|
5116| 1
|
[项目] 跟我一起——手搓一台双足机器人 |
自己设计、制造一台双足机器人,想必是大部分创客的梦想,我——一个初中生也不例外。 前段时间,我在踢球的时候伤到了脚,只能打石膏,拄着拐杖出行。偏偏就在这时,走不了的我对人的双足直立行走产生了兴趣,那个从涉足机器人开始就有的梦想,又蹦了出来。我知道这对于自己来说可能太过有挑战性,毕竟自己设计就不容易了,要考虑材料、重心等问题,况且还要自己组装、编程……但我还是抱着试一试的态度开始了这个新项目~~有志者事竟成,这台机器人终于成功了! 这台机双足机器人名叫“块块”,顾名思义,就是长得方方正正的,像个小方块,可爱无比。它的主体仍由3D打印制作而成,共有八个自由度(左右腿各四个),其中头部卡槽内的两个舵机负责转向,目前用不到;腿部的控制双腿交替运动,脚踝上还有控制重心的舵机。“块块”使用的舵机型号为MG90S:  机器人的头部,主要起收纳电子部分及装饰的作用:  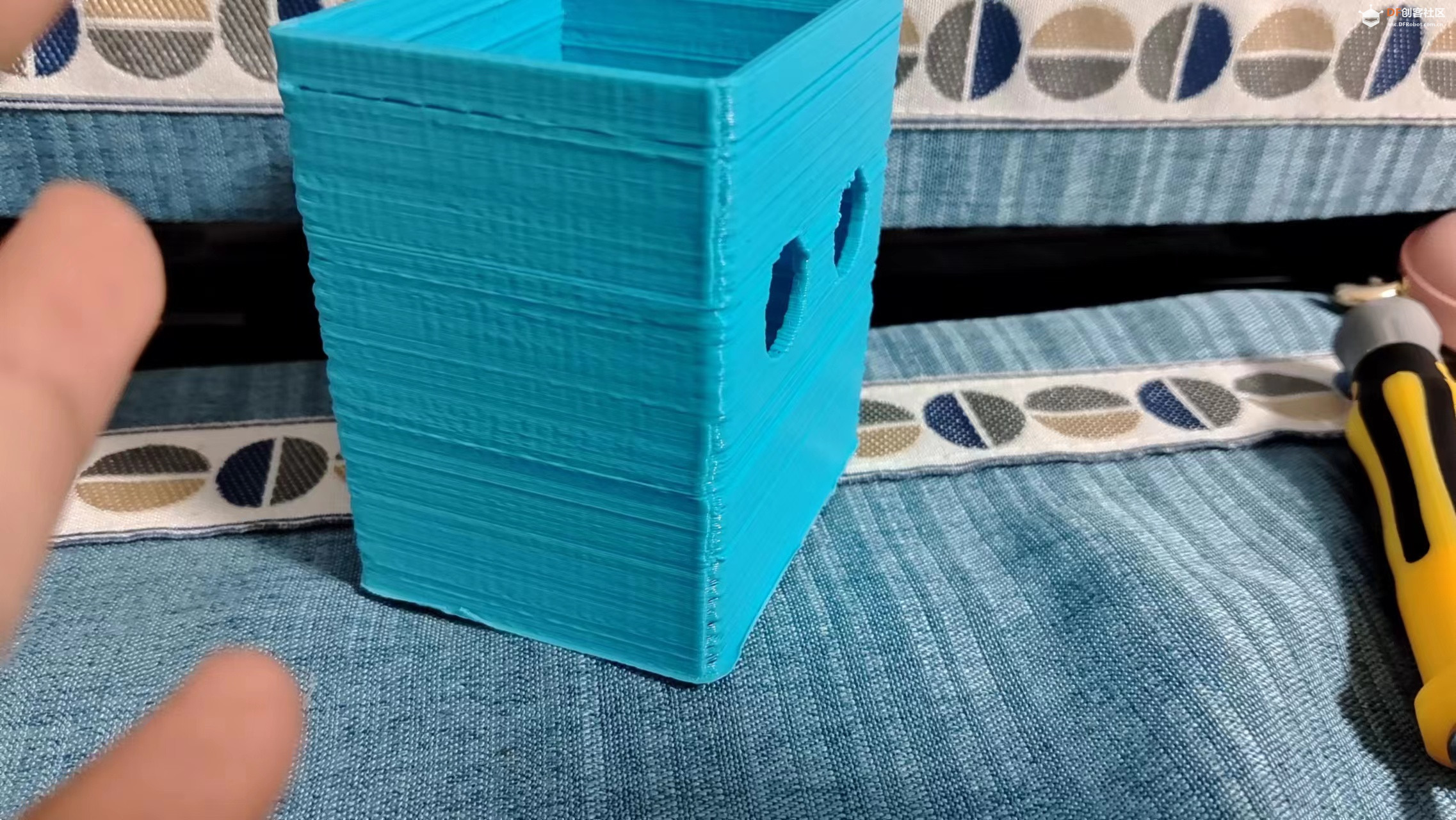 在机器人头部底下的两个卡槽中卡上舵机,并安装自己设计的舵机支架:  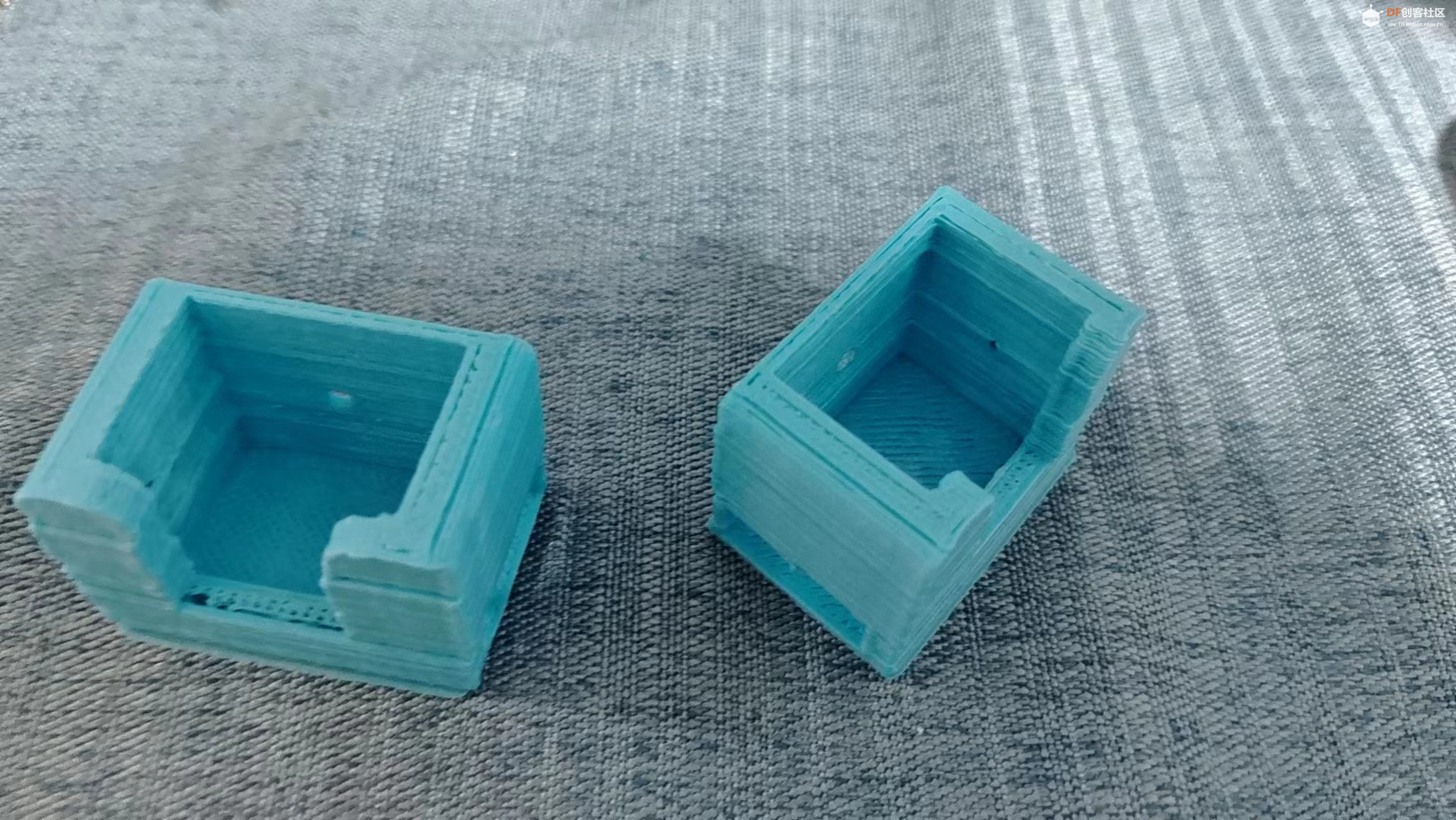 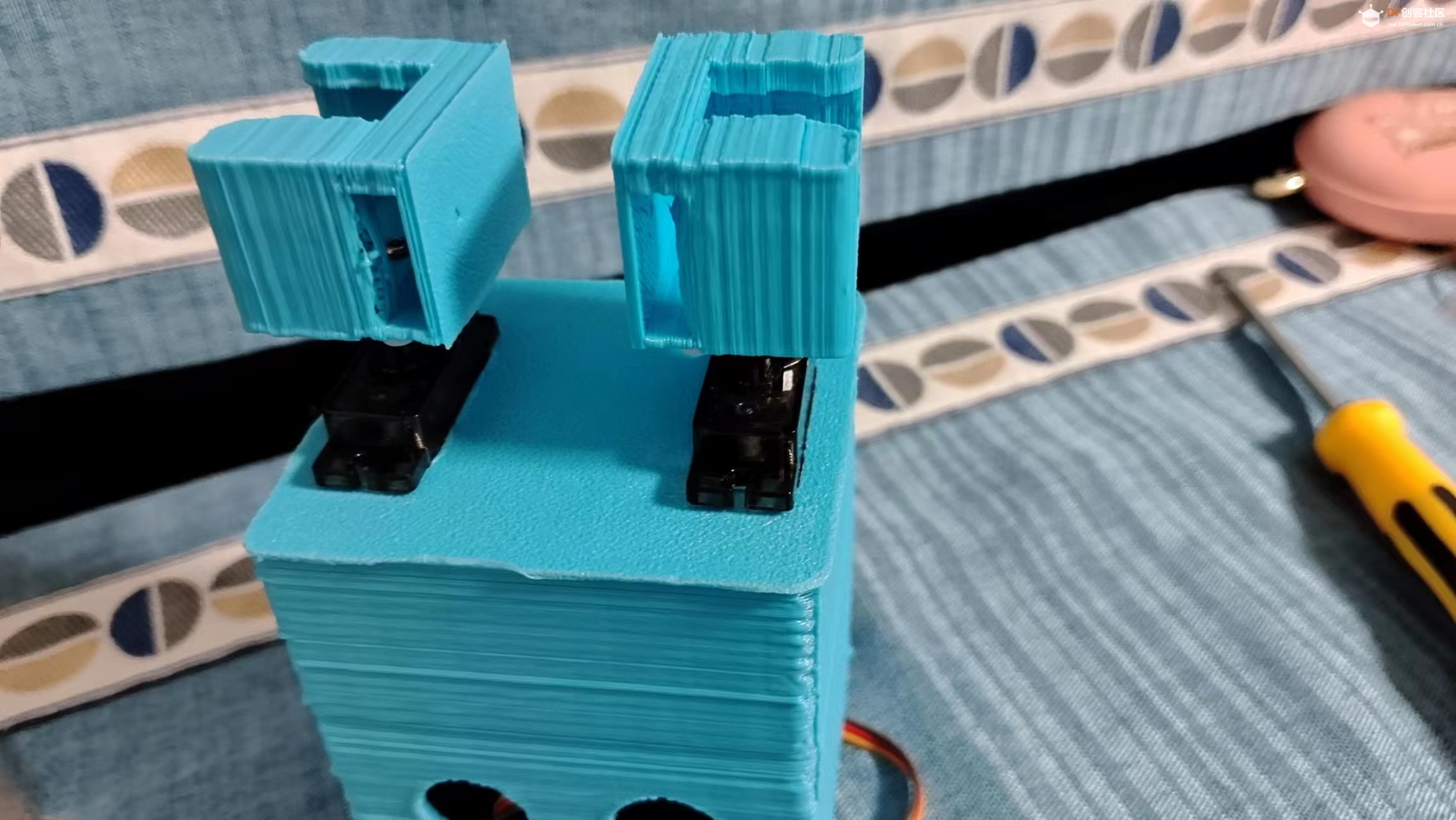 打印腿部。如图为其中一节: 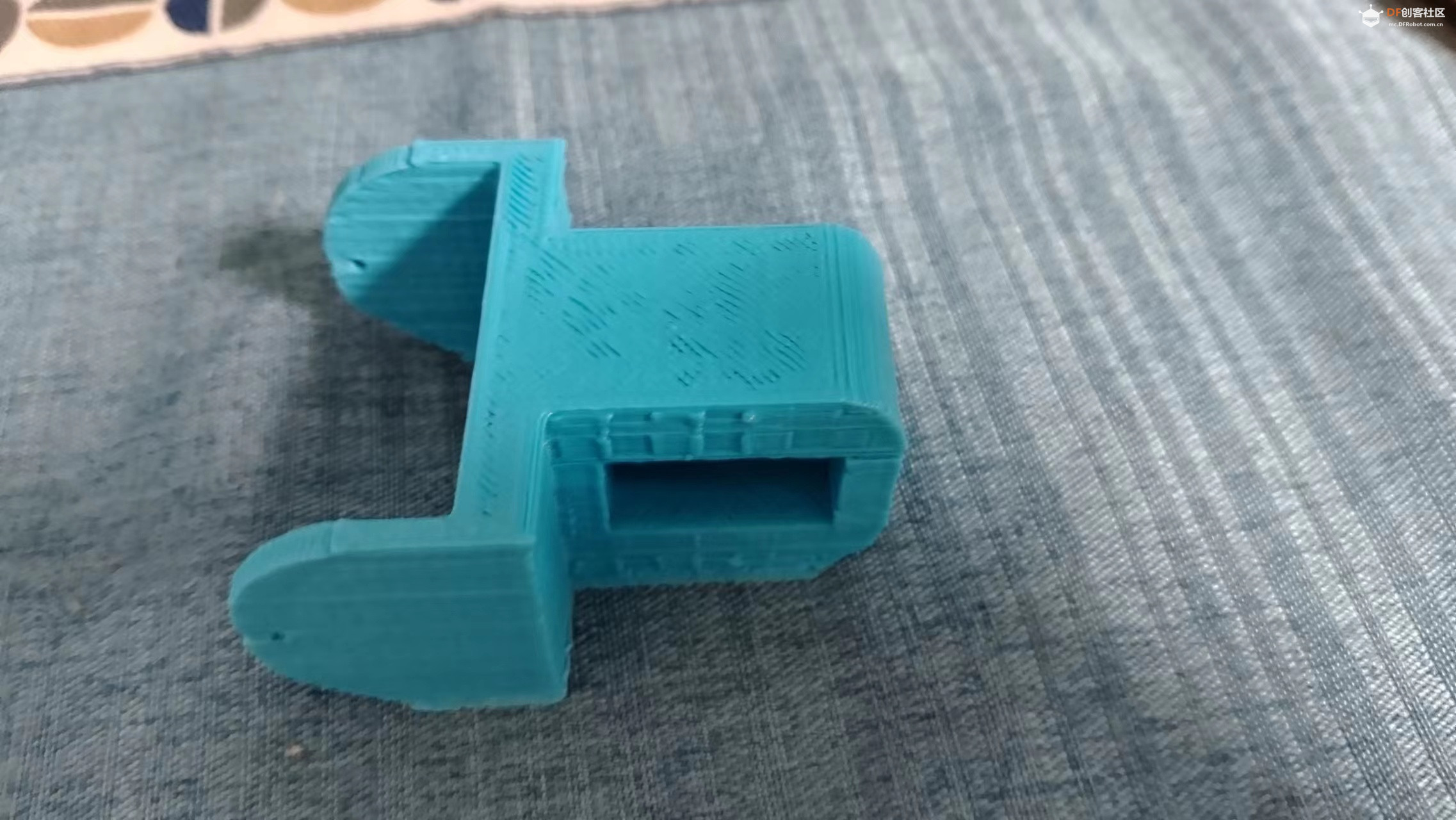 往一节腿部的卡槽中装入舵机,并把下一节腿部一端的两个轴连接到支架一端和舵臂上,并固定: 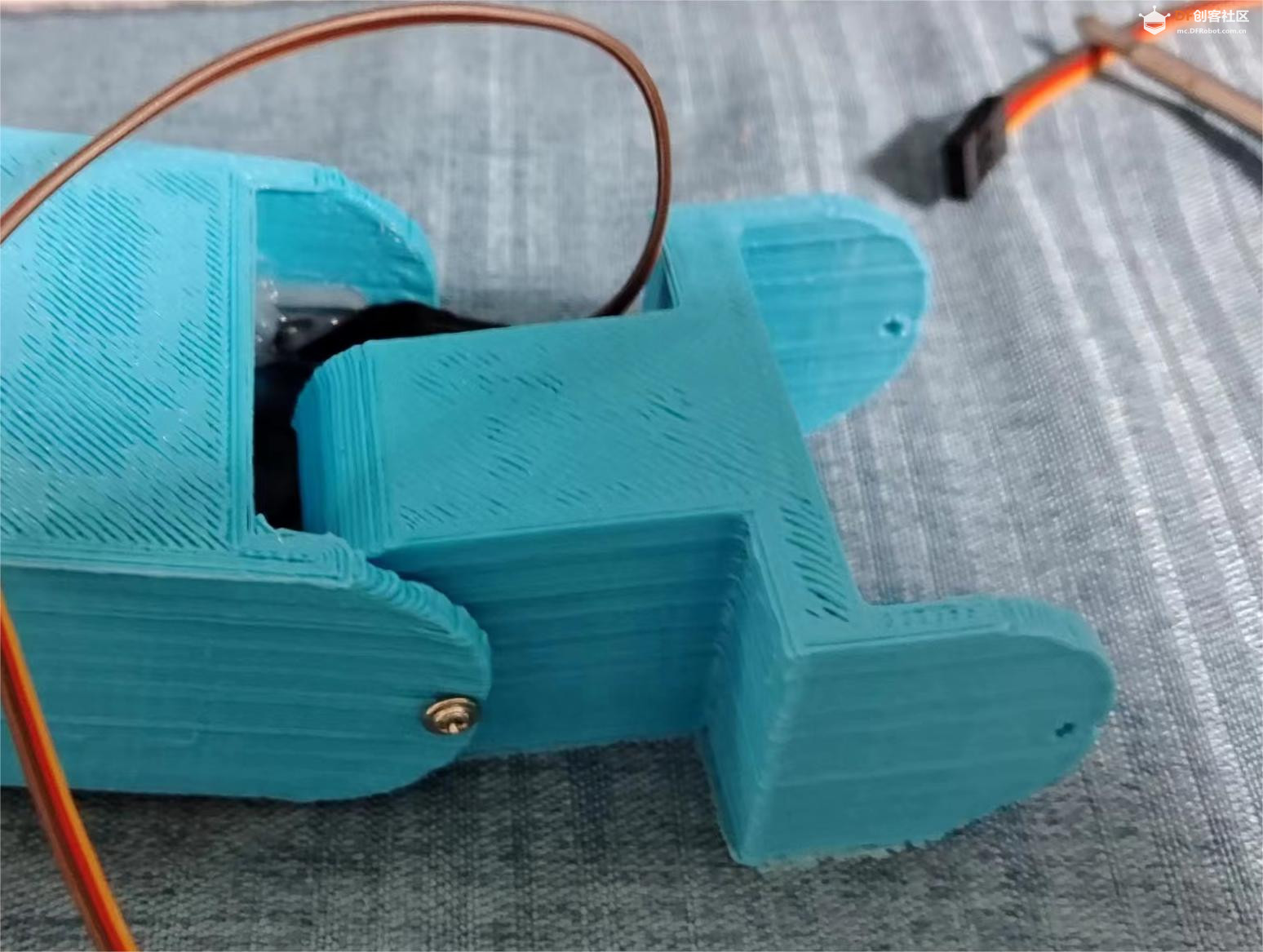 装配脚踝上的舵机支架: 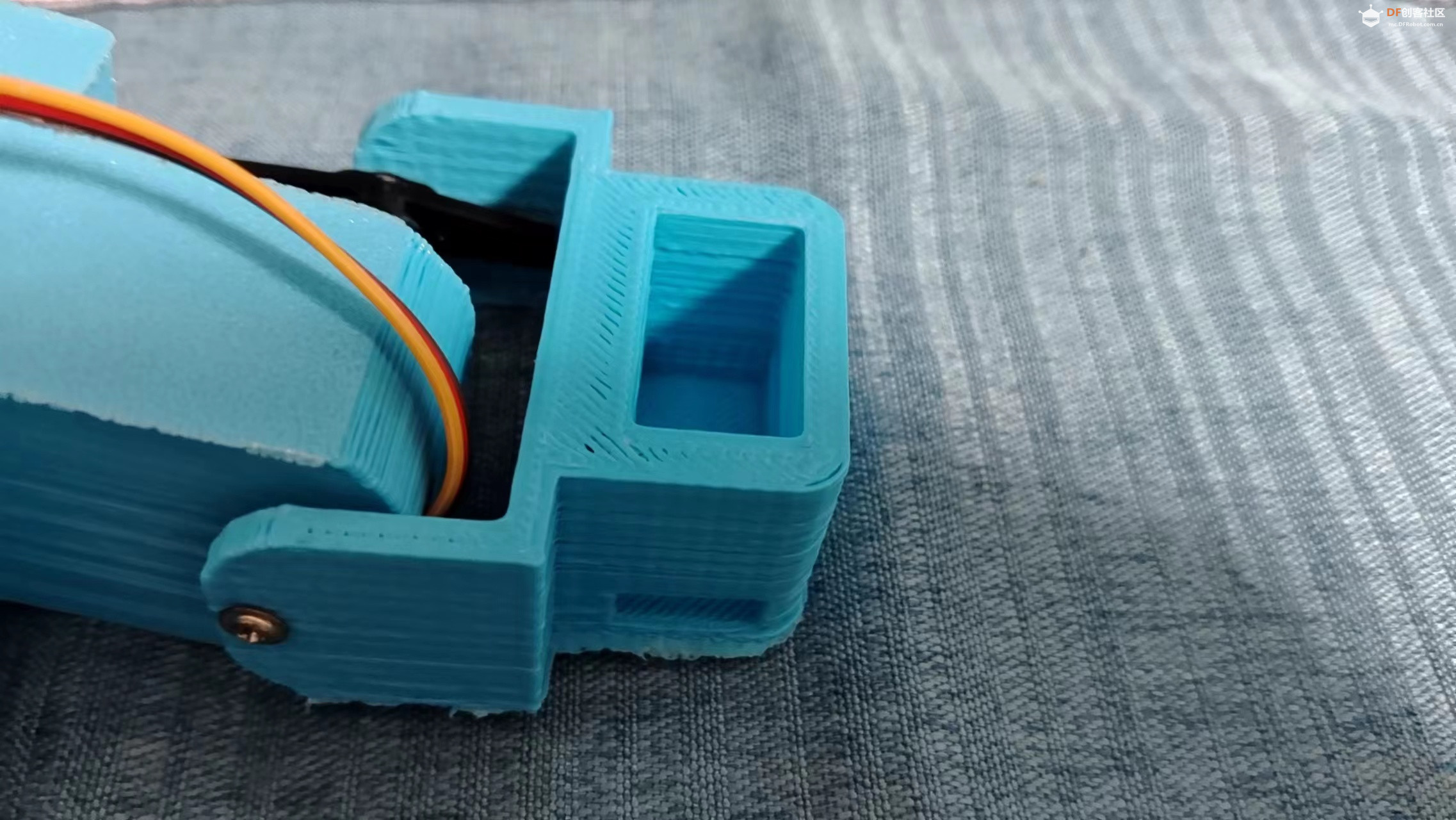 固定控制脚踝的舵机,并用安装腿部的方法连接脚踝上的舵机和脚板: 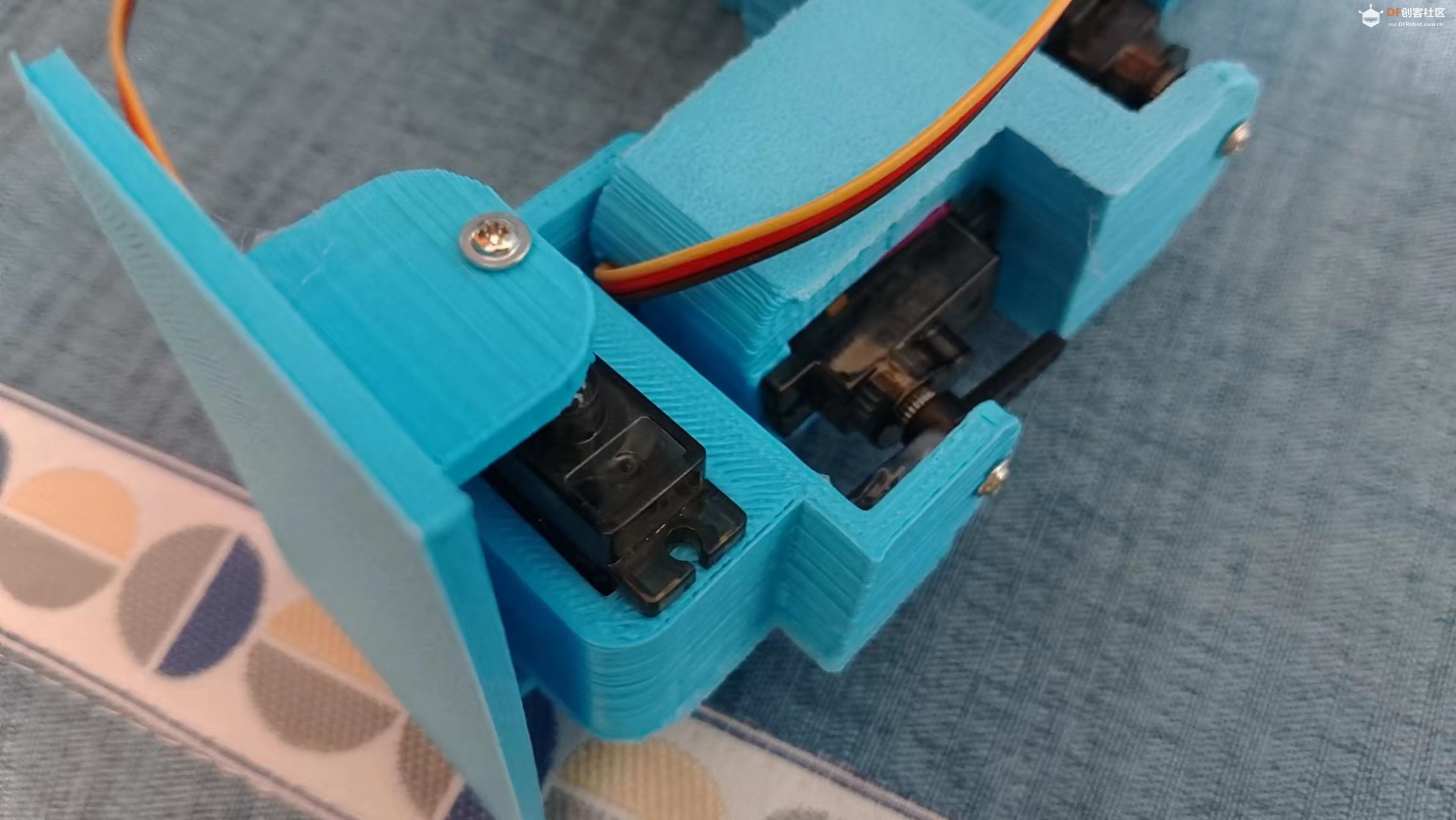  有必要说一下,脚踝起到转换机器人重心的作用,使其在行走时更加稳定,千万不要忽视了它~~刚开始,我为了图方便,没有给它设计脚踝,只是用两个螺丝固定脚板(视频里有提到),后来才发现这样不能转移重心,机器人根本没办法行走!我又考虑了网上的“工”字形足设计,但那样就会使得设计时需要考虑的东西太多,弄不好就会两脚打架,搞得人仰马翻。相比之下,脚踝的结构仍是最好的选择。 接下来,如法炮制制造第二条腿,把两条腿连接到头部底下卡槽内的两个舵机上: 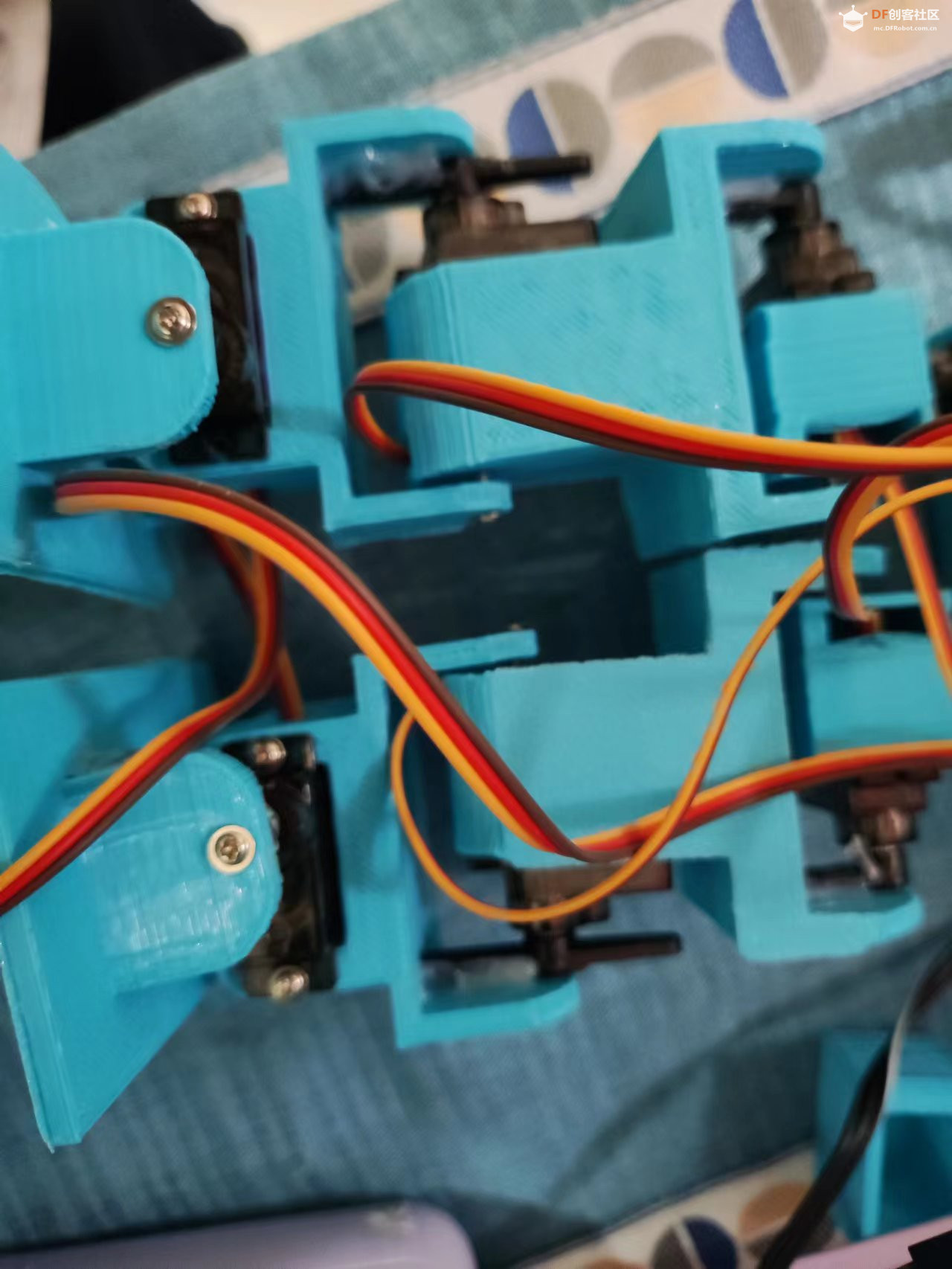 电子部分,主板还采用了Arduino nano。把机器人的8个舵机连接到主板的2~9数字引脚上,注意整理好线路,否则会影响机器人的运动。  最后装上电池,硬件部分就大功告成!先来几张美图: 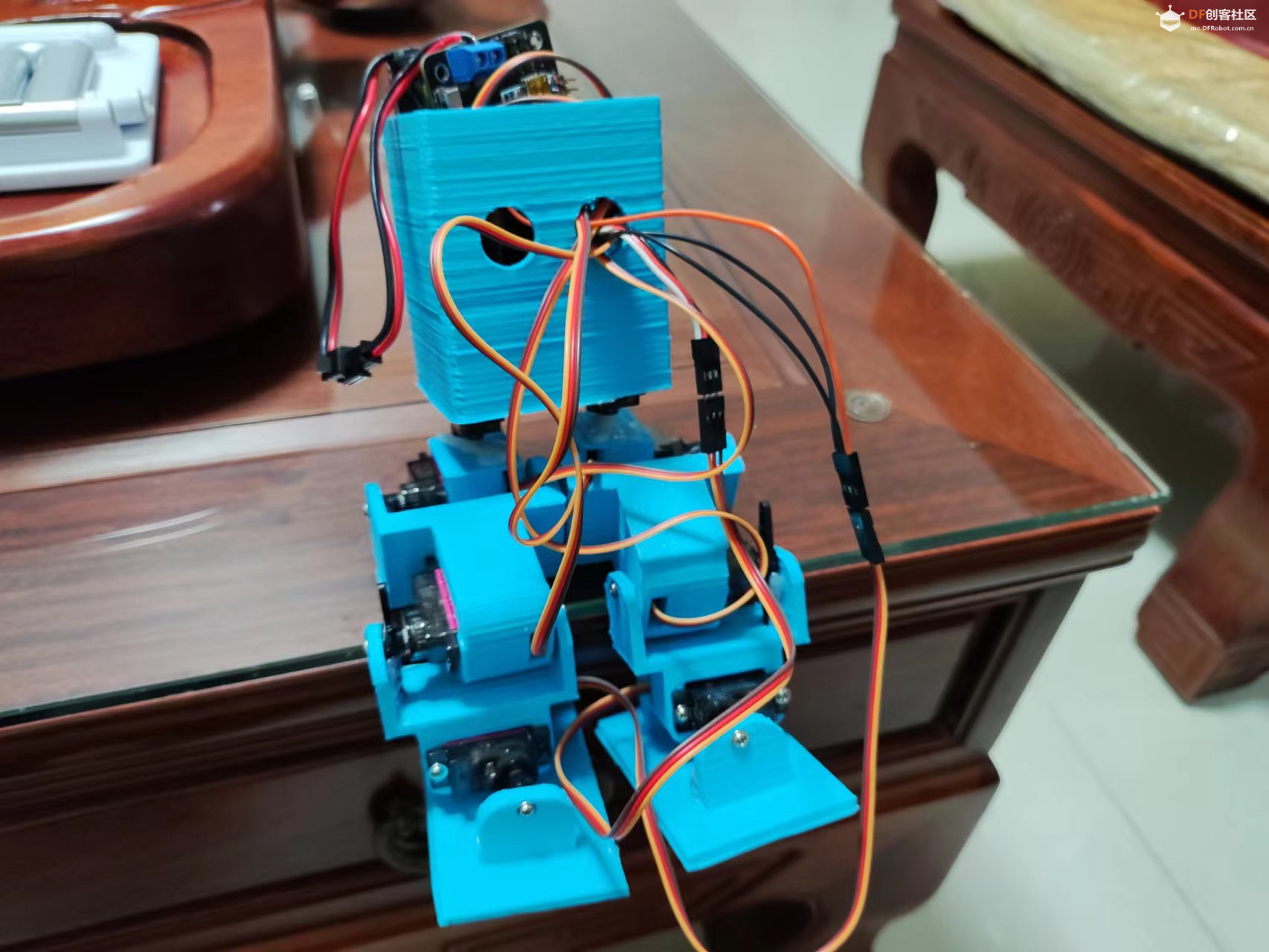 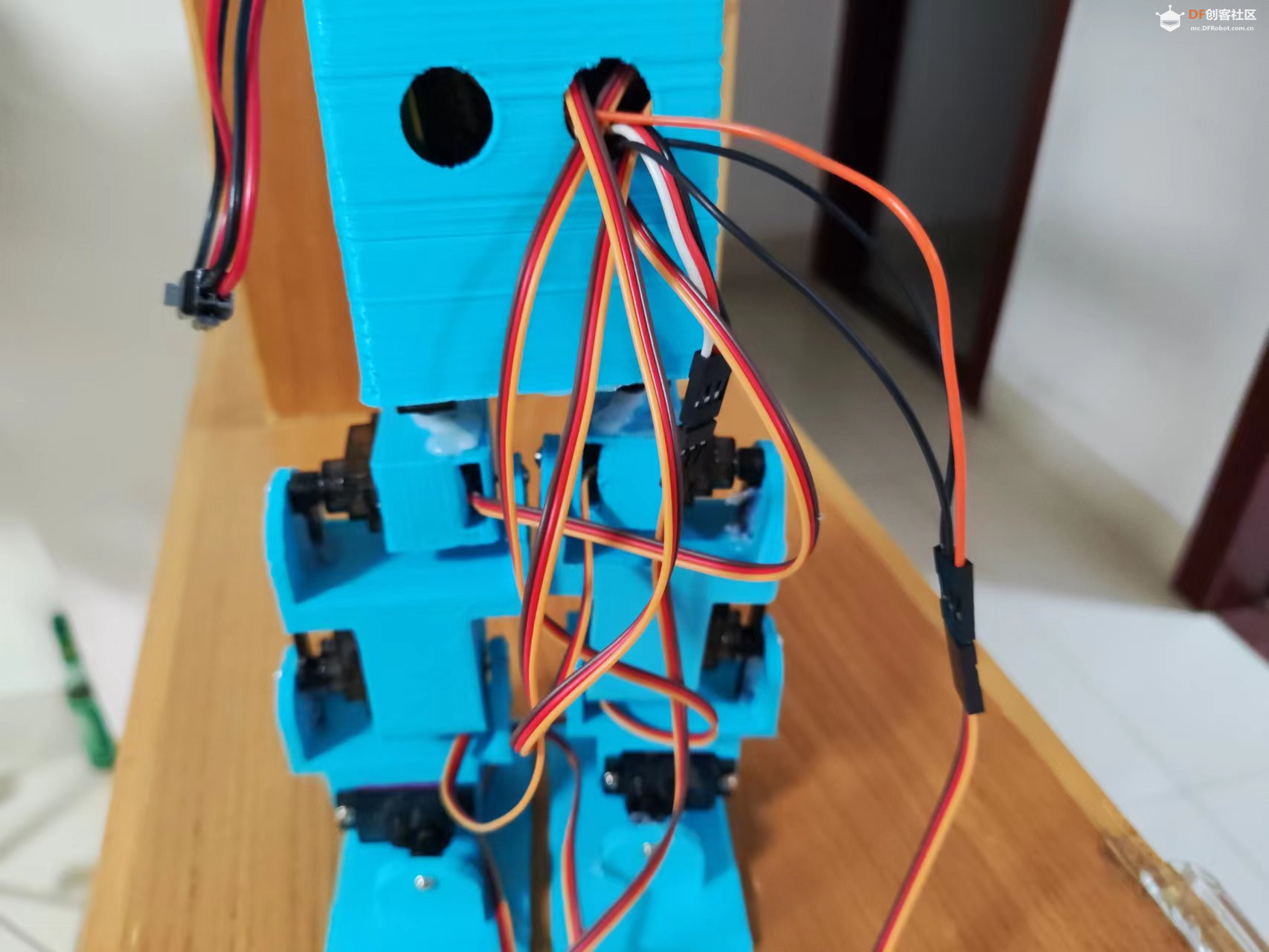 程序是这台机器人的关键。由于这台机器人没有传感器的反馈,属于开环控制系统,所以我测试了好几次,才得到了这份还算满意的程序。这台机器人的程序用arduino IDE编写,核心是几个for循环,控制机器人的双足交替运动及脚踝的重心转移: 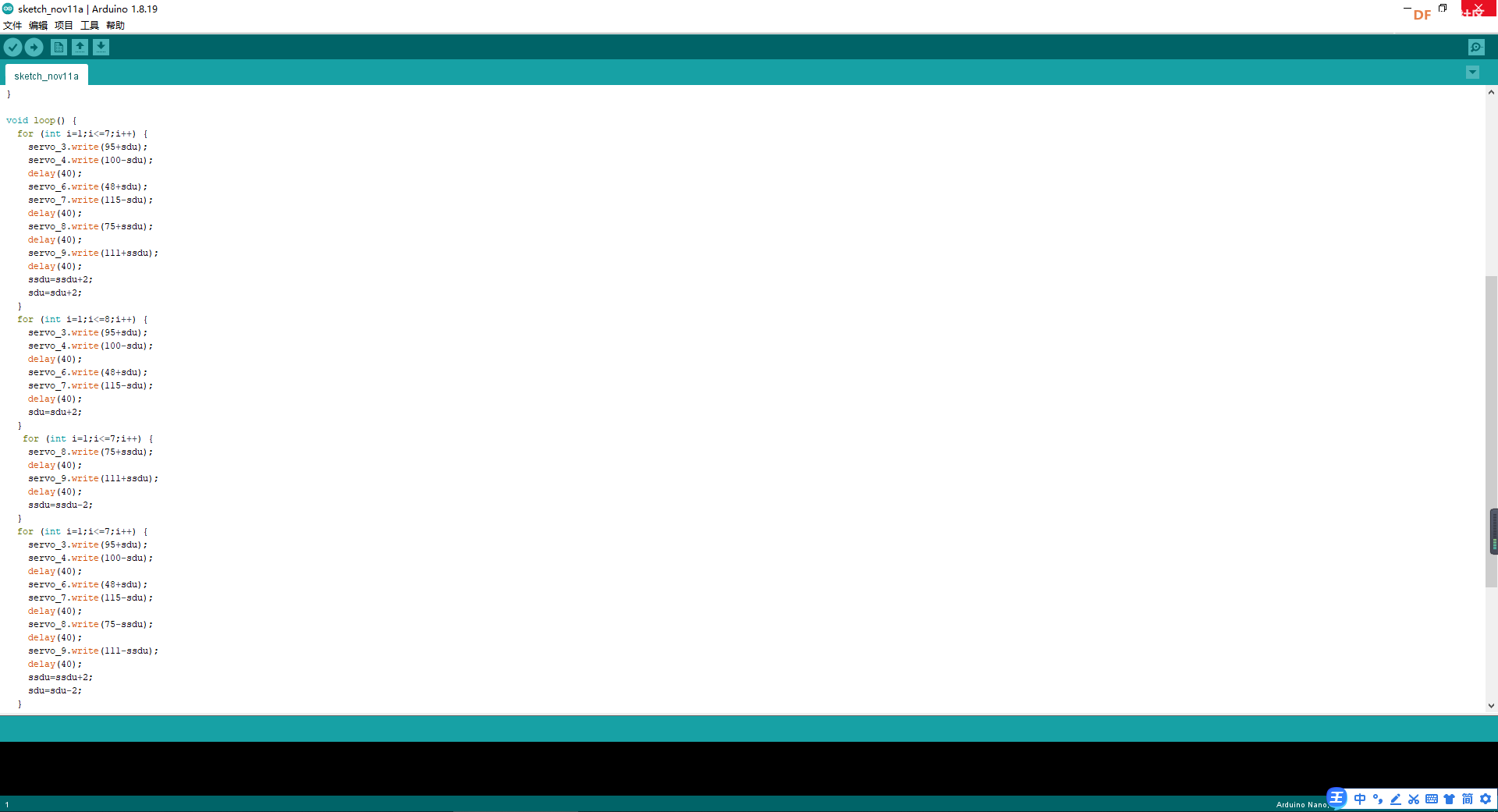 最后,上传程序,打开开关,双足机器人“块块”成功的走了起来! 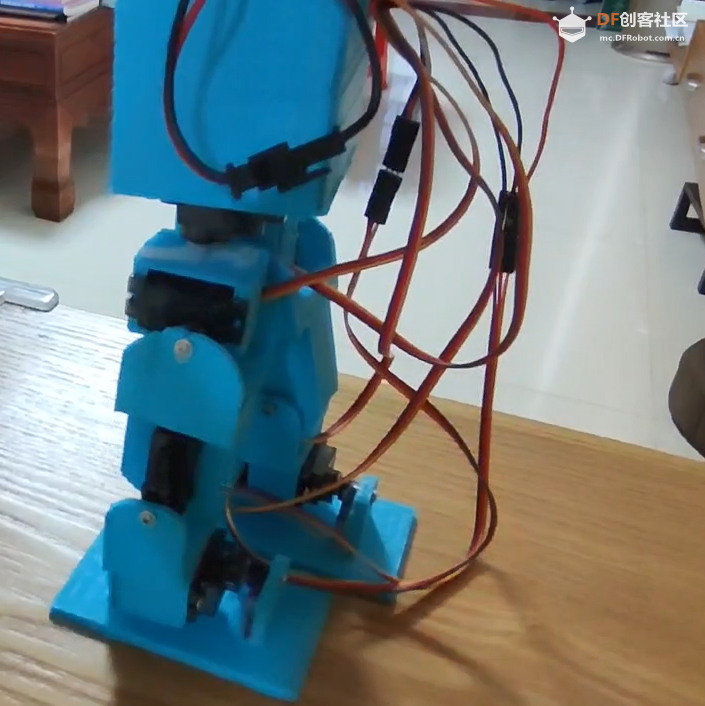 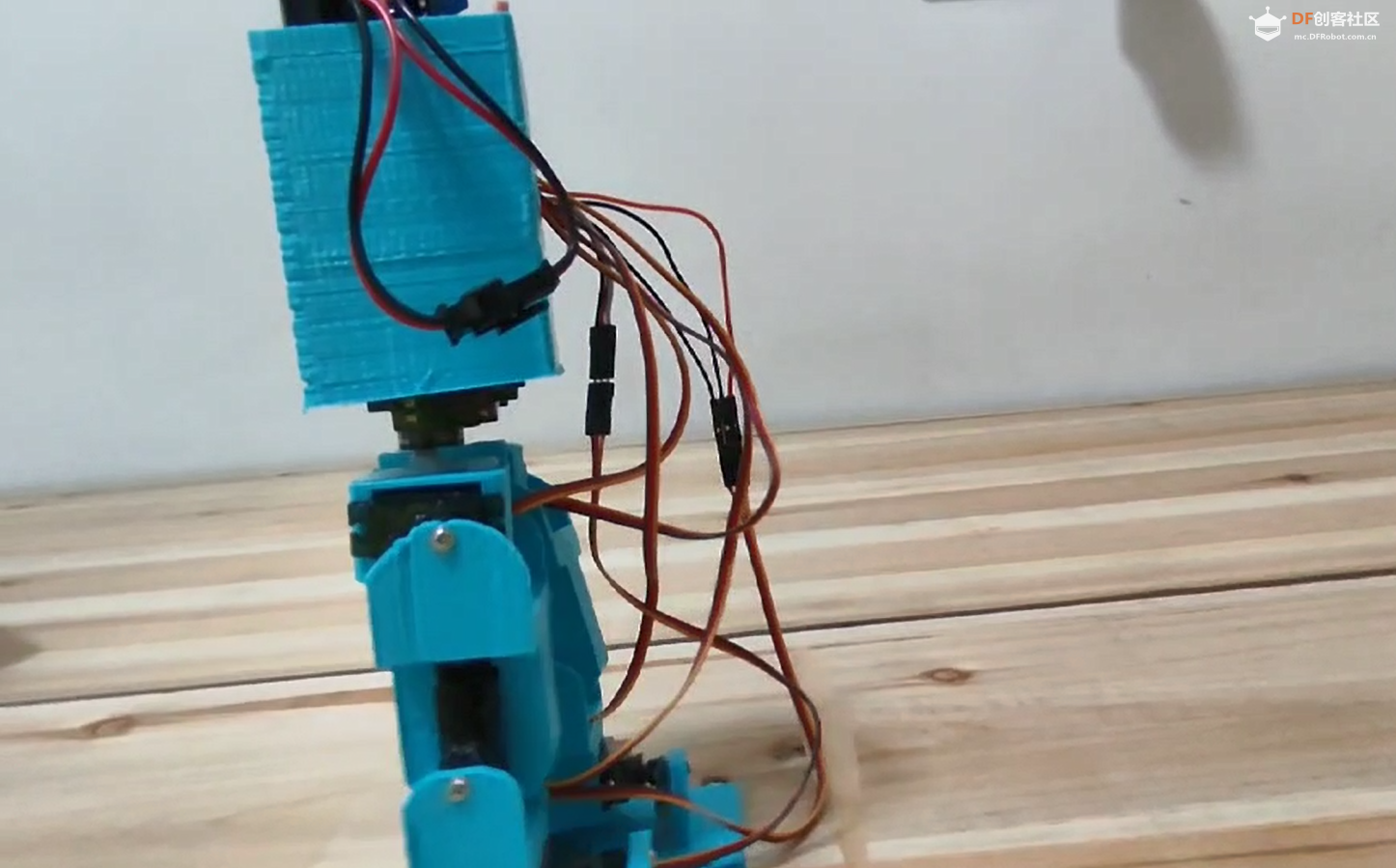 后续,我还会对它进行改进。目前的它只能直行,我希望它能够进一步实现转弯的功能,再加上一些传感器、执行器,成为一个实用性的机器人!加油,追光的人终将光芒万丈!!! |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







