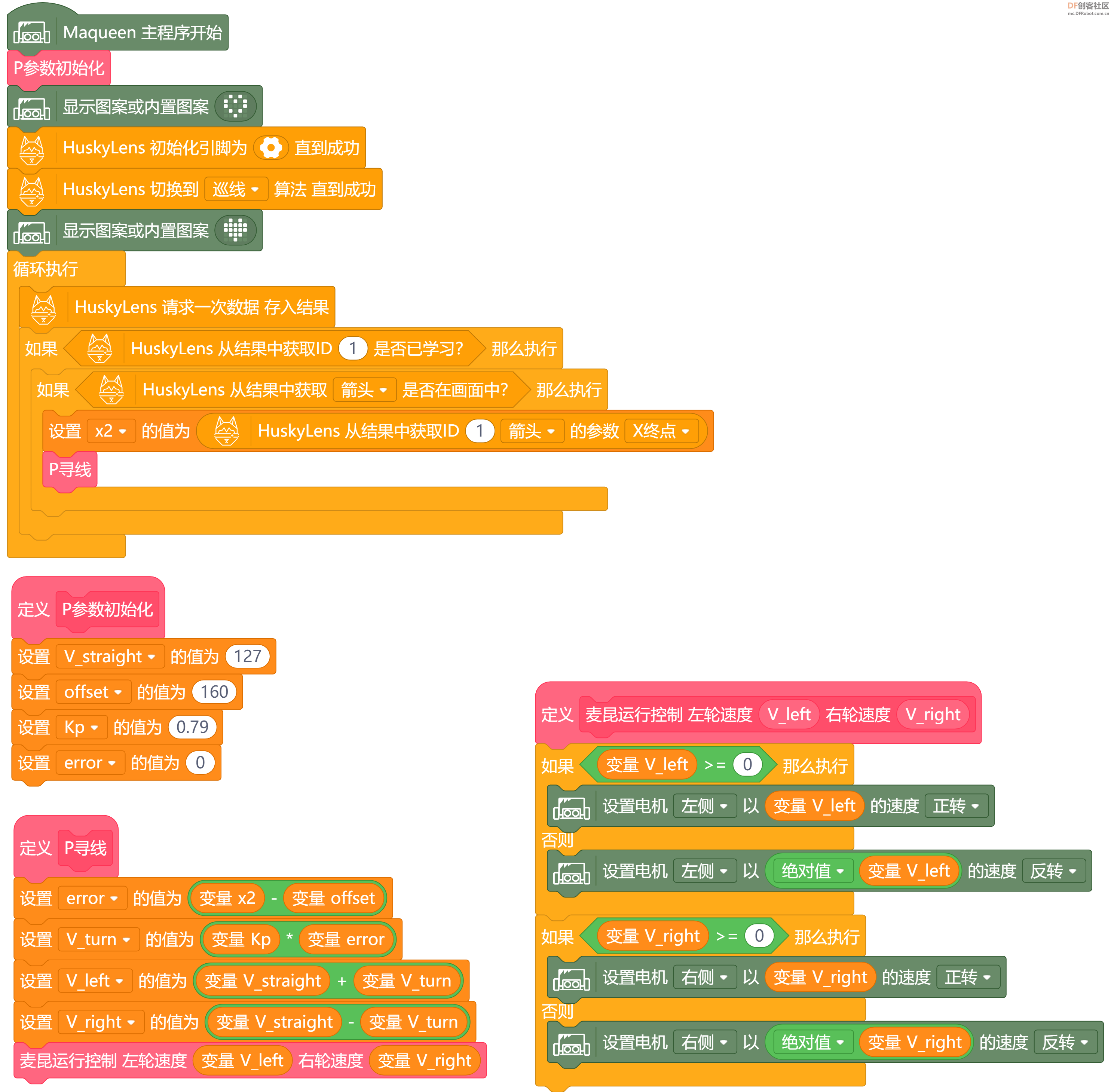

 活跃会员
活跃会员
 宣传大使
宣传大使
 版主限定
版主限定
 牛X认证
牛X认证
 老版主限定
老版主限定
 创作达人
创作达人
 小蘑菇
小蘑菇
 蘑菇人
蘑菇人
 蘑菇老人
蘑菇老人
 荣誉教师
荣誉教师
 编辑选择奖
编辑选择奖
 物联网挑战
物联网挑战
 编辑选择奖
编辑选择奖
 ARD DAY
ARD DAY
 编辑选择奖
编辑选择奖
 创客造
创客造
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖









