|
51254| 2
|
[项目] 我造了一台“指哪抓哪”的神奇机械臂“Explorer Arm”! |
|
本帖最后由 小津子 于 2023-8-28 14:48 编辑 历时近一个月,我又完成了一个新项目—— 一台神奇的机械臂“Explorer Arm”。先奉上视频: 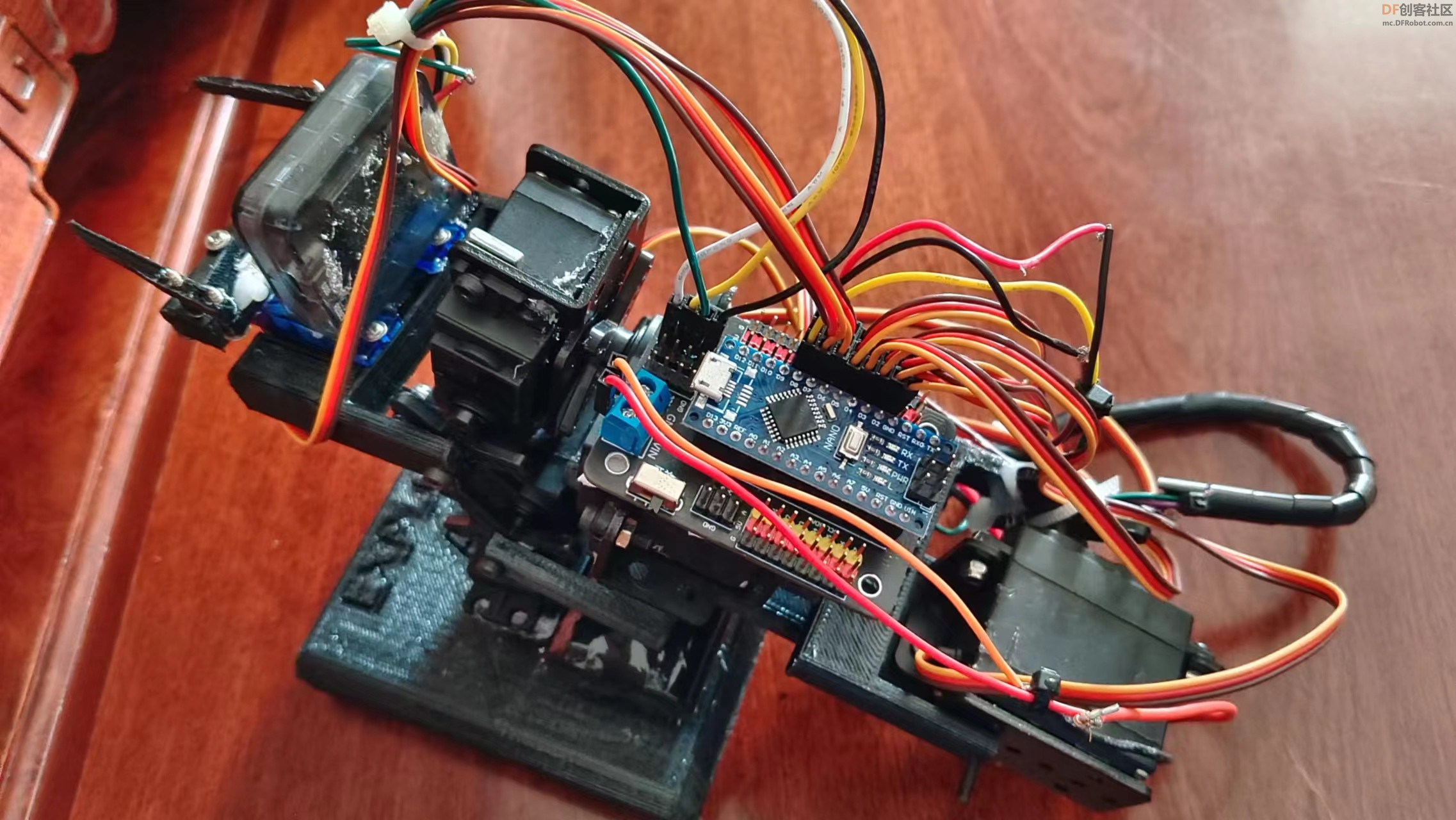 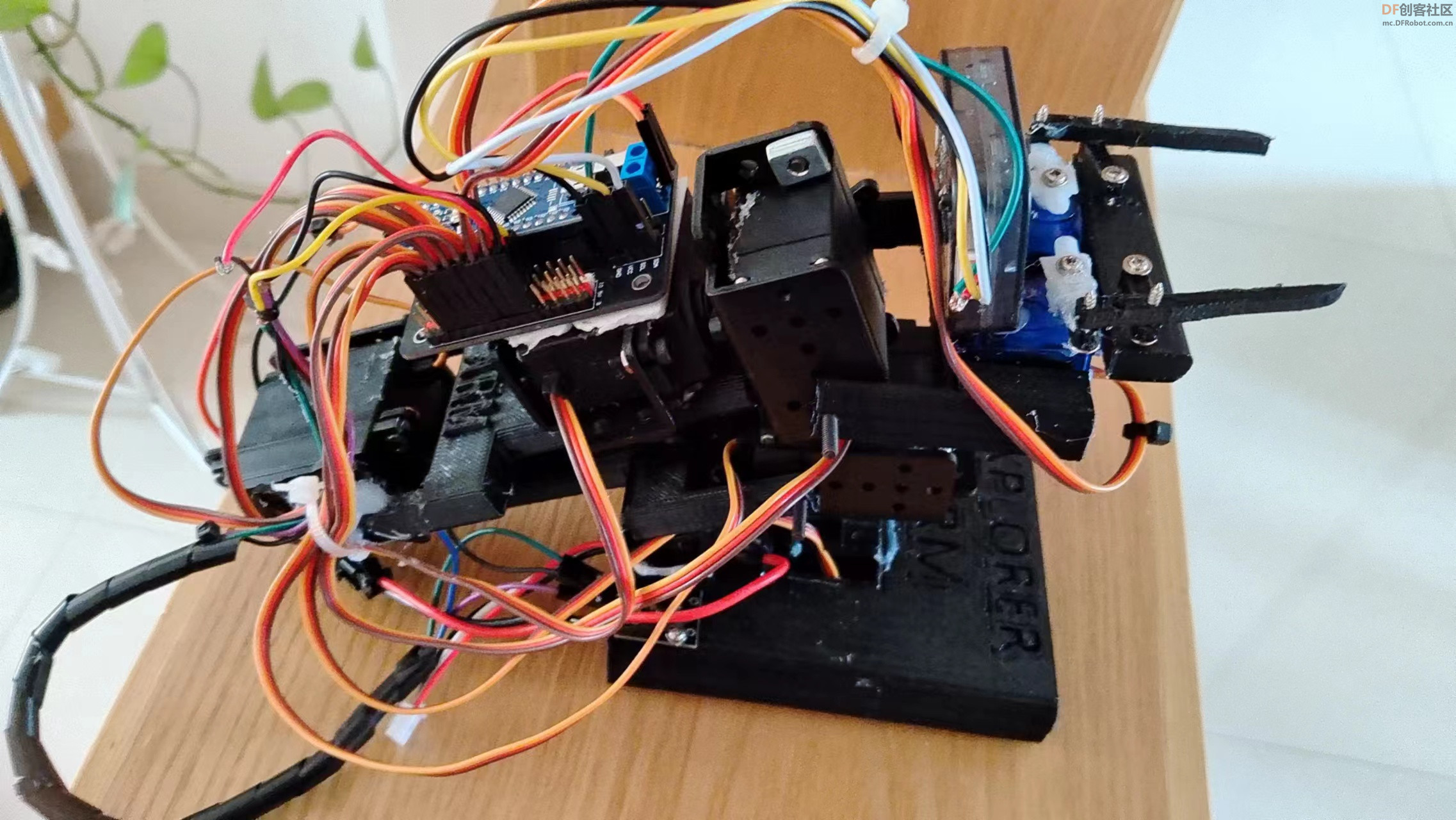 自从自制了机械臂“Good Arm”之后,我对机械臂的兴趣度提高了不少。于是,我打算再造一台功能更加完善的机械臂。于是,在肝了几周后,一台全新的作品:机械臂“Explorer Arm”诞生了! 在设计之前,我总是喜欢个自己立一个目标,这次也不例外。作为一台机械臂,最重要的,当然是可操作性和实用性。因此,我认为这台作品应该更加小巧,可以实现夹持器的切换;并且能够运行实用的程序,最好加上视觉识别功能,让它能够进行视觉跟踪,并抓取用户指定的物体,达到“指哪抓哪”的效果。(令我兴奋的是,最后,这一功能居然实现了!) 话不多说,我先为大家介绍它的机械部分吧!这台机器人的机械部分,依旧使用3D打印技术进行辅助制造。以下是3D设计图样: 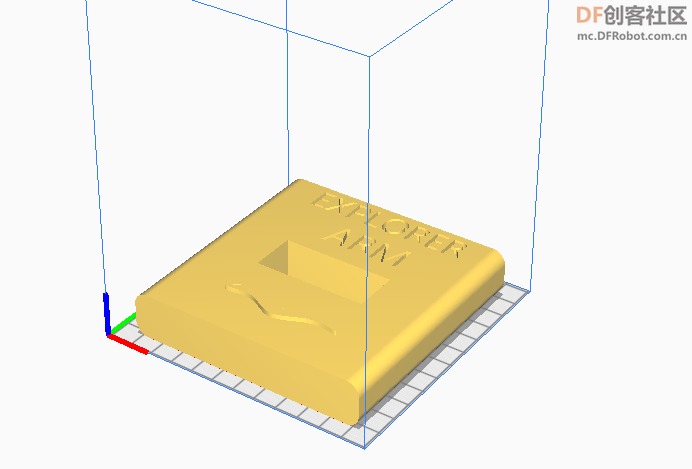 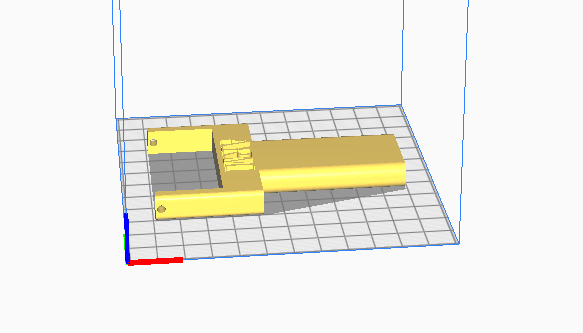 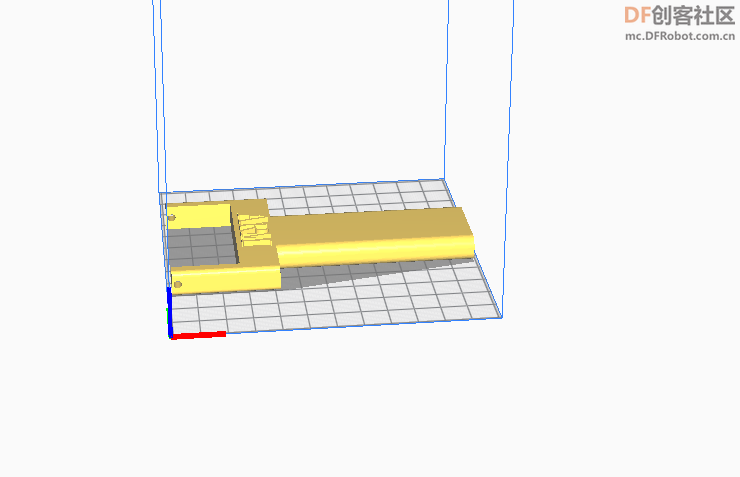 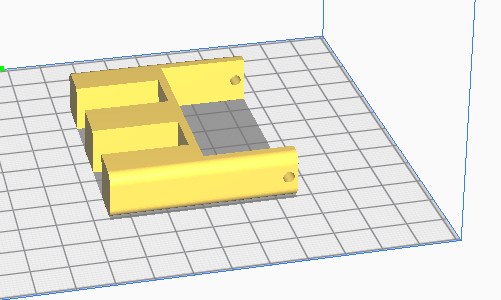 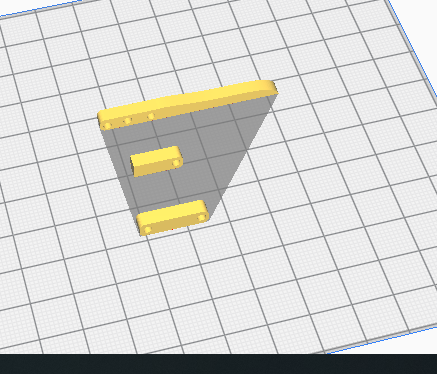 打印好的结构件:    其中,每段机械臂都由MG995舵机以双轴输出控制,保证其稳定性。 接下来开始组装。首先安装底座上的舵机:  安装组成XY关节的第二个舵机,并装上第一段机械臂: 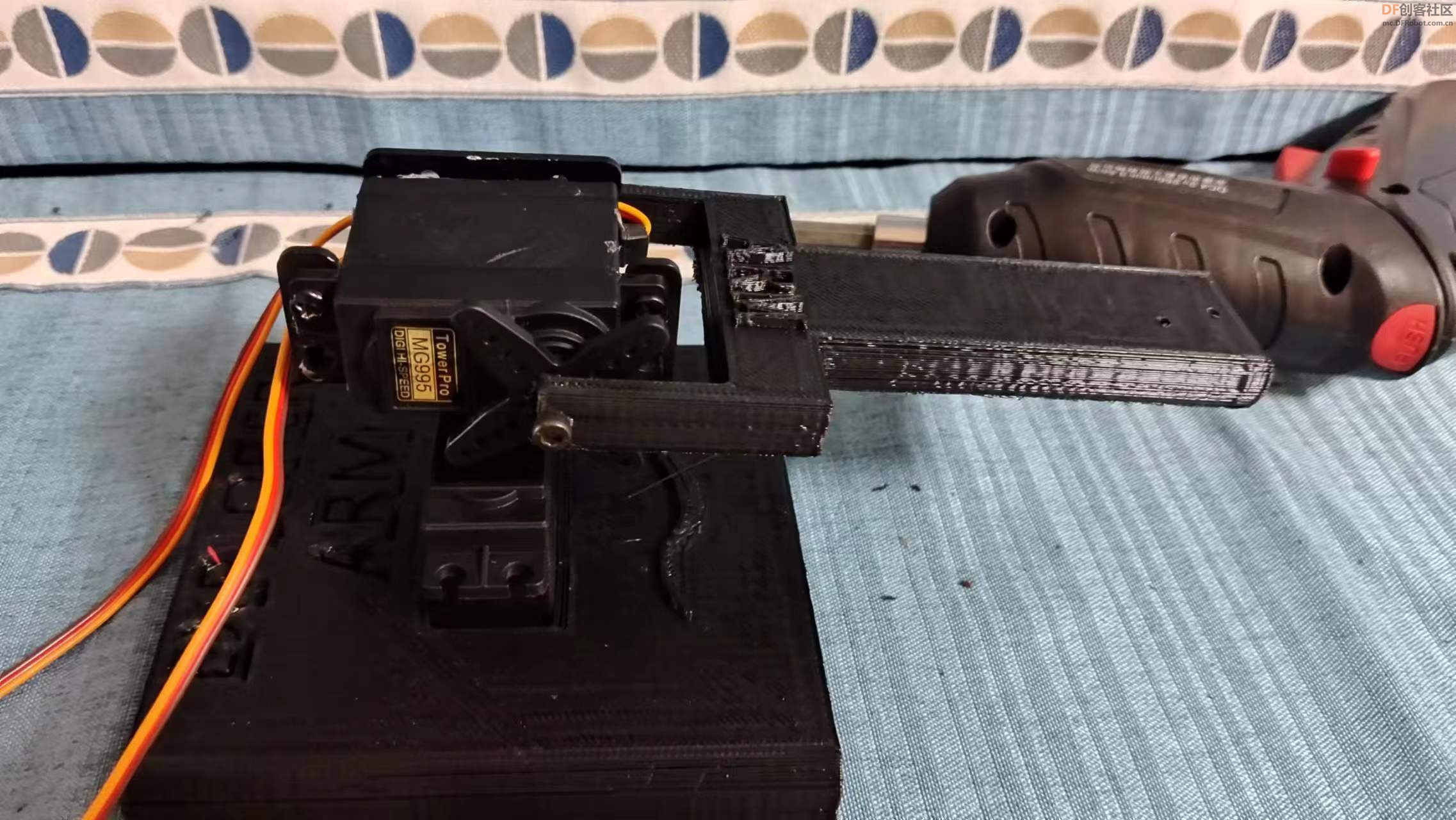 在其末端固定上一个舵机支架: 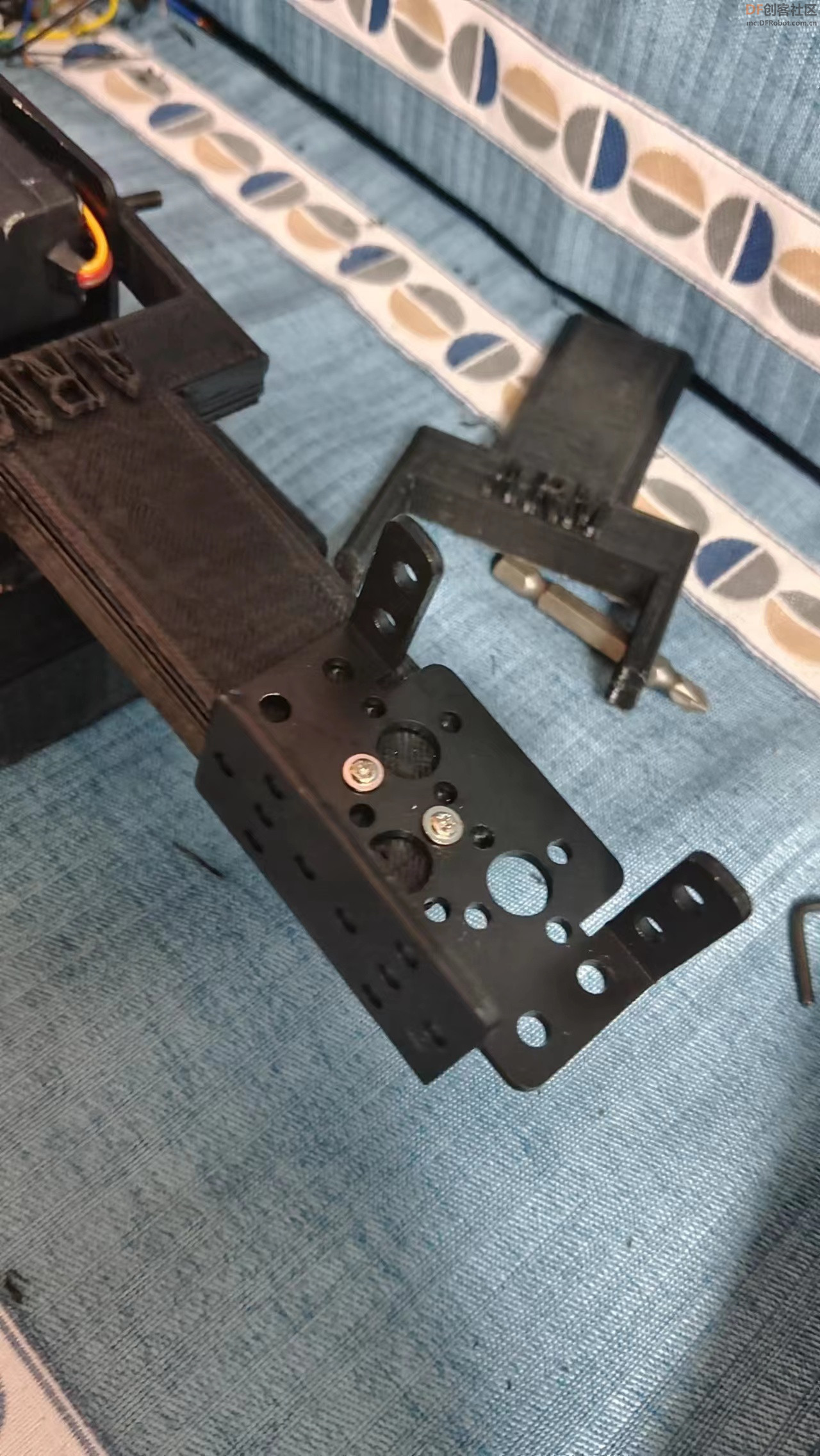 装配第二段机械臂: 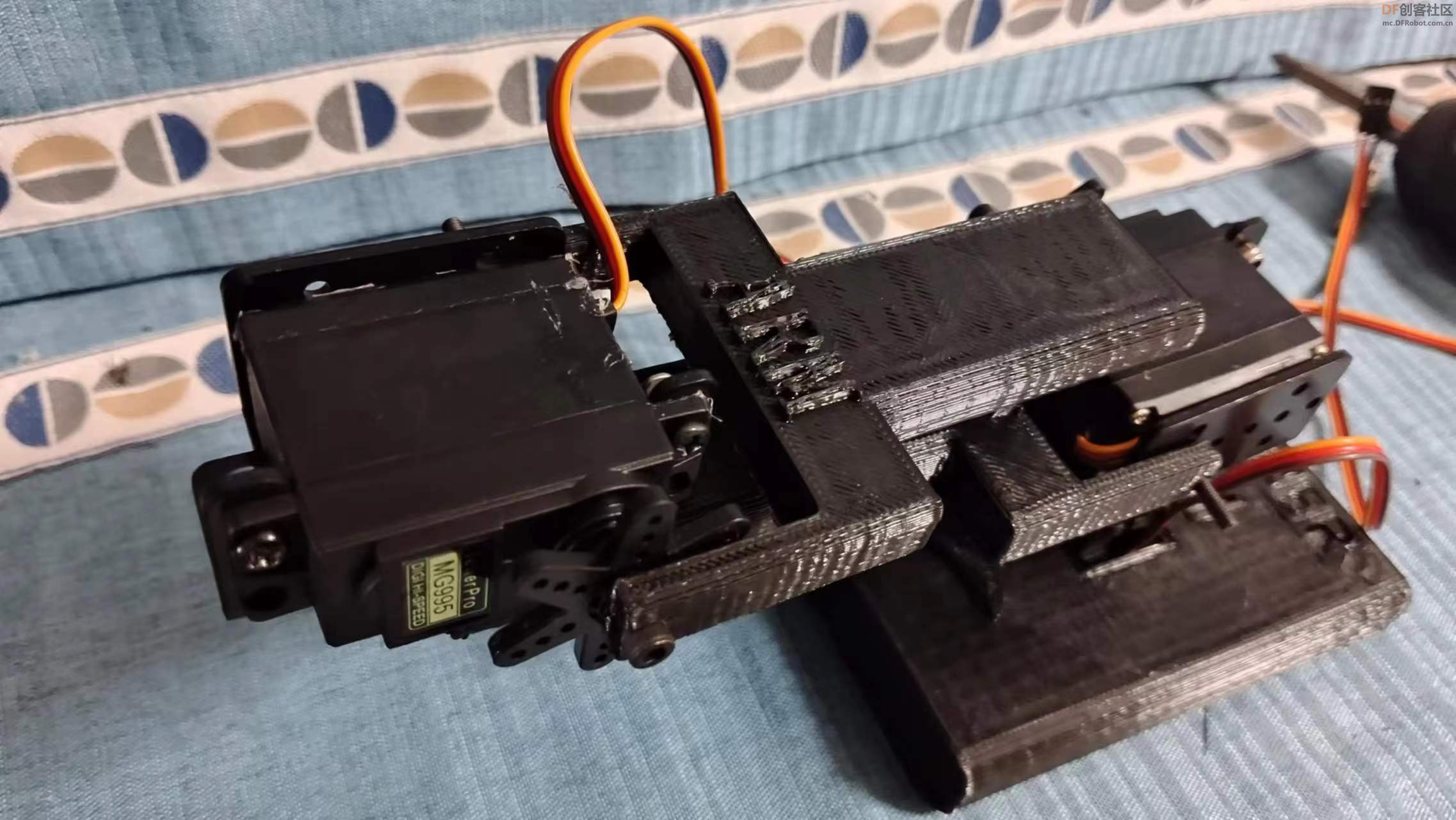 在第二段机械臂末端再安装一个舵机支架,为装配末端执行器做准备: 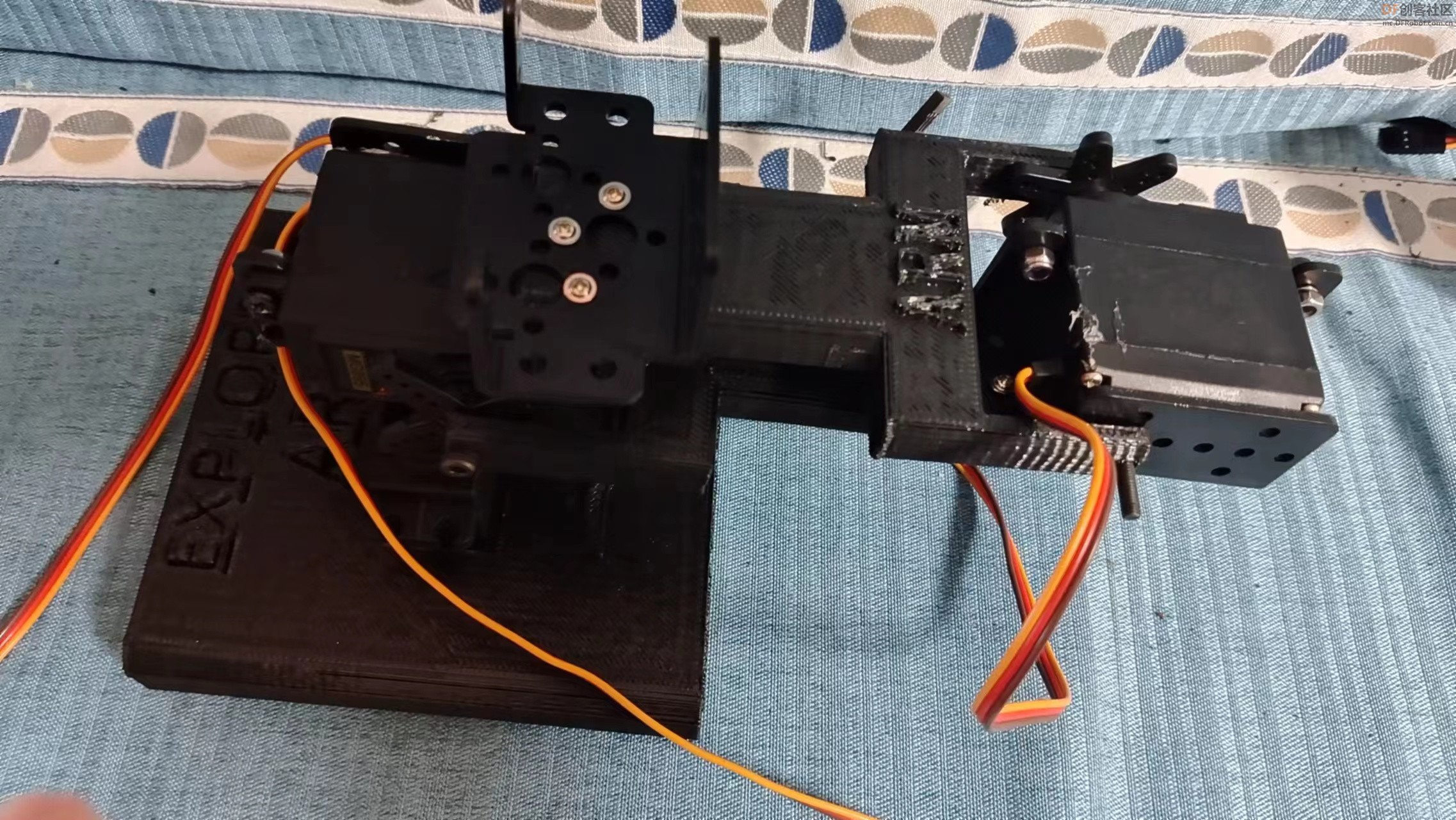 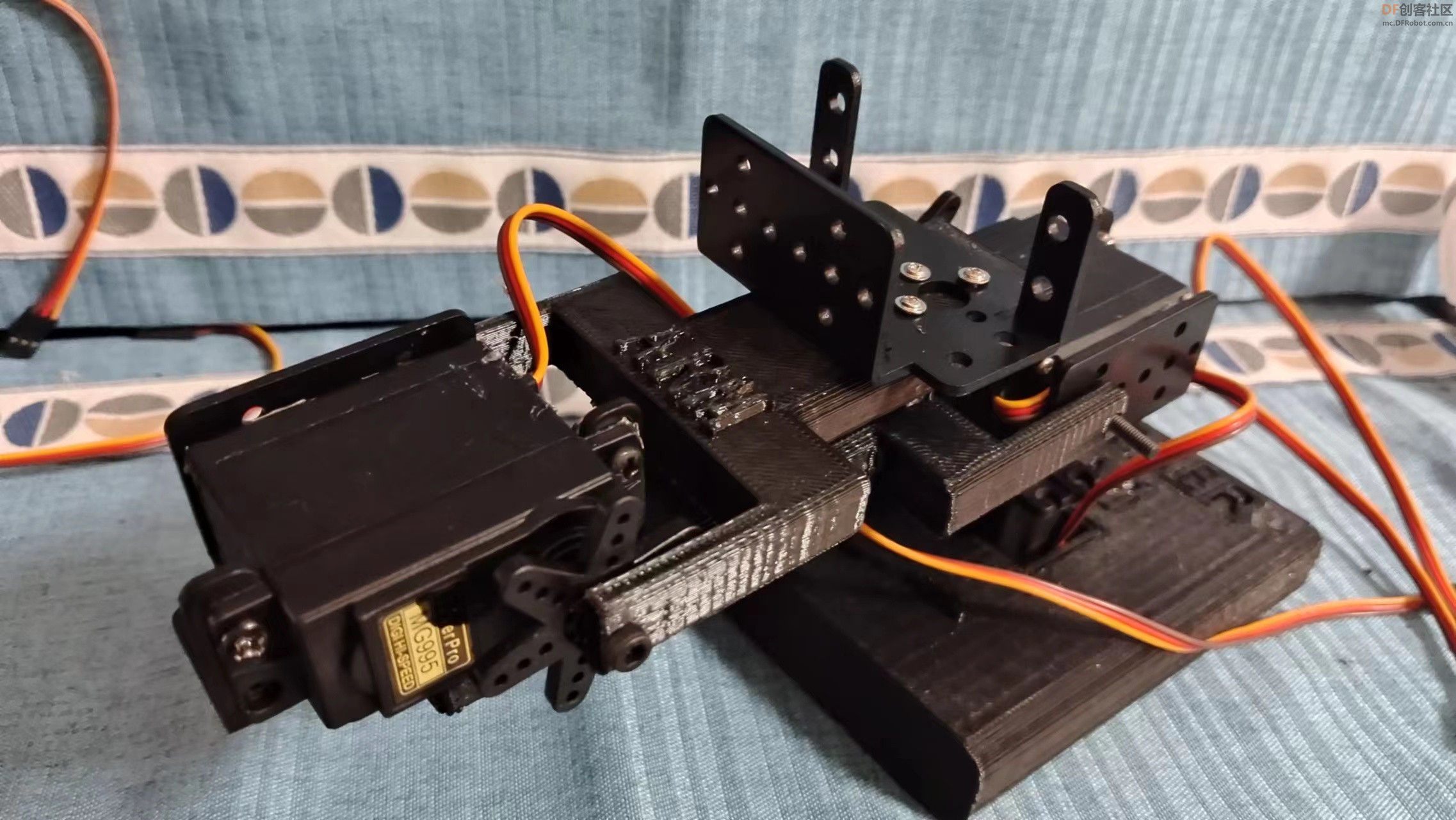 然后,就是至关重要的末端执行器(EOAT)了。在我制作的两台机械臂中,机械夹爪都是最令我煞费苦心的部分。在“Good Arm”中,我采用双层设计,上层是平行夹持器,下层则是角度夹持器。这样做虽然可行,但太占空间。考虑到这台机械臂还需要安装视觉传感器,因此,双层设计明显不是好办法。那还有什么解决办法呢?我想出一个好点子:通过改变末端执行器的机构来实现夹爪的切换。说干就干,我马上做出了成品: 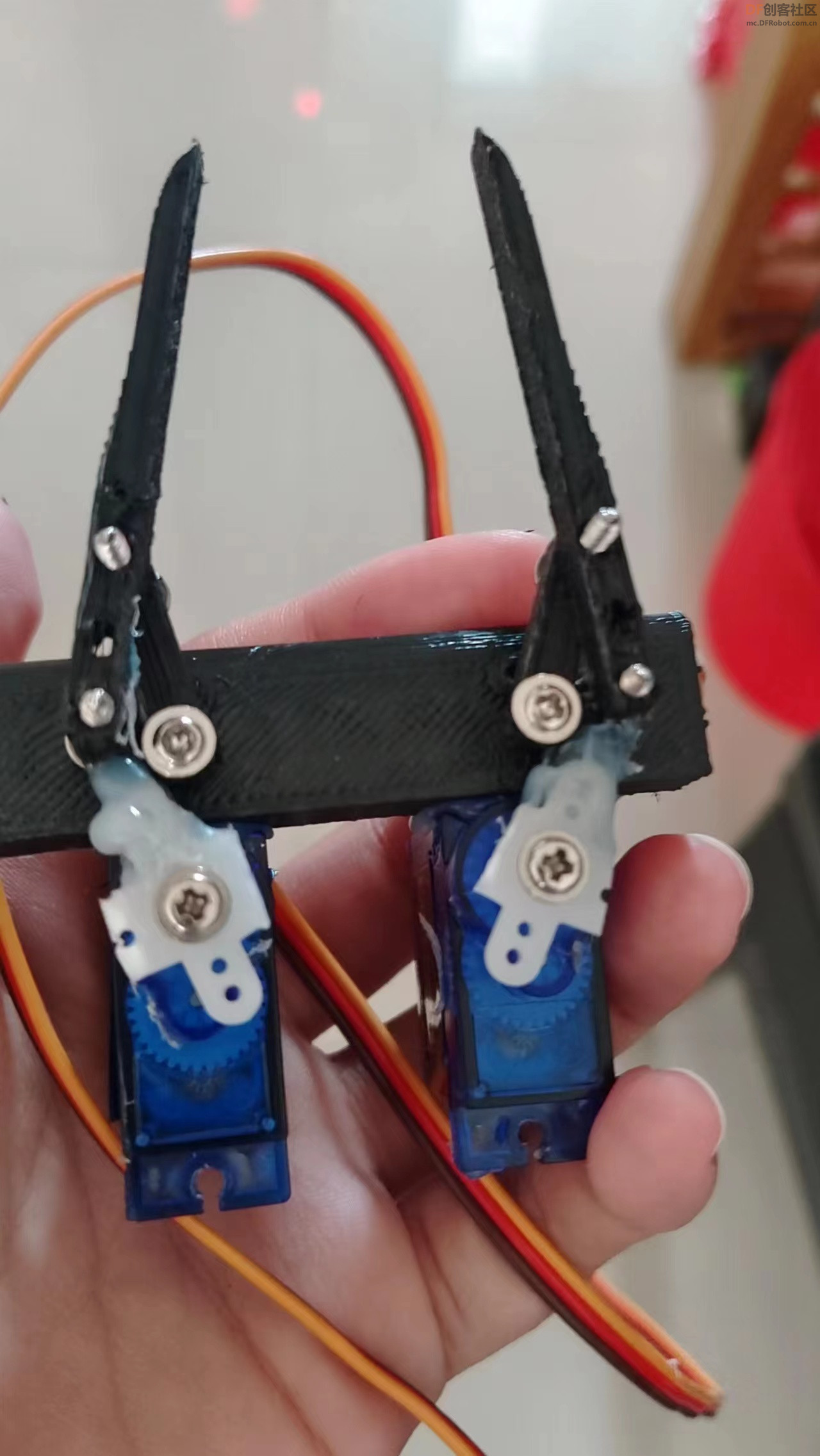 安装到支架上的效果: 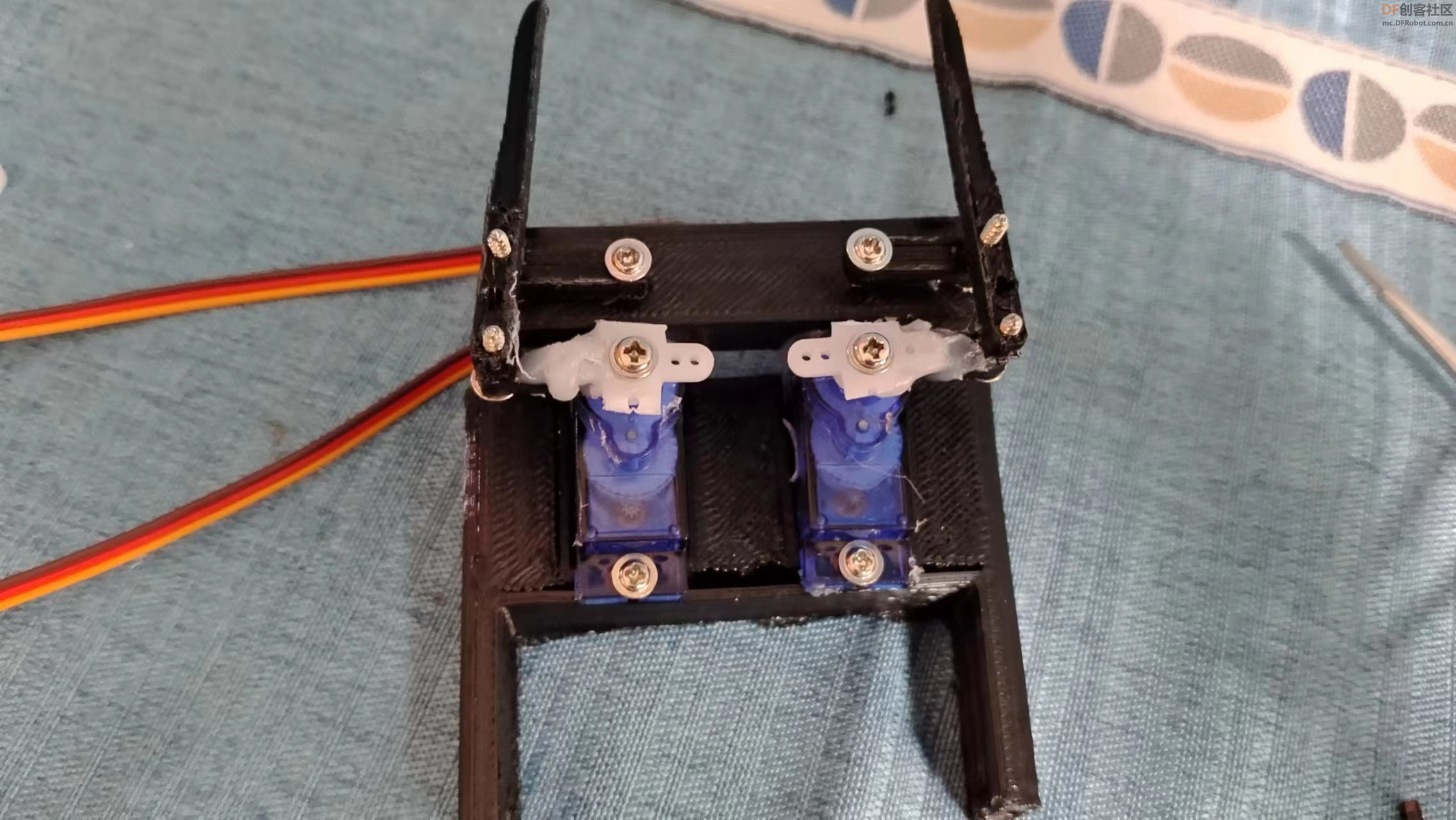 它利用了四杆机构的特性。在平行夹持器形态(即上图)中,舵机通过驱动一组平行双曲柄机构,进而控制夹爪平行靠拢夹紧物体。如果用户需要切换到角度夹持器形态,只需要将两个从动曲柄末端的位置进行更换即可。这个设计,通过改变机构中机架的长度,从而实现平行夹持器与角度夹持器之间的切换。怎么样,是不是很巧妙? 角度夹持器形态: 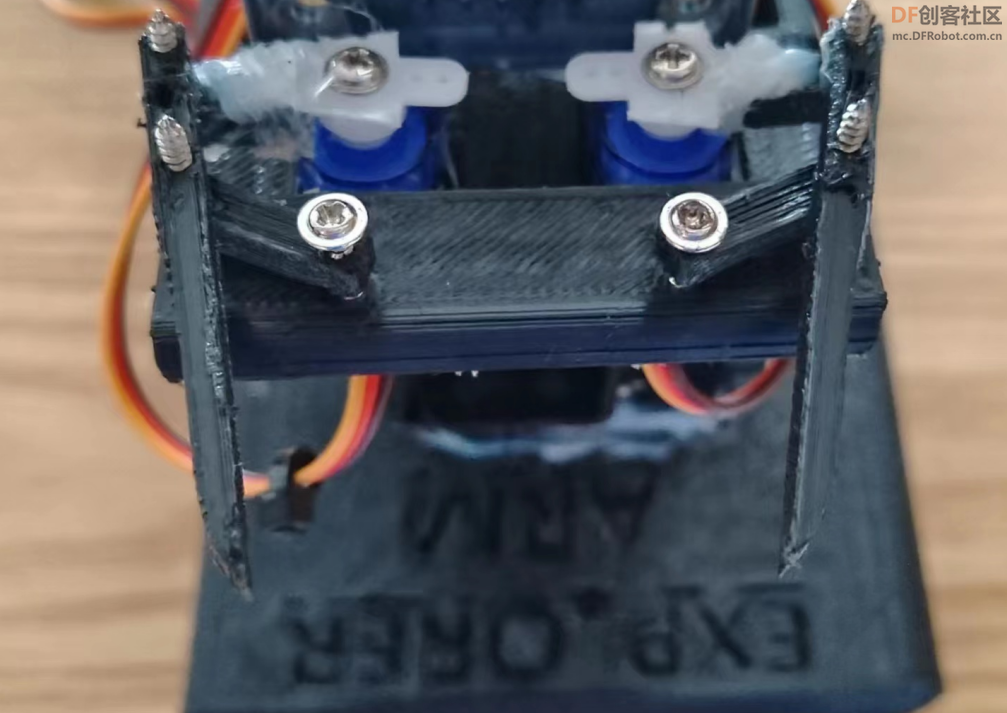 把末端执行器装到机械臂上的效果: 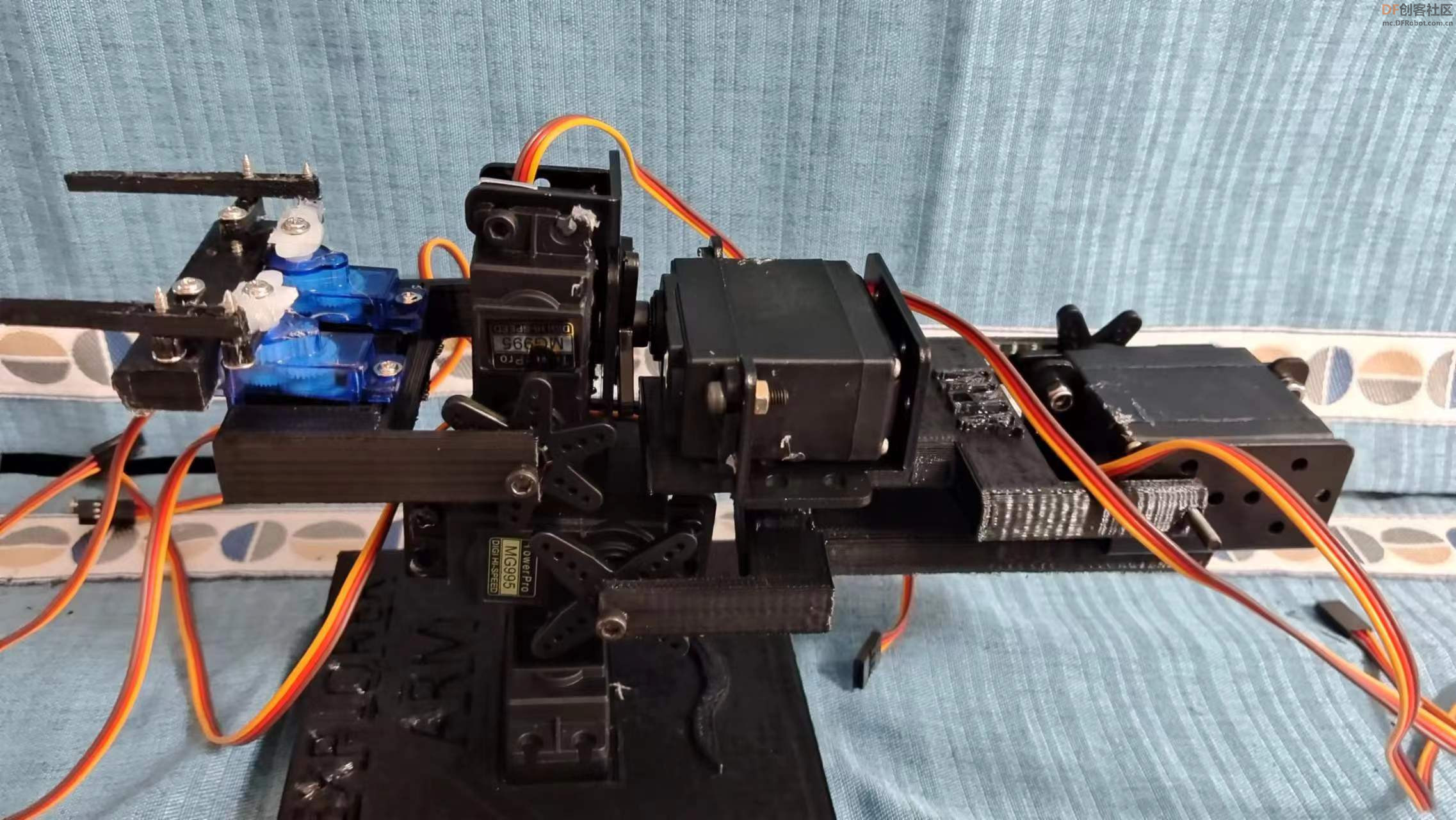 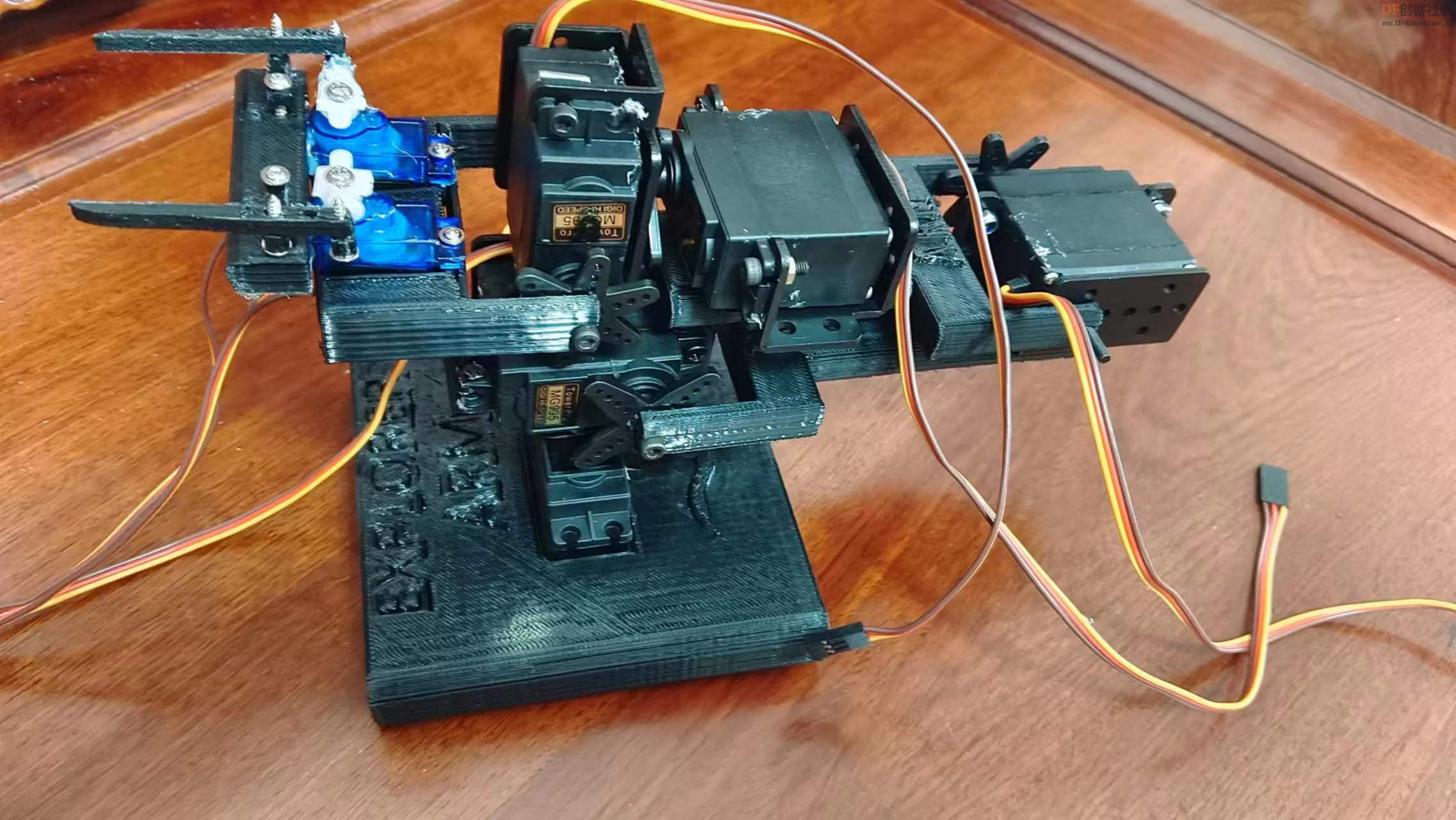 这样,我们的机械部分就大功告成了!接下来,就是“Explorer Arm”的电子电路部分。上一台机械臂“Good Arm”采用Arduino uno加上众灵科技二十四路舵机驱动板的“强势组合”,但这个组合有一个致命缺陷,那就是所占空间太大,没有太多位置再来安放其他传感器,成本又高,对更加小巧,且需要实现更多功能的“Explorer Arm”来说,这明显不是一个好的选择。于是,我选择使用更加小巧的arduino nano。 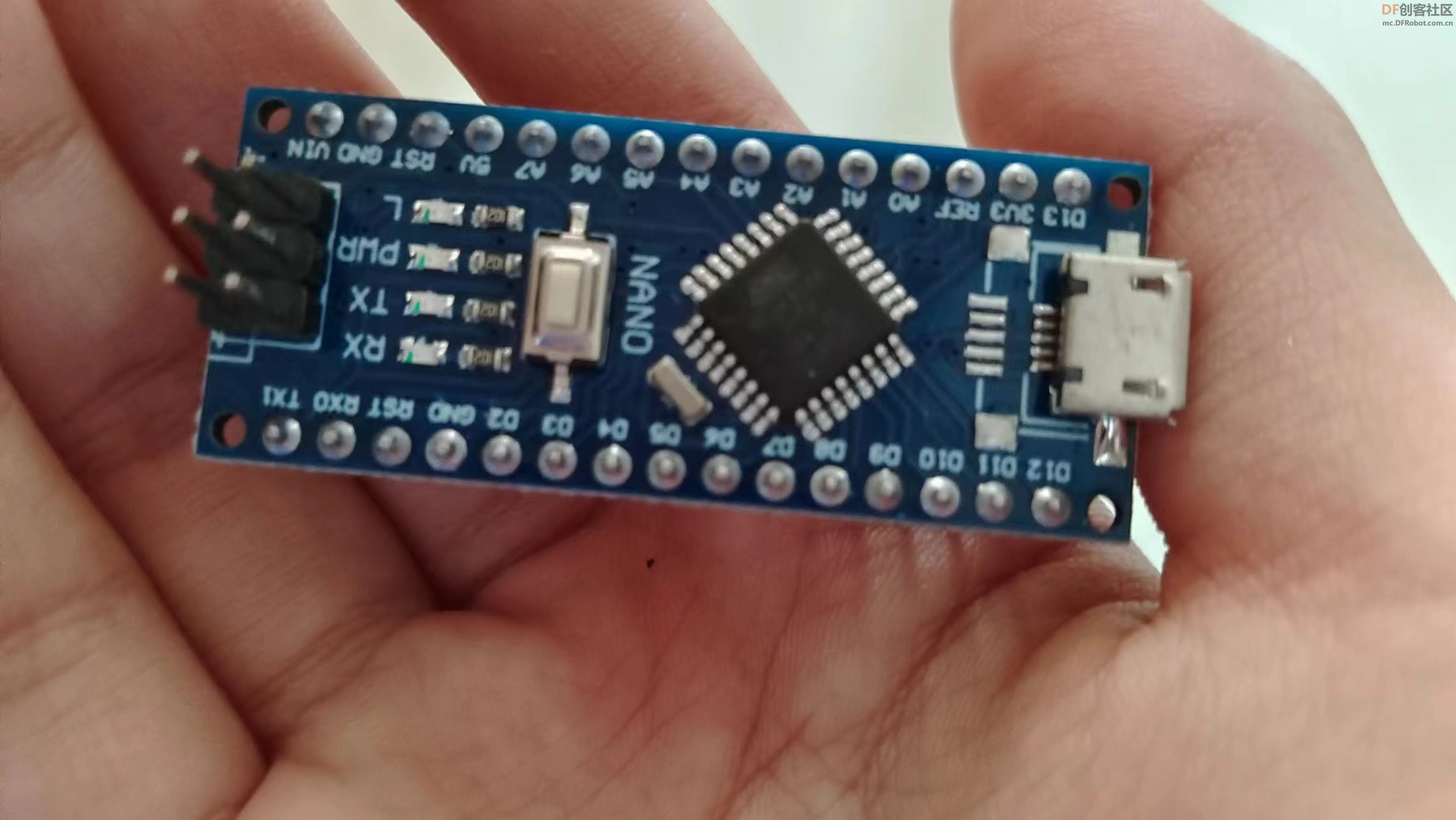 这款小巧的板子,显然更适合这个新项目。把它插在扩展板上,就可以方便地进行接线了!如图: 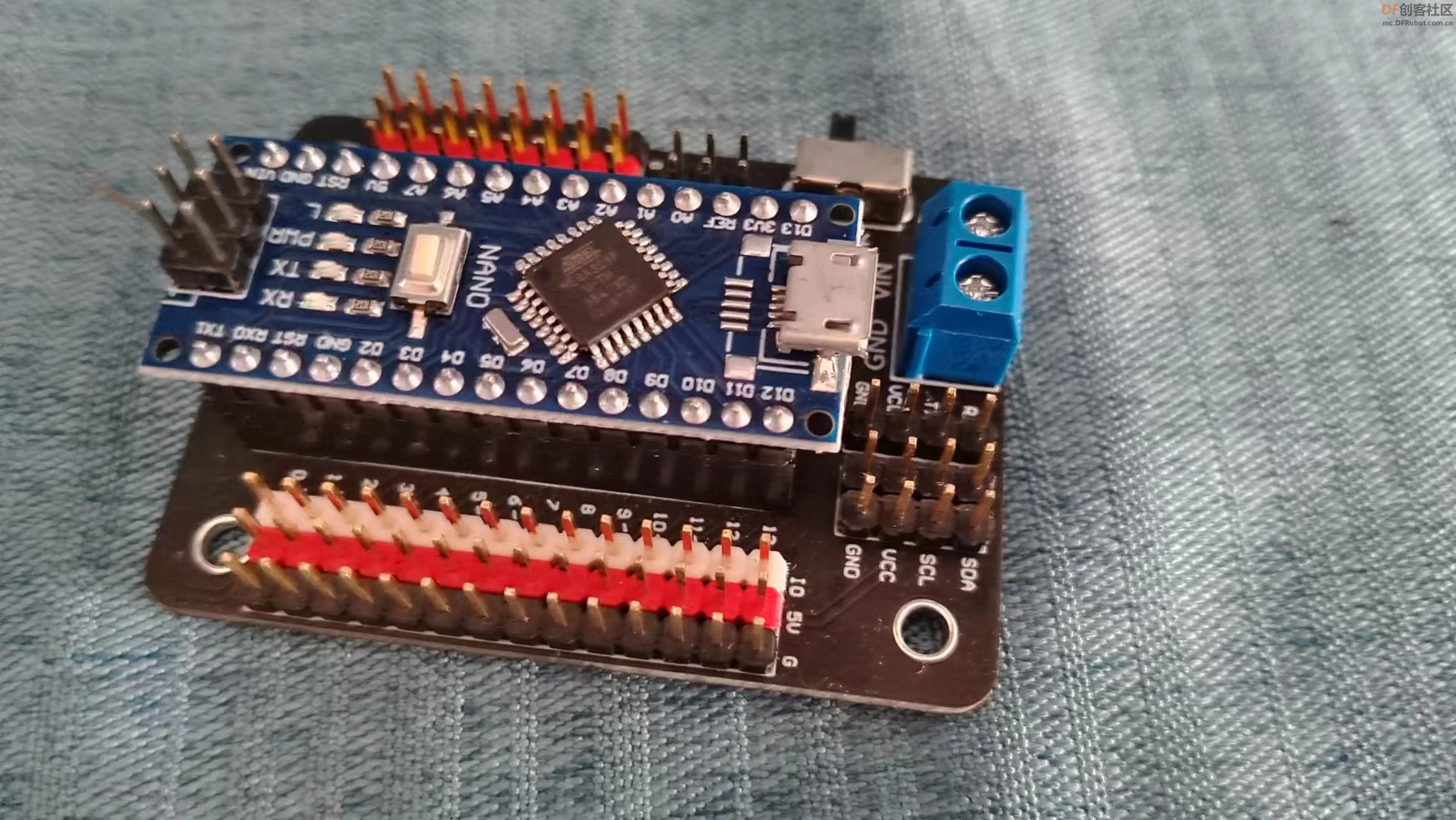 在这台机械臂中,我打算采用众灵科技的电池进行供电,电压更大,动力更强劲,还可以进行充电。用arduino nano的数字引脚2至8来进行舵机的驱动,数字9号引脚连接一个安装在底座上的轻触开关,以感应是否有人按下按键。除此之外,我还使用了一组12C引脚连接视觉传感器。 “Explorer Arm”所使用的视觉传感器是sentry1视觉传感器(如下图)。它的价格只有100多块,但是性能还不错,支持12C和串口等通讯方式,支持颜色识别、色块识别、球体识别等多种算法,支持包括arduino在内的很多开发板。在这台机器人当中,我利用了它的色块检测算法,识别红色小方块并传回数据,让arduino nano控制机械臂进行跟踪,在小方块的诱导下一步步实现对目标物的抓取。  接好线的机器人的样子(记得要把线整理一下哦  ): ):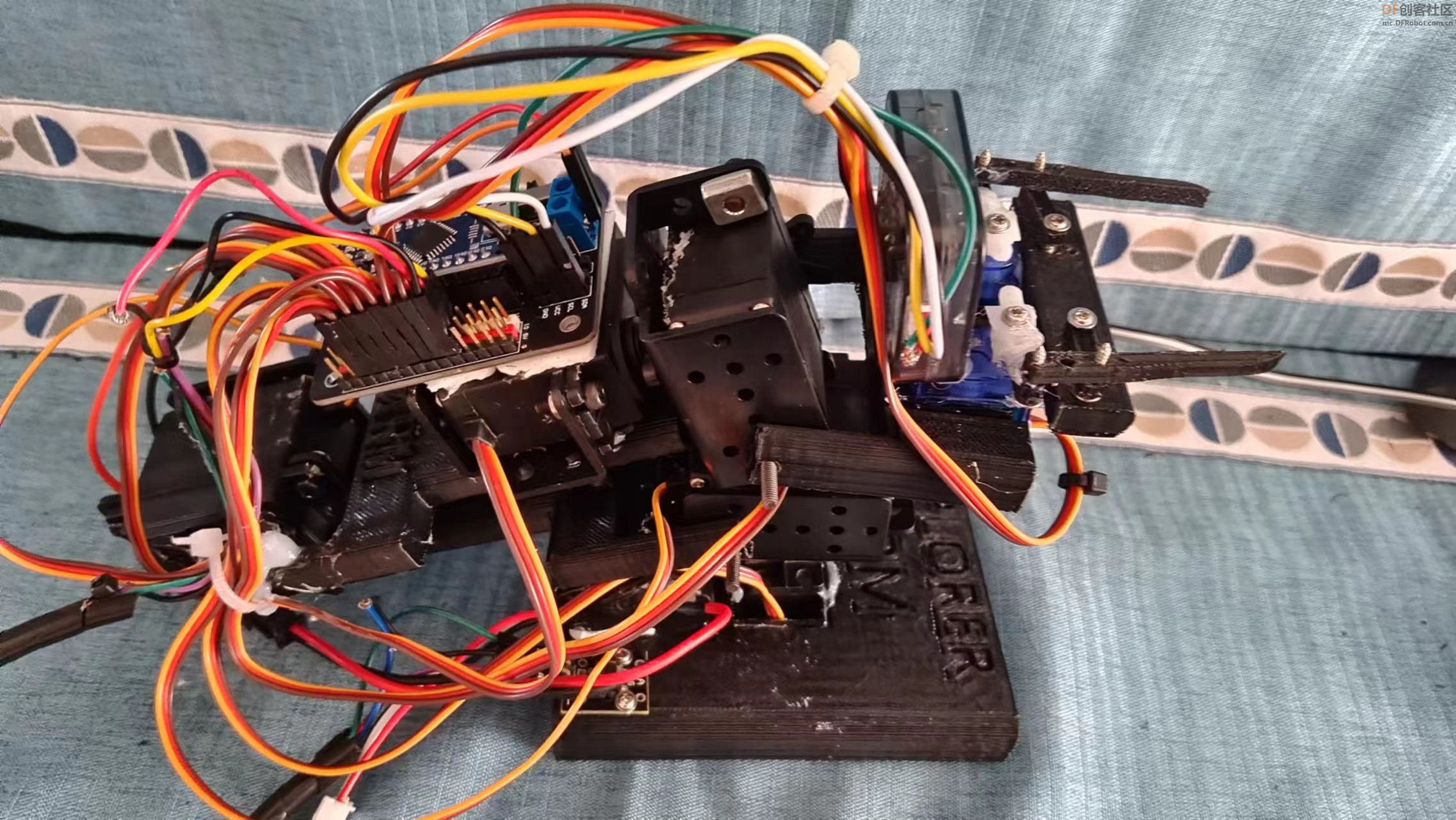 最后,就要为机器人“注入灵魂”了。这回,我用arduino IDE进行编程。 部分程序截图: 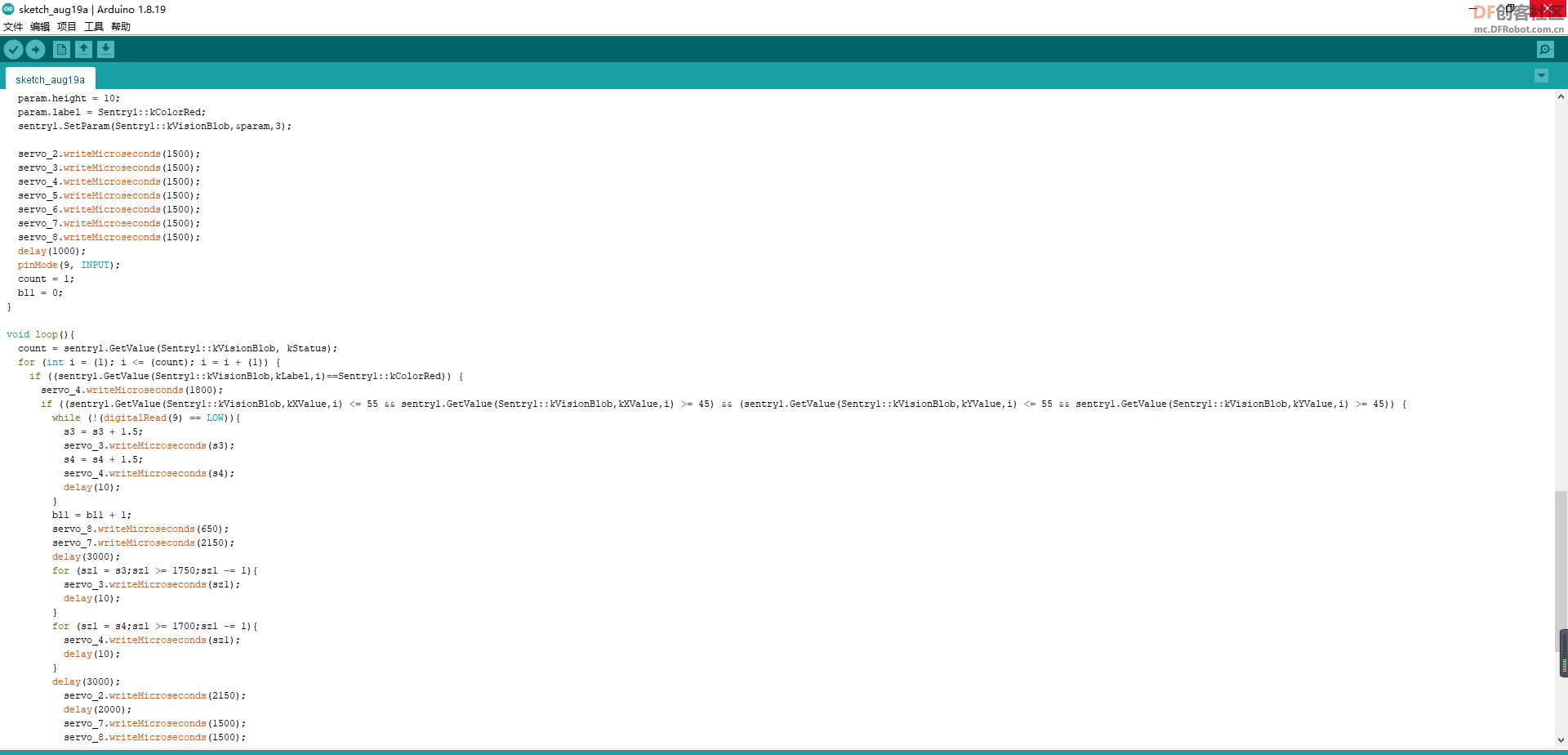 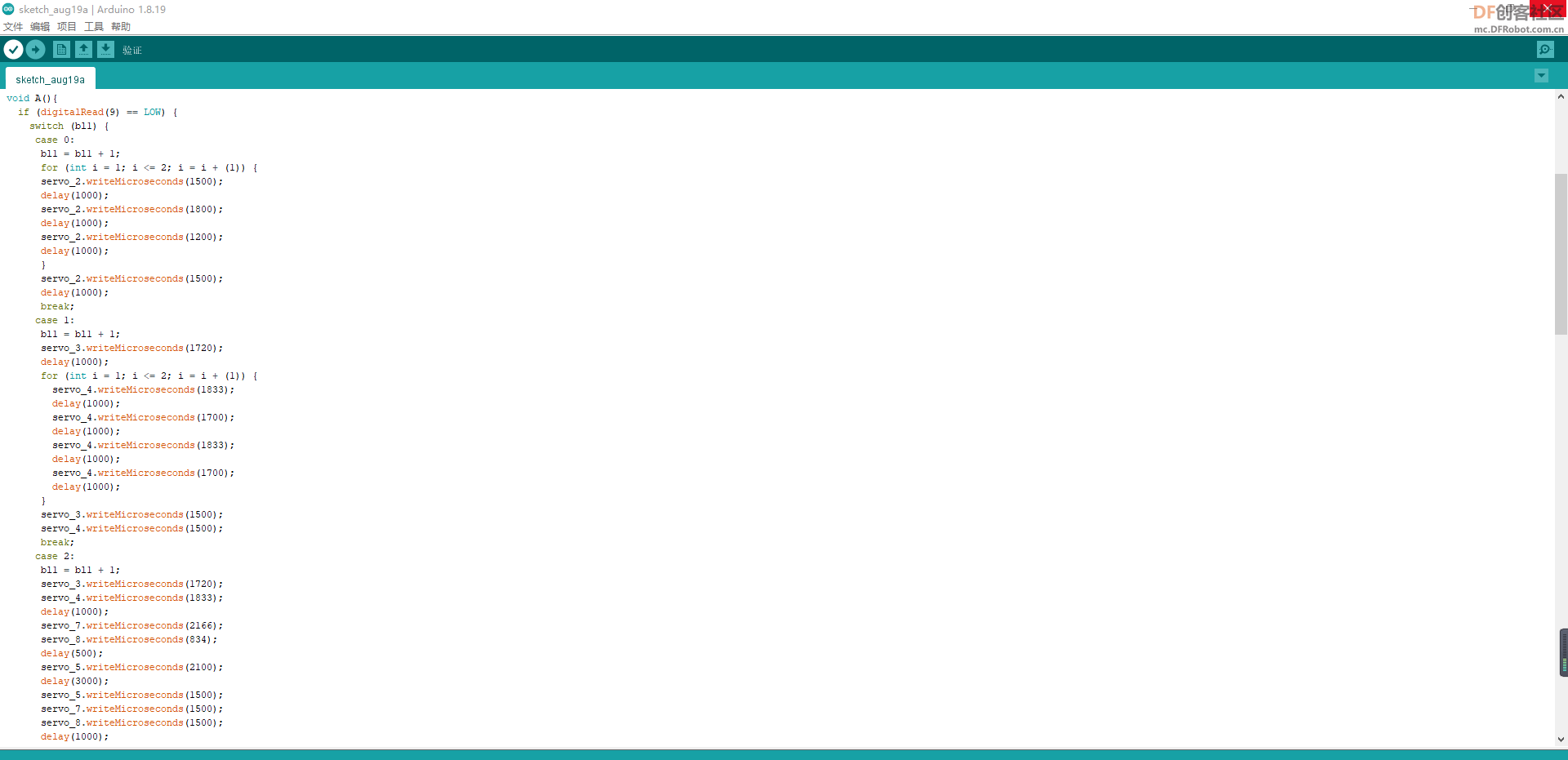 这些程序使得机械臂能够实现两个功能,一是自带程序(如握手、浇花、夹爪开合等)之间的切换,二是让机械臂识别并跟踪红色小方块,在小方块的诱导下一步步实现对目标物的抓取。  arm.zip arm.zip注意注意:由于arduino nano不是专门的舵机控制板,因此,在使用控制舵机旋转的“writeMicroseconds()”函数时,不能实现舵机旋转延时的效果,这时,我们需要引入一个for循环,让舵机从一个角度开始,循序渐进转到我们需要的角度。比如下面这段程序:  “Explorer Arm”在执行浇花的动作:  “Explorer Arm”进行视觉跟踪:  “Explorer Arm”在抓取橡皮:  总体来说,“Explorer Arm”最终的效果令人满意,实现了我造这台机械臂的初衷。当然,它还有进步的空间,欢迎大家提出意见。感兴趣的伙伴们,赶快造起来吧!!! 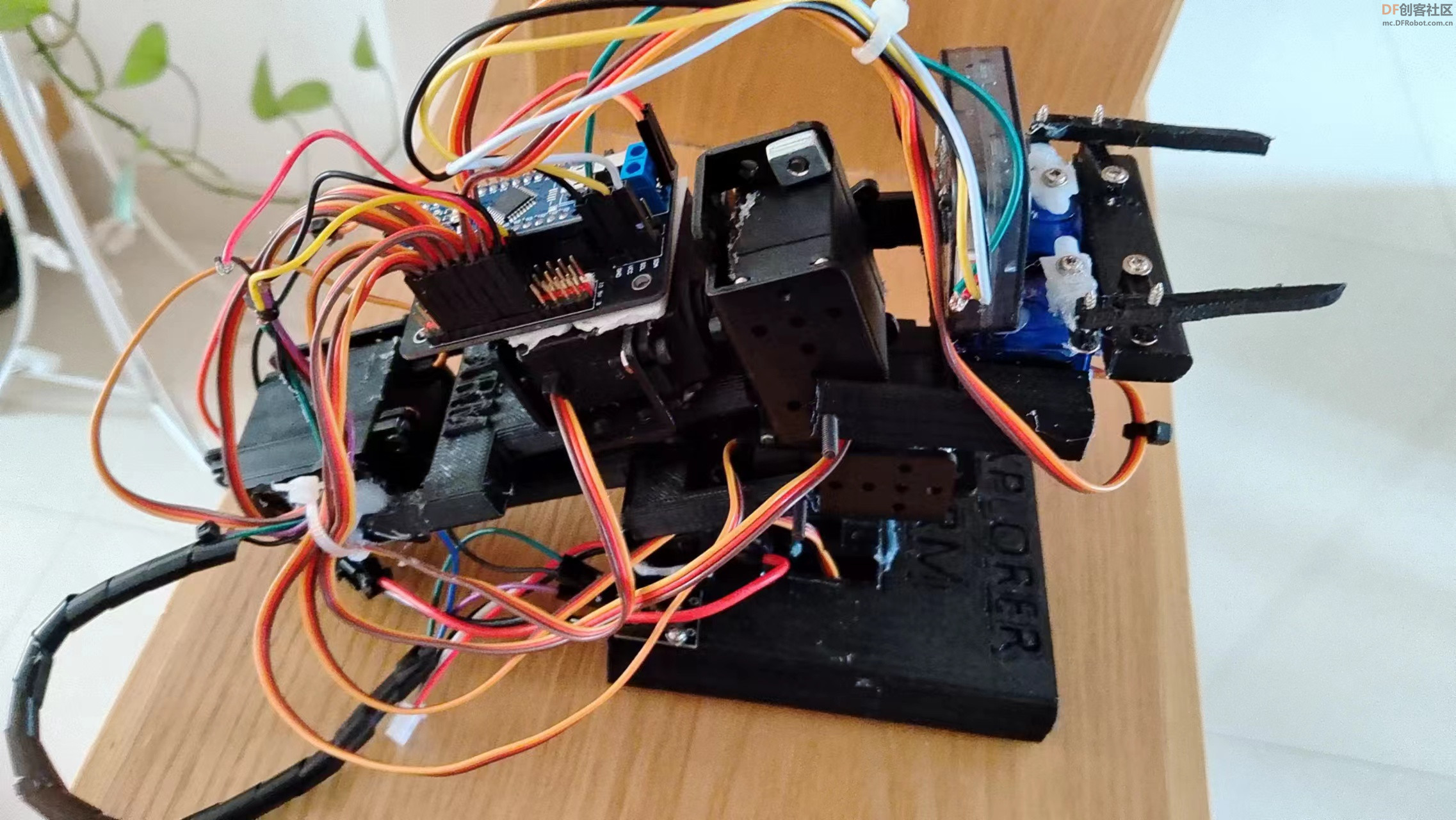 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶








