|
73586| 4
|
[项目] 重磅!快看我自制的有趣机械臂“GOOD ARM”! |

|
本帖最后由 小津子 于 2023-7-31 15:48 编辑 大家好!又到了分享新项目的时间,这一次,我给大家带来的是一台小巧的机械臂“GOOD ARM”。创客少年归来,先为大家奉上视频,一睹为快吧! 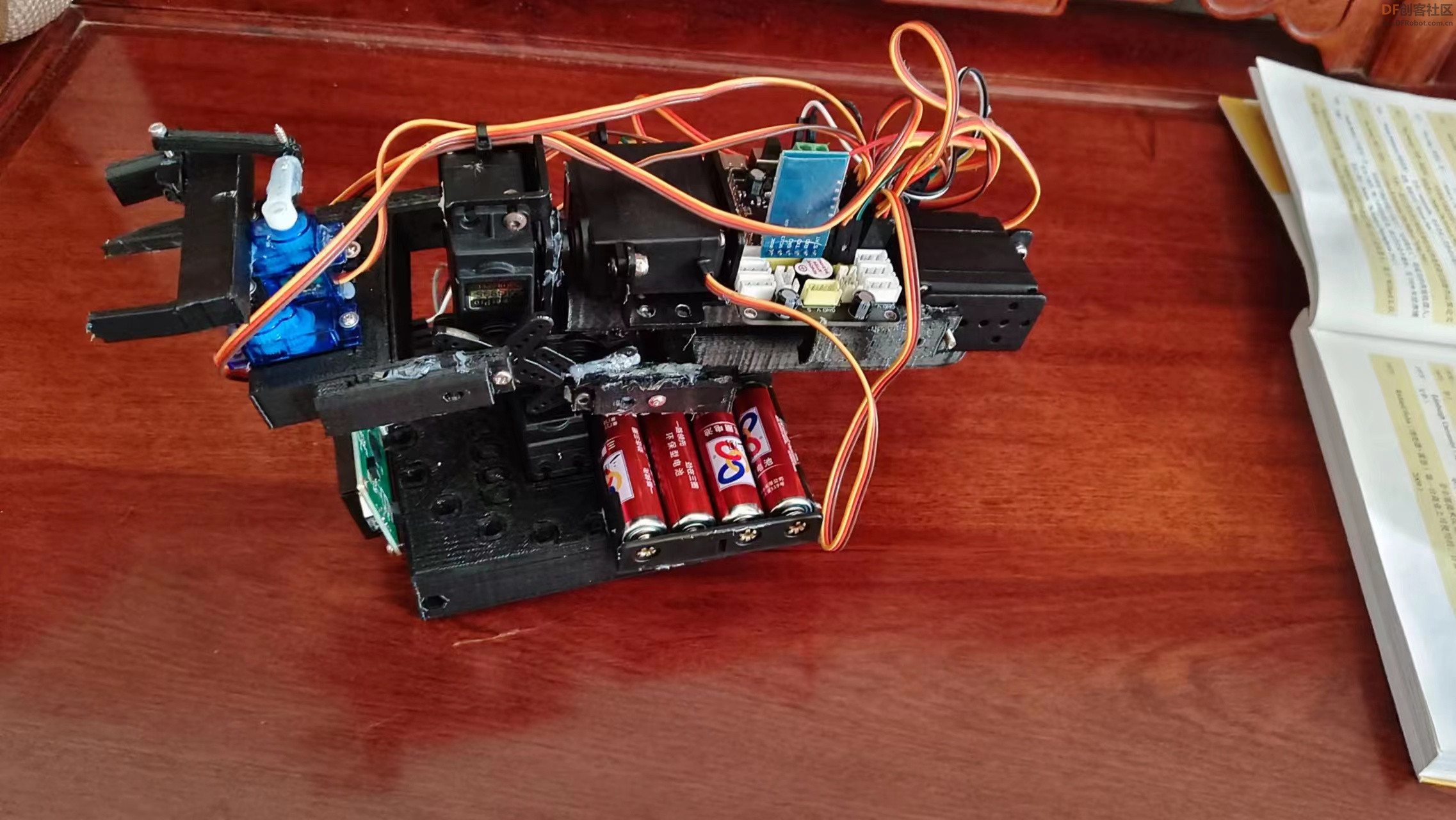 我在很久以前,就有自己造一台机械臂的念头了。制作这台机械臂的本意,不止是为了无聊的时候玩玩罢了,还有在生活中,让抓取某些物体更加方便。 我为这家伙付出了很多,牺牲了许多课余以及假期时间。因此,它的成功让我倍感兴奋,也觉得自己的辛苦没有白费。 话不多说,接下来介绍制作过程。 首先是硬件部分。在机械结构上,我制作一台五自由度且配备双末端执行器的关节型机械臂。底座加大,尽可能降低重心,舵机采用双轴输出,增加稳定性。而这一切,我决定采用3D打印技术来实现。 我用的3D打印机是500多块钱买的小鲁班3D打印机。我花了两周多的时间组装它,打印效果还不错。精度虽然略逊一筹,但对我来说已经不 错了。 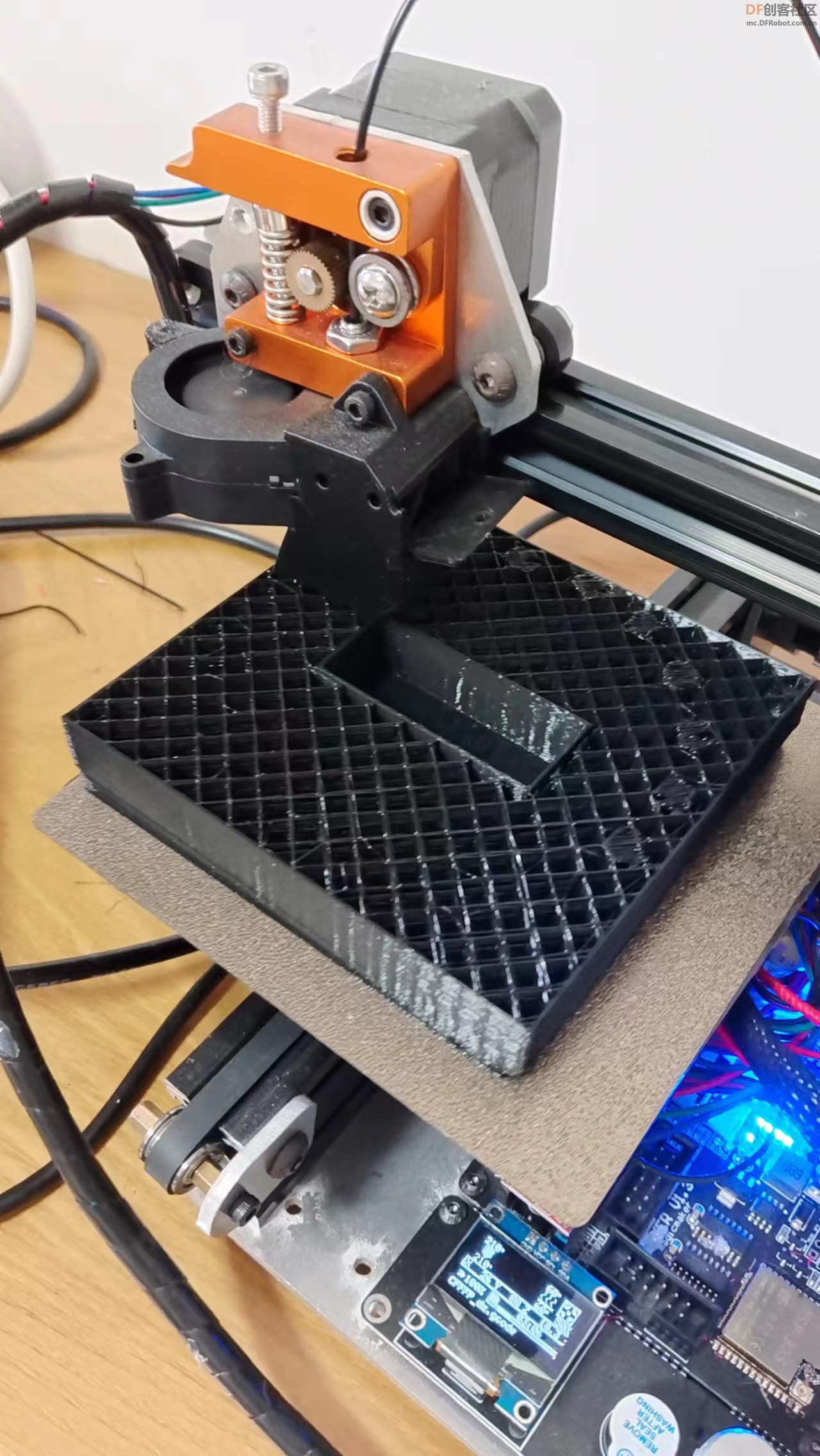 部分3D设计图样: 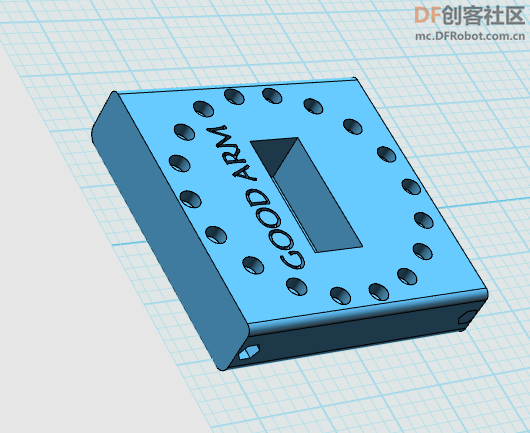 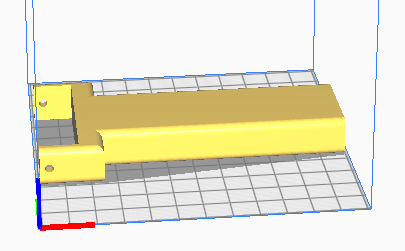 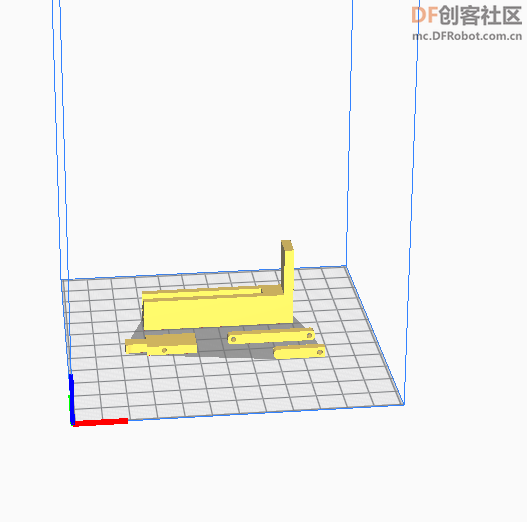 这是打印好的底座和机械臂,以及一些小连接件。   接下来开始组装。首先,把XY关节插到底座上。我使用的是MG995舵机。 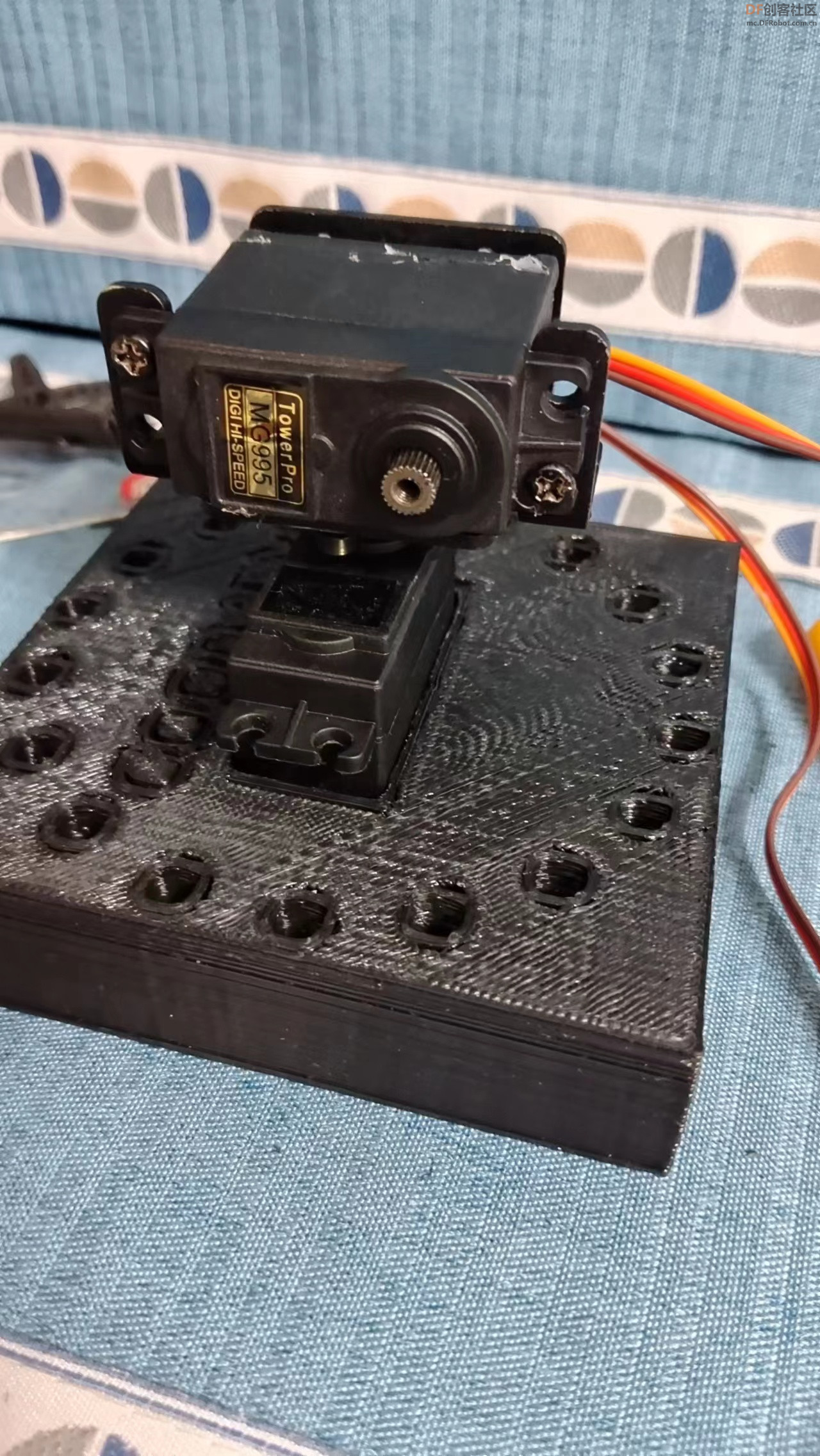 接下来安装第一段机械臂。 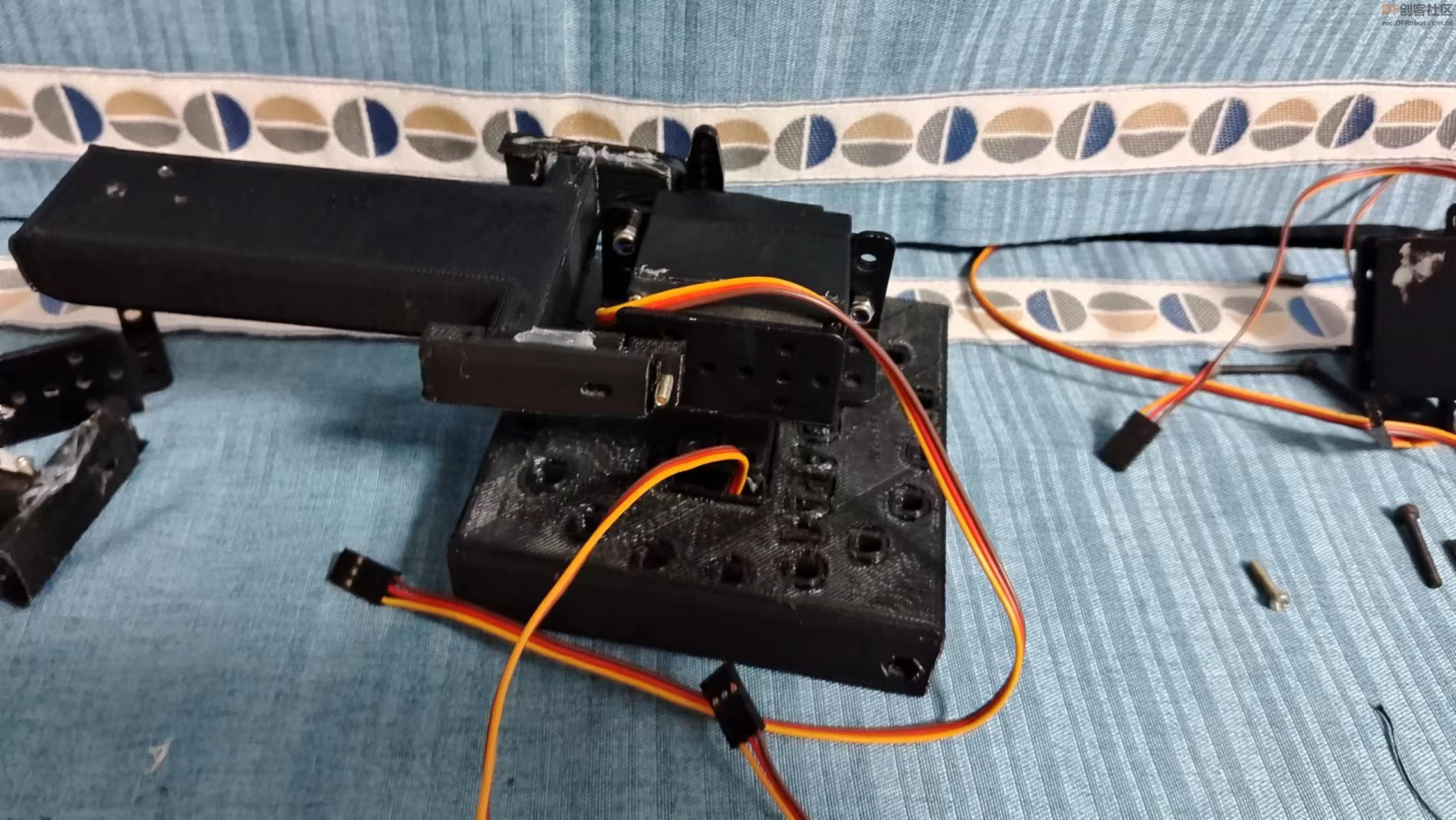 末端固定上舵机,而后装配第二段机械臂: 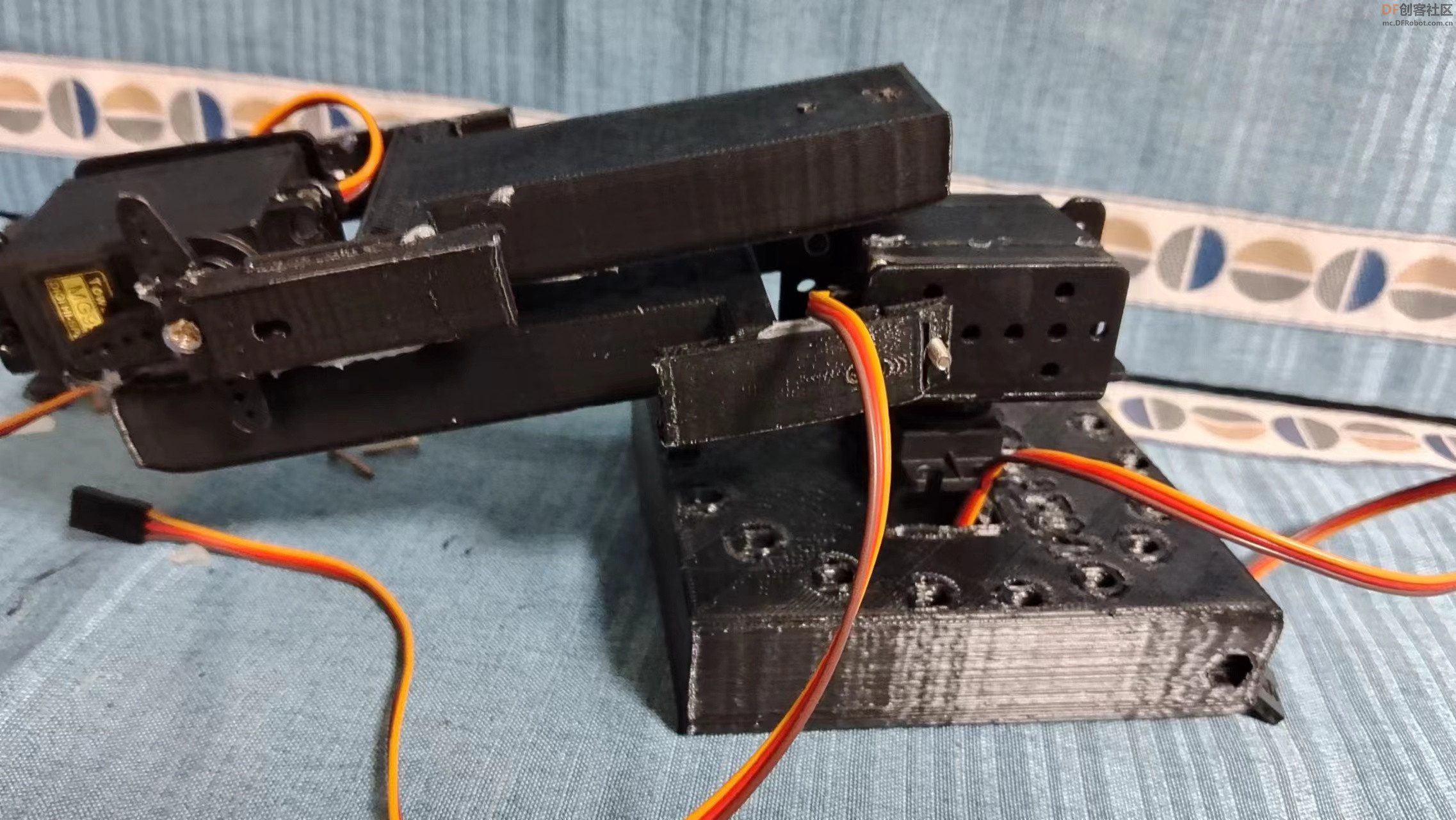 安装第二对XY关节,那是机器人的手腕。注意:钻孔一定要对位,螺丝得锁紧。  最后,是至关重要的末端执行器(EOAT)。就是机械手。这东西非比寻常,我给他设计了两台末端执行器,像超人一样。一个是二指角度夹持器,由两个SG90舵机控制。安装上去的效果。 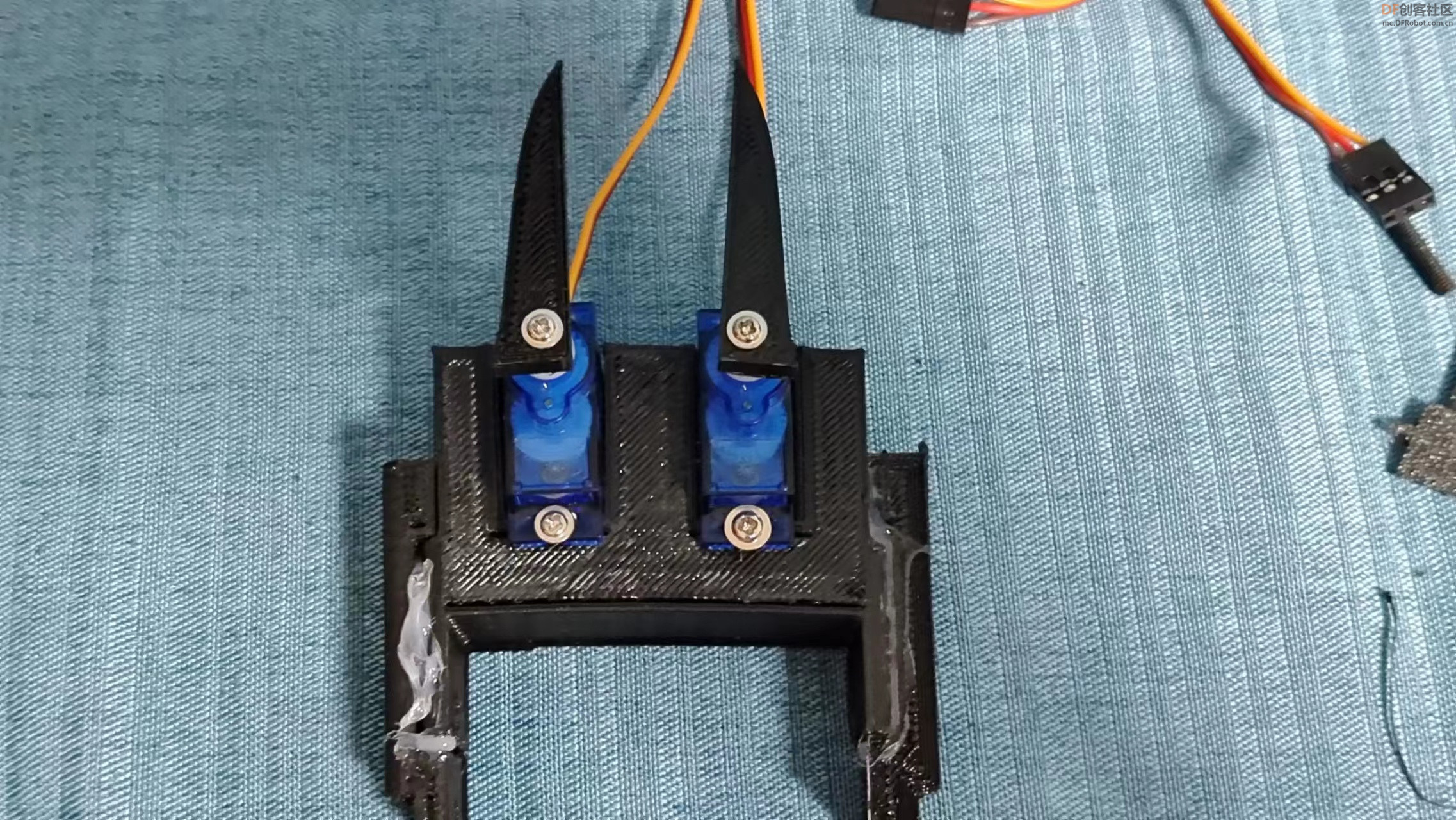  还有一个是二指平行夹持器。平行夹持器,以其超强的适应能力著称,我的机械臂里不能少了它。我设计了一个由SG90舵机控制的平行夹持器,采用了一个曲柄滑块机构。但末端的位置太小了,这家伙要装在哪里呢? 思来想去,我决定,采用分层设计,把它装在角度夹持器上方,滑轨与下方的舵机轴对齐,这样子,平行夹持器工作时,只需把角度夹持器张开成平角即可,而平行夹持器又不影响角度夹持器的工作,真是一举两得!双夹持器,也是这台机器人的一大特色。 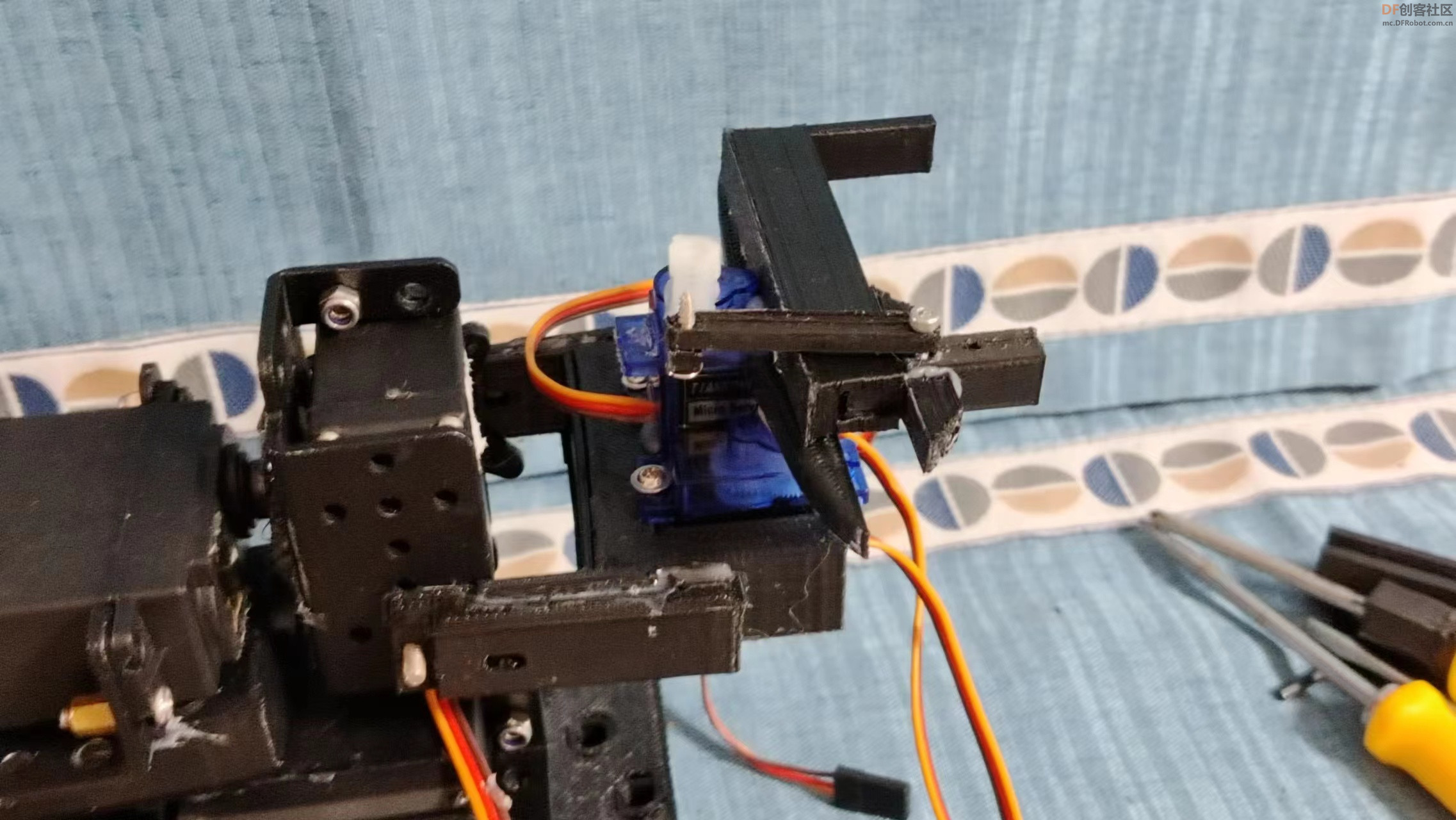 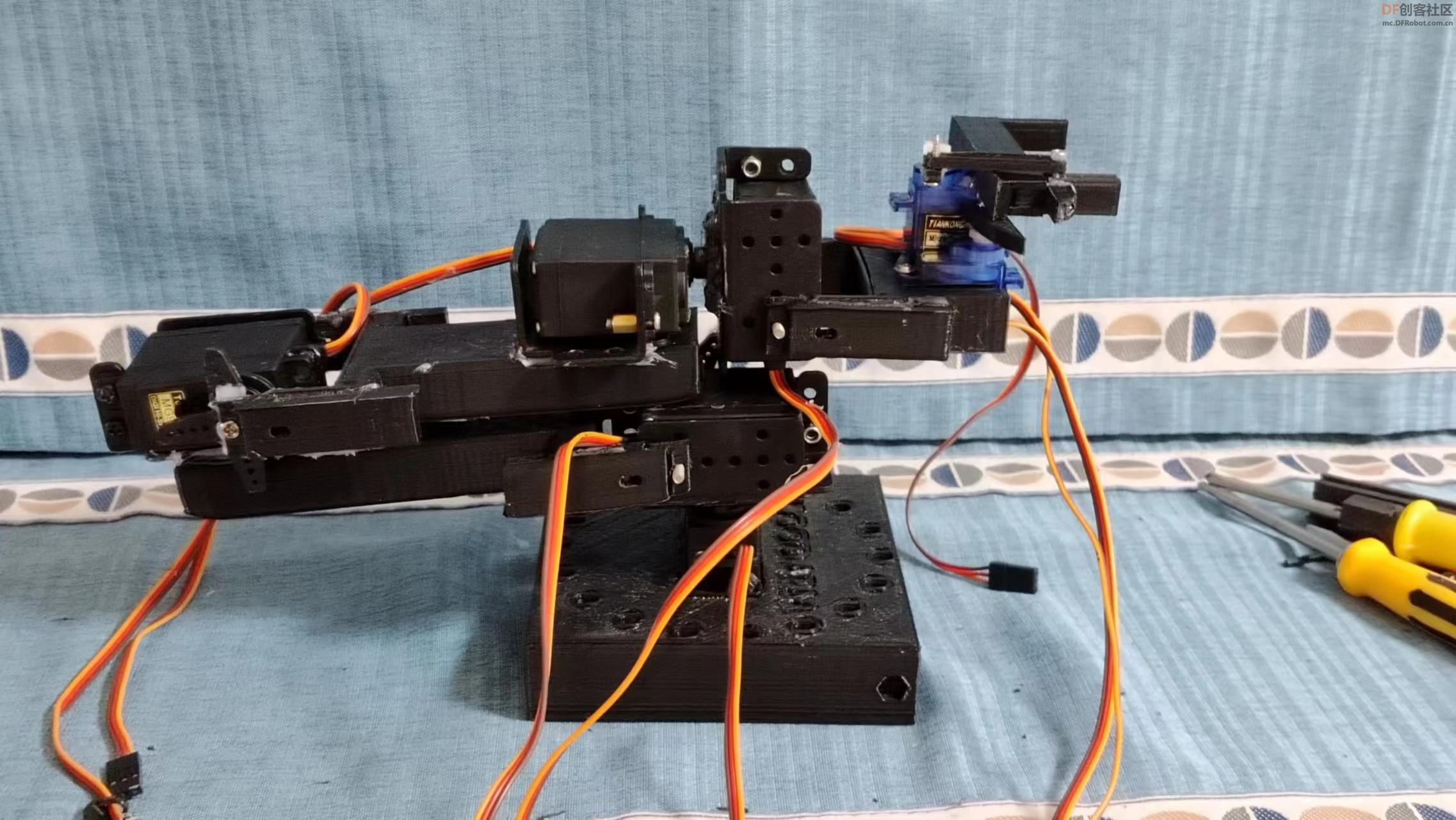 机械部分制作完毕。电子部分,我采用了熟悉的Arduino与众灵科技24路舵机控制板的强强联手。又使用了一块LCD显示屏和温湿度传感器,既能够显示机器人的工作状况,还能使其成为迷你气象站,这也是机器人的一大特色。    最终成品: 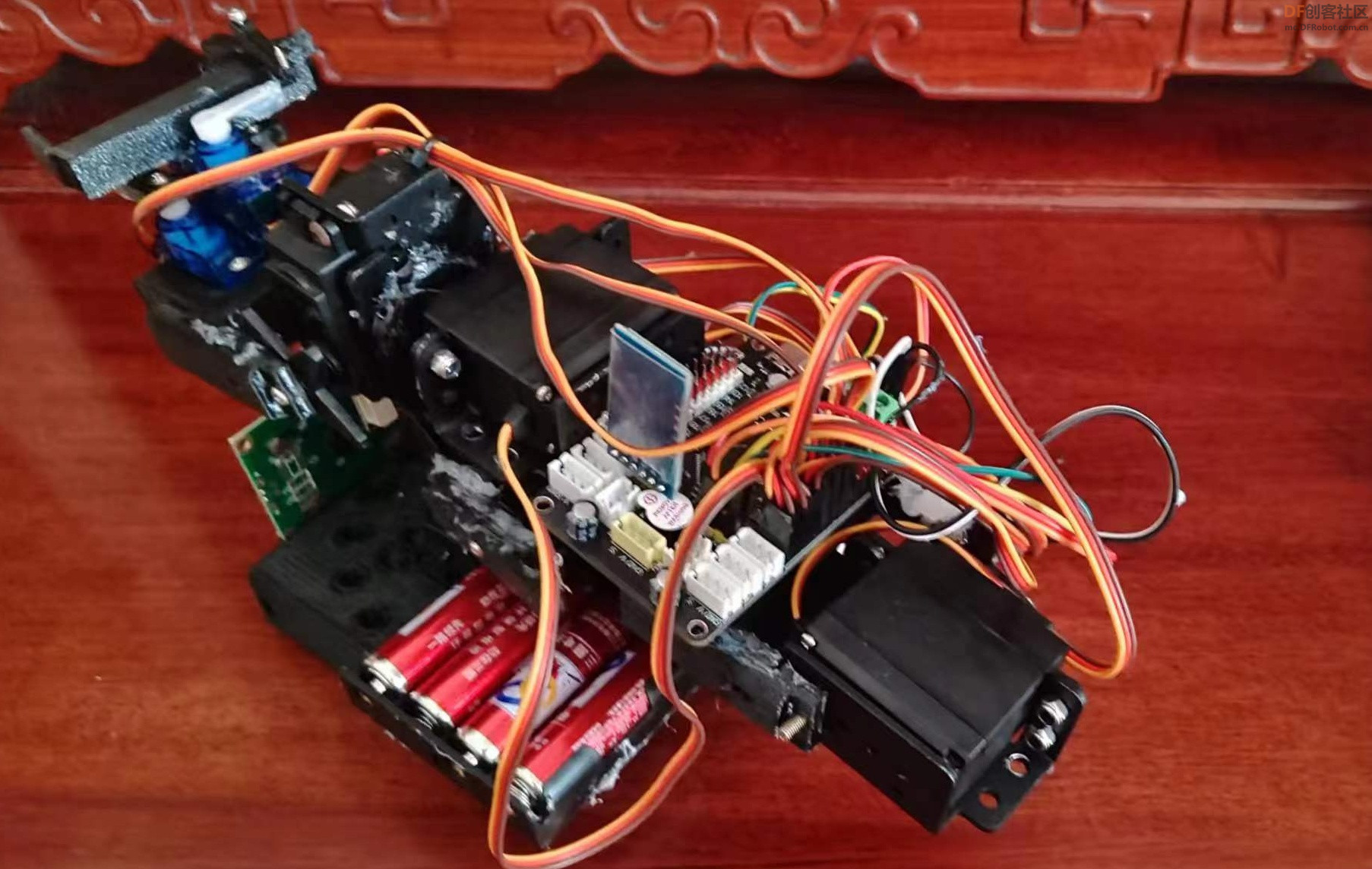 程序是机器人的灵魂,没有程序的机器人只是一堆废物。程序部分,我采用3种方式来控制机器人。 1,米思齐库。我用米思齐写了一些示例程序,并导出成库,方便调用,用户可在此基础上对照自己想要实现的功能实现自编程。 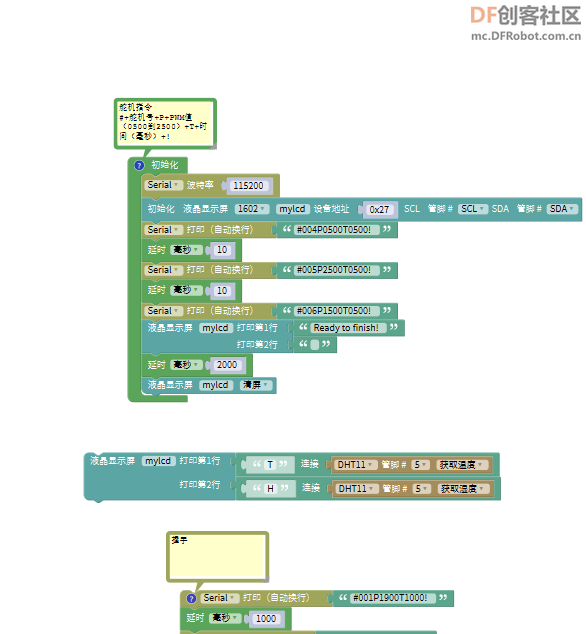 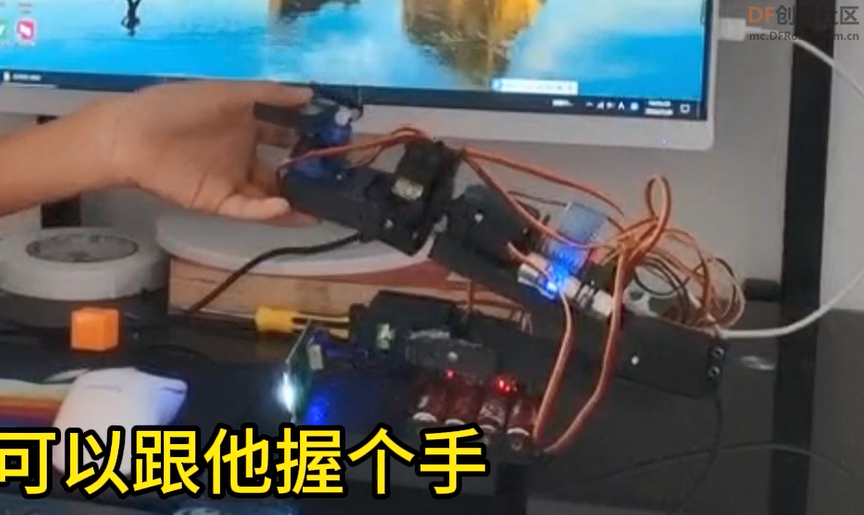  GOOD ARM.zip GOOD ARM.zip2,蓝牙控制。舵机驱动板上有蓝牙接口,插入蓝牙模块就能用微信小程序进行控制。但由于按钮需要自己配置,所以我不推荐这种方法。 3,上位机控制。由于众灵科技的舵机驱动板自带上位机,拥有形象界面,因此可以好好利用。不过,我还是对INI文件做了一些修改,使得控制模块中不再使用表示PWM值的“大”或“小”字眼,而是改成“上下左右”这样直观的描述舵机运动方向的词,使控制更加形象化,使用更方便。比如:   这是最形象的控制方法,遵循上位机本身的初衷,达到轻松使用的目的。 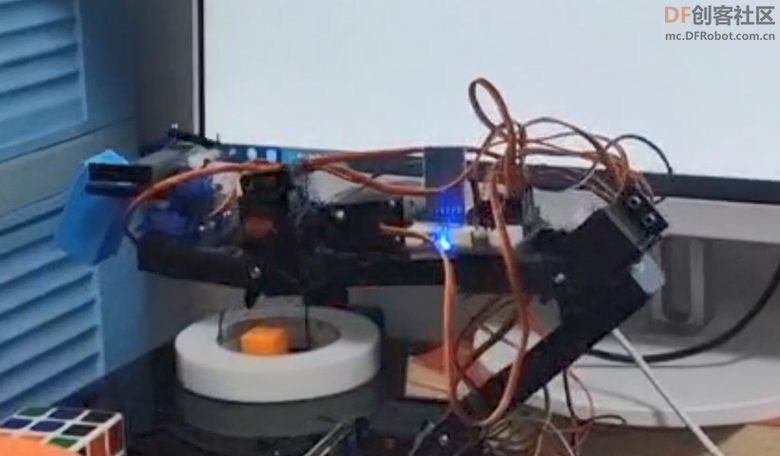 好了,我的分享就到这里,欢迎提出宝贵意见。如果感兴趣,也可以自己造一台,体验造物的乐趣! |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







