|
6389| 3
|
[项目] 教你用arduino造一台宠物机器人! |

|
本帖最后由 小津子 于 2024-1-27 14:46 编辑 现如今,越来越多宠物进入了我们的生活,给我们带来了很多快乐。我一直向往拥有一只属于自己的宠物,可惜母亲不允许。没办法,我只好自己造一个。于是,就有了后面的故事······ 其实,现在的市面上就有很多功能各异的机器人宠物,比如Loona,Moxie 等。 我参照了现有的一些产品,设计并制作了这台机器宠物。 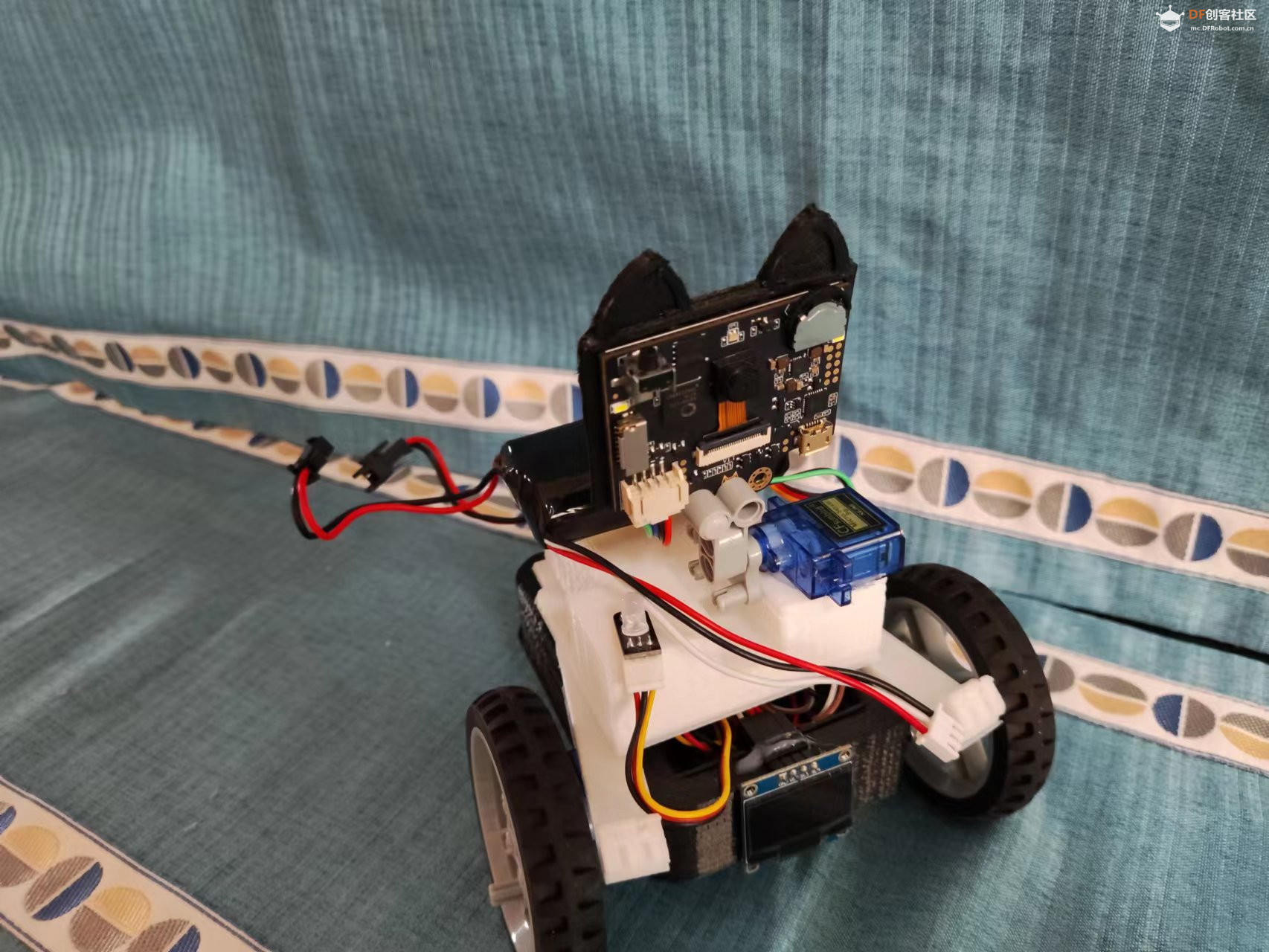 这台机器人名叫“心心”,他可以实现几个基本功能。它会识别主人的手势并作出反应,可以进行玩具学习、跟踪、迎接主人、唱歌跳舞等功能,还能通过判断视野是否被手指遮挡,以此来感受抚摸。当没有识别到任何手势时,“心心”能在桌面上随机运动陪伴主人,煞是可爱! 接下来介绍它的制作过程。 1.设计3D模型。下列图片分别是它的底座、上盖、万向轮和“爪子”: 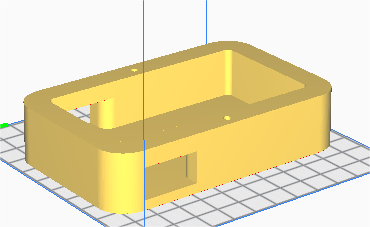 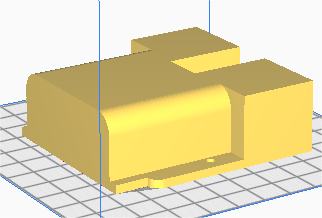  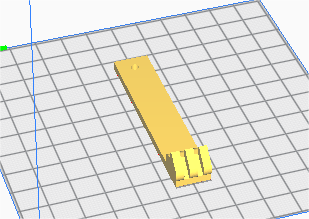 2.3D打印。图为打印出来的部分零件:   3.快乐的组装环节~~~ 所需材料: (1)3D打印组件,包括底座、上盖、爪子、万向轮、摄像头外壳等 (2)360度舵机*3 (3)小轮子*2 (4)连接件若干 (5)Arduino nano*1 (6)Huskylens视觉识别摄像头*1 (7)OLED、蜂鸣器、LED小灯模块、电池*1 (8)连接线若干 (9)m3螺丝若干 硬件组装步骤: (1)把两个360度舵机分别卡进基座旁的卡槽,用螺丝加以固定,并安上轮子。 360度舵机和普通舵机不同,他们没有旋转角度的限制,可以连续旋转,并可以控制旋转速度,但不能控制旋转角度! (2)在基座底部安装万向轮。 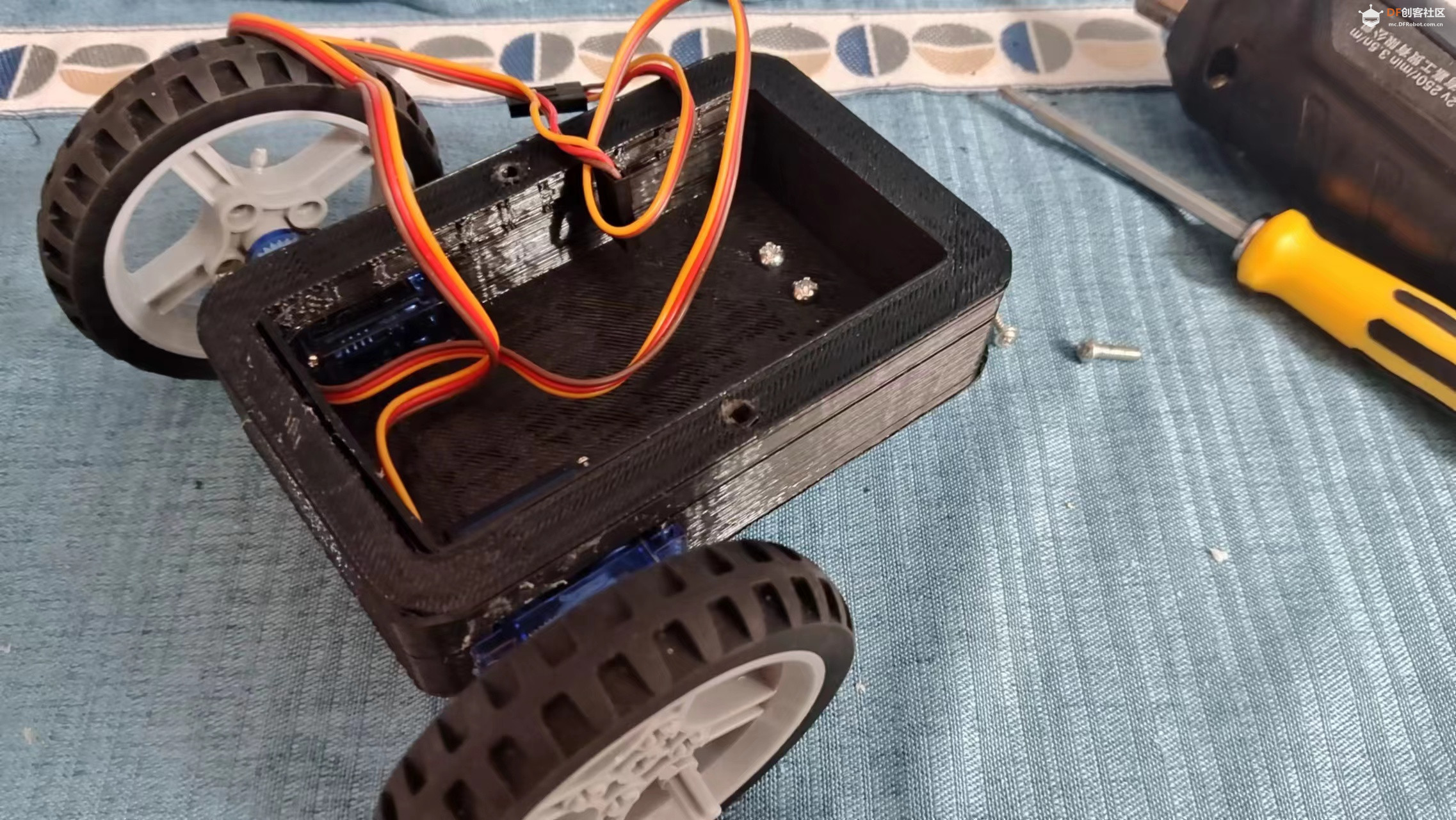 (3)组装电路,以便后续组装上盖。这台机器人的主板是arduino nano,它体积小巧,正好可以装进基座中。arduinonano的12c接口分别接到Huskylens视觉识别摄像头和OLED显示屏。数字2、5引脚接到两个控制轮子的360度舵机,数字4引脚接到控制Huskylens视觉识别摄像头俯仰角度的舵机上,数字8、10脚分别接到蜂鸣器和小灯。接完线后,把电路塞进基座中。 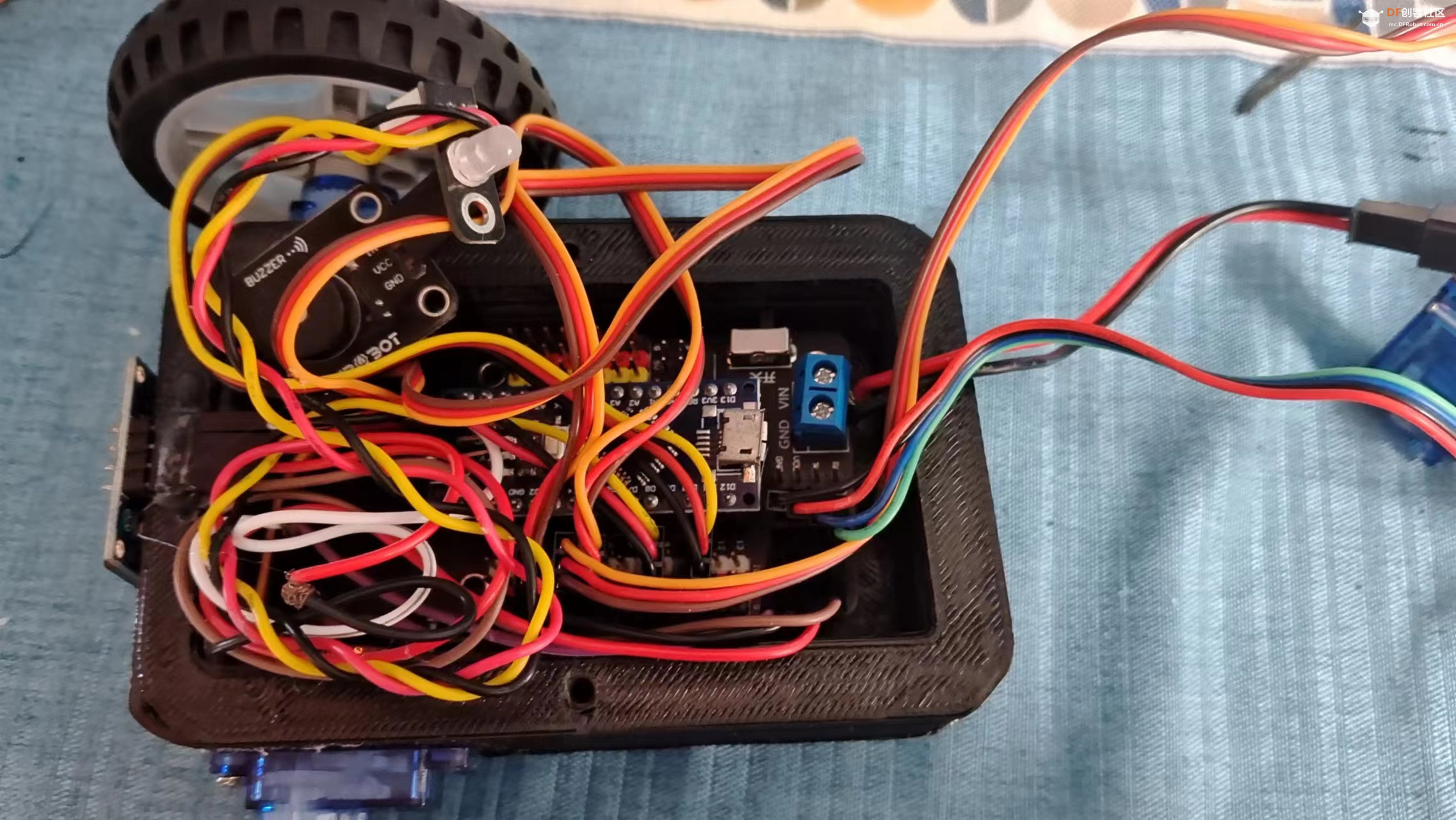 (4)OLED显示屏固定到基座前方。 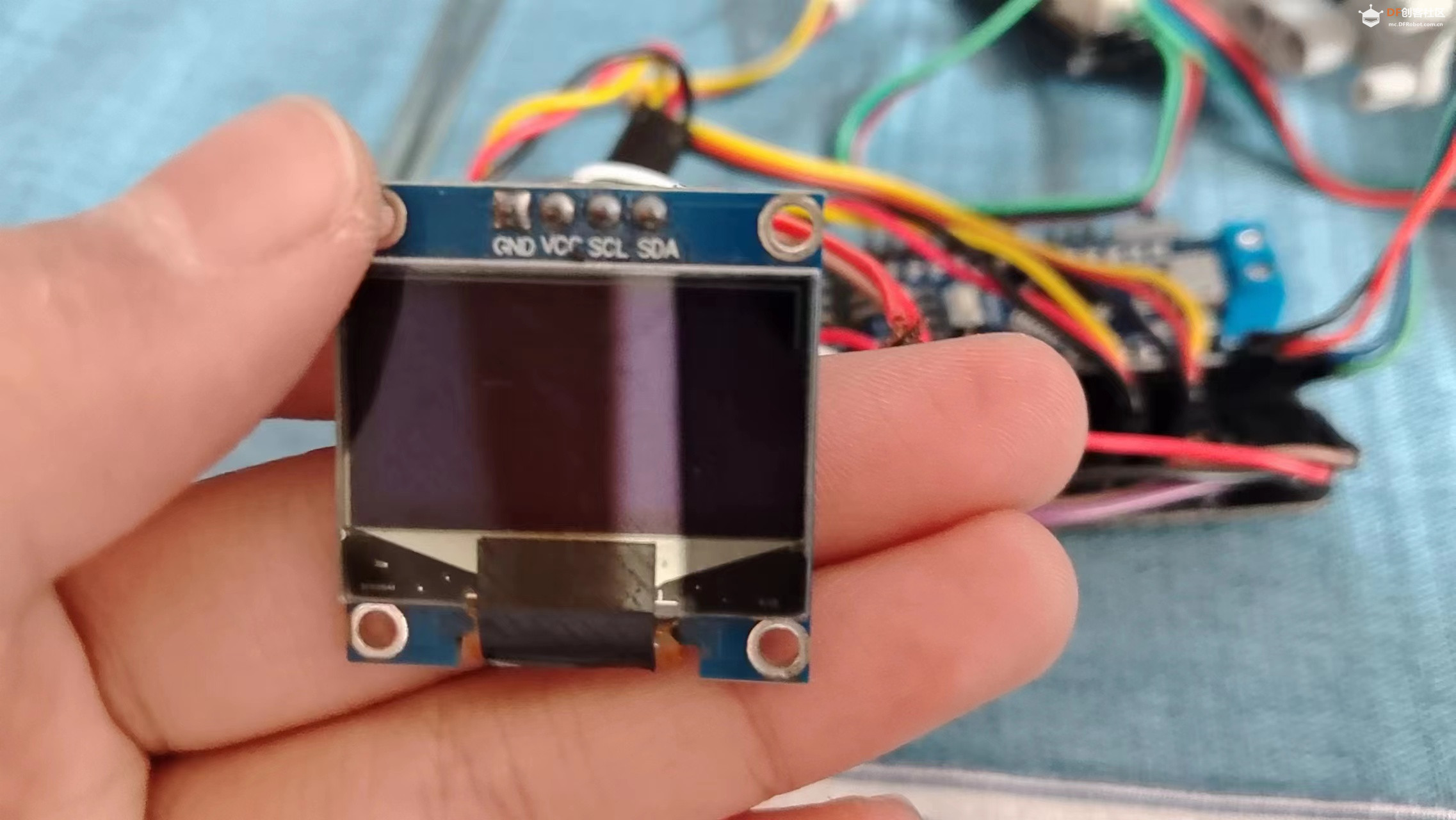 (6)把上盖和爪子一起固定到基座上。注意,螺丝孔一定要对齐。 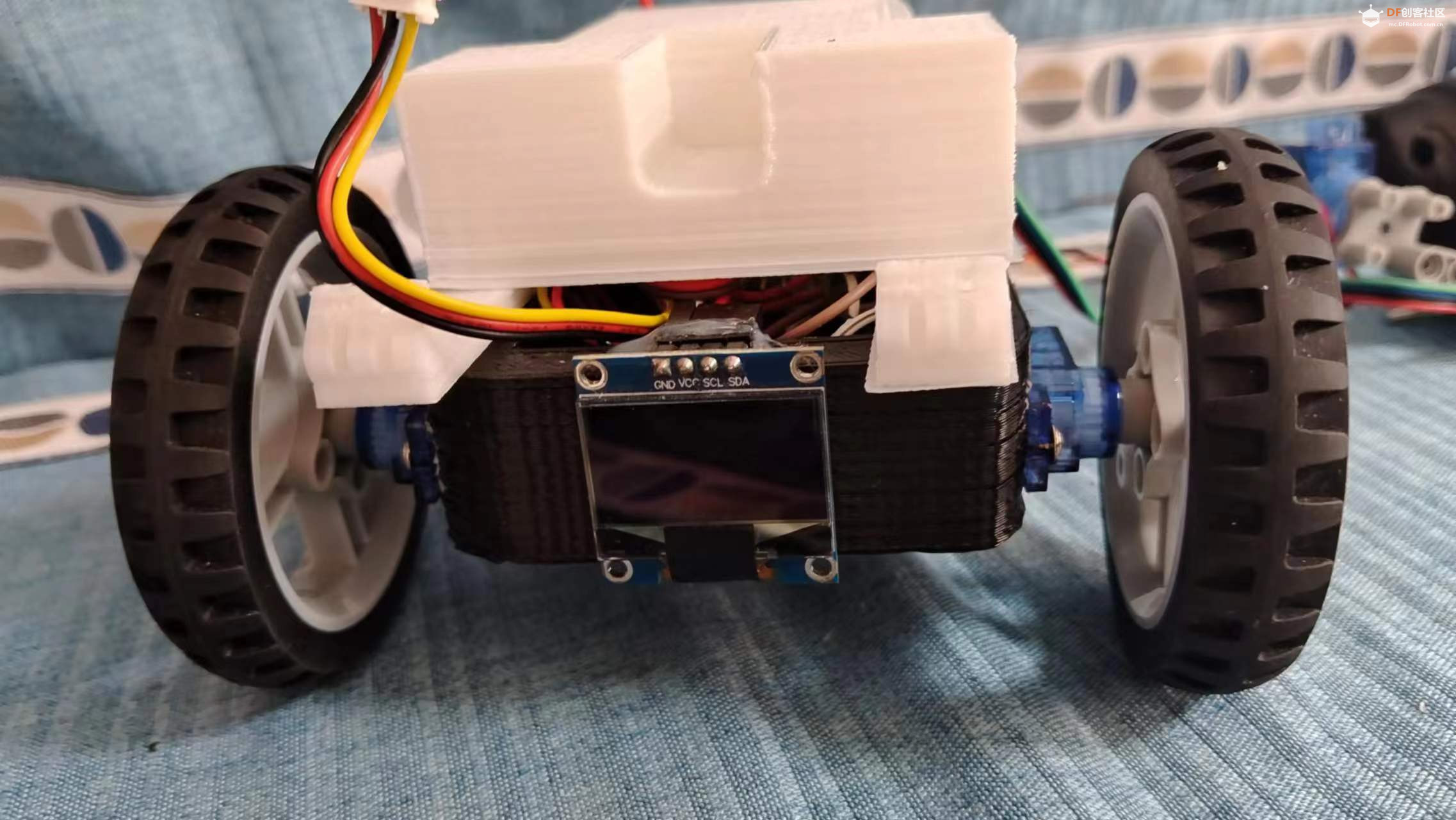 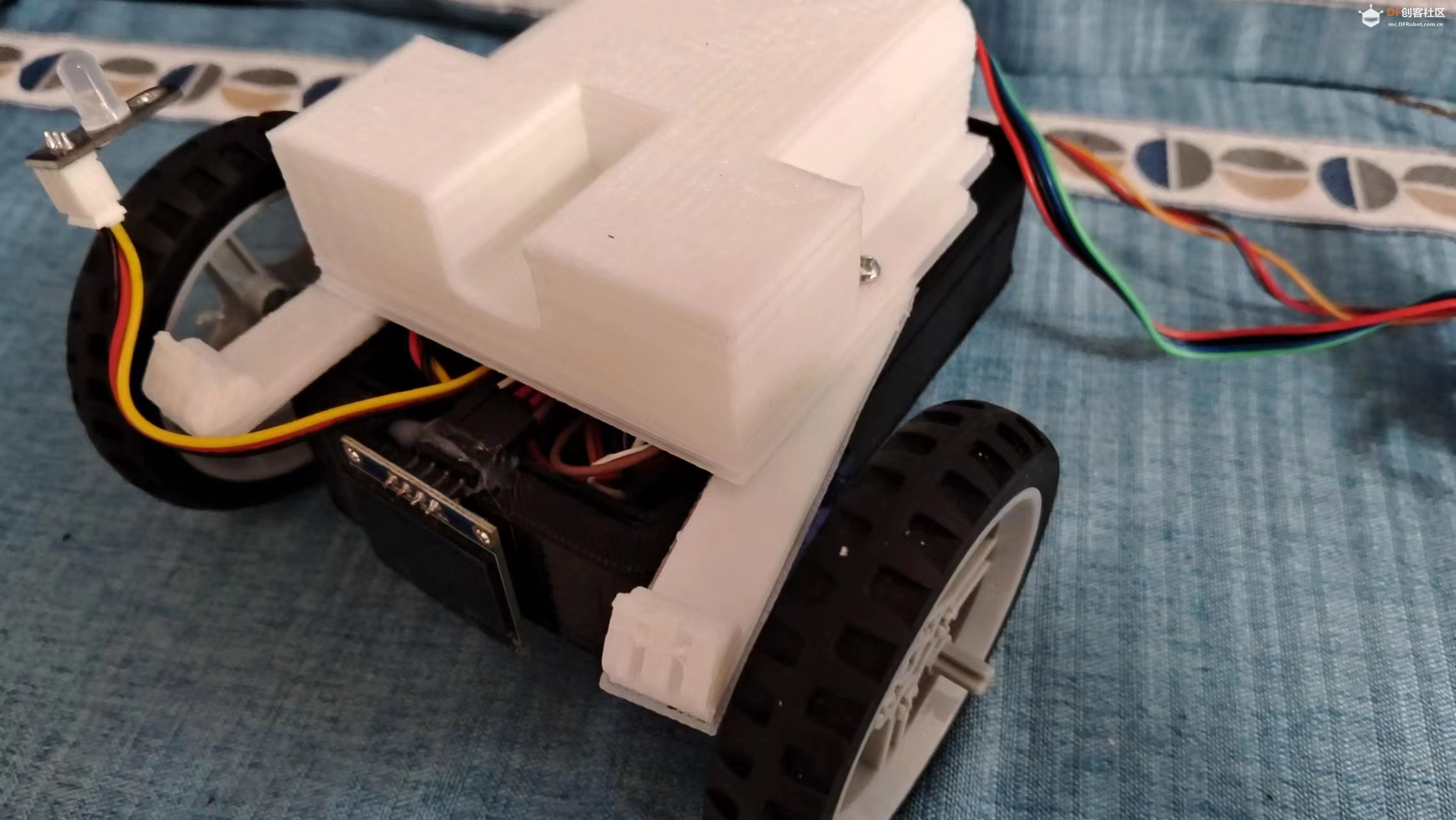 (7)Huskylens视觉识别摄像头套上呆萌的外壳,并固定在第三个360度舵机的舵盘上,组装到上盖的凹槽边,以控制视觉识别摄像头的俯仰角度。 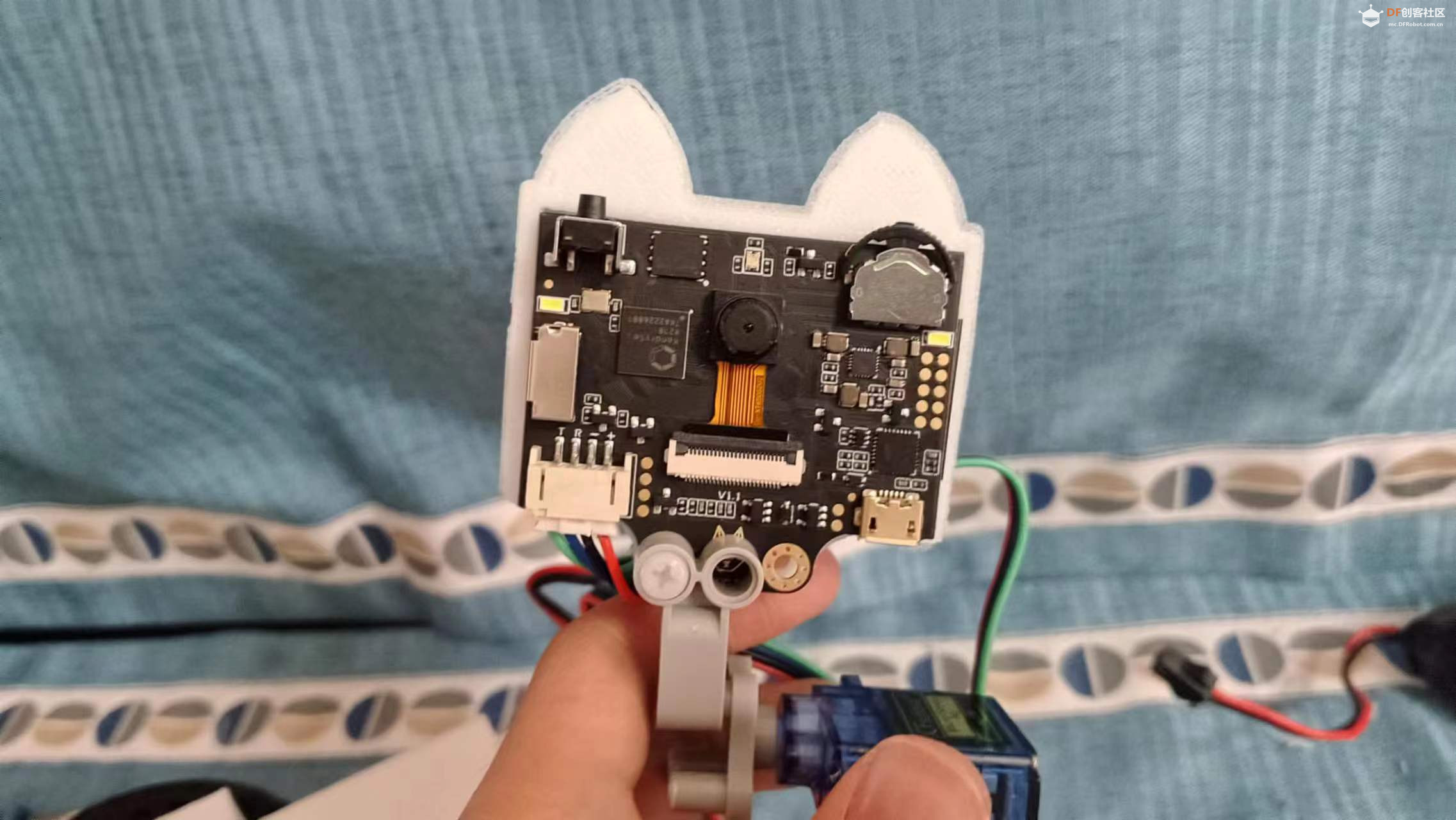 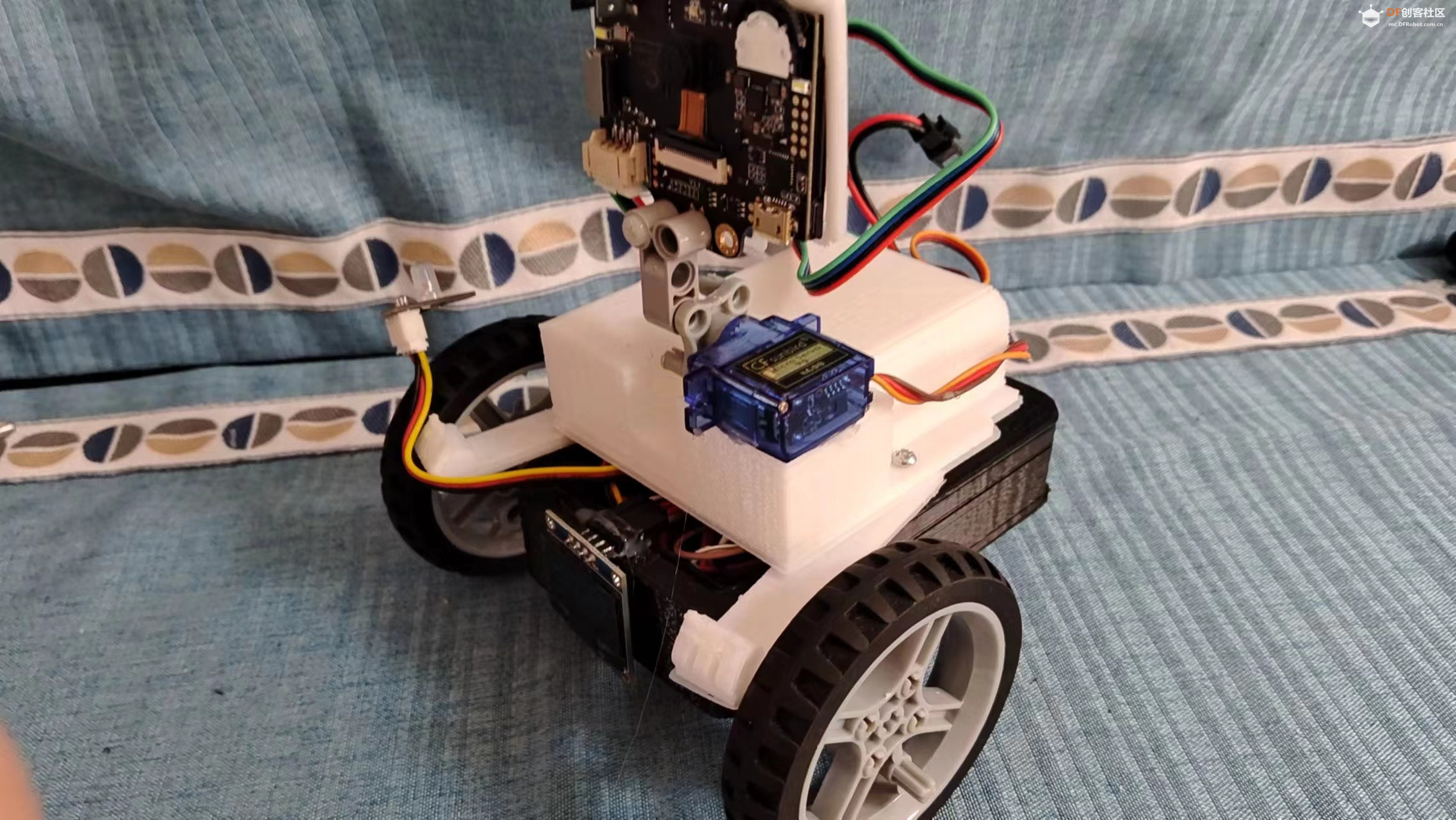 (8)固定小灯。硬件部分组装完成! 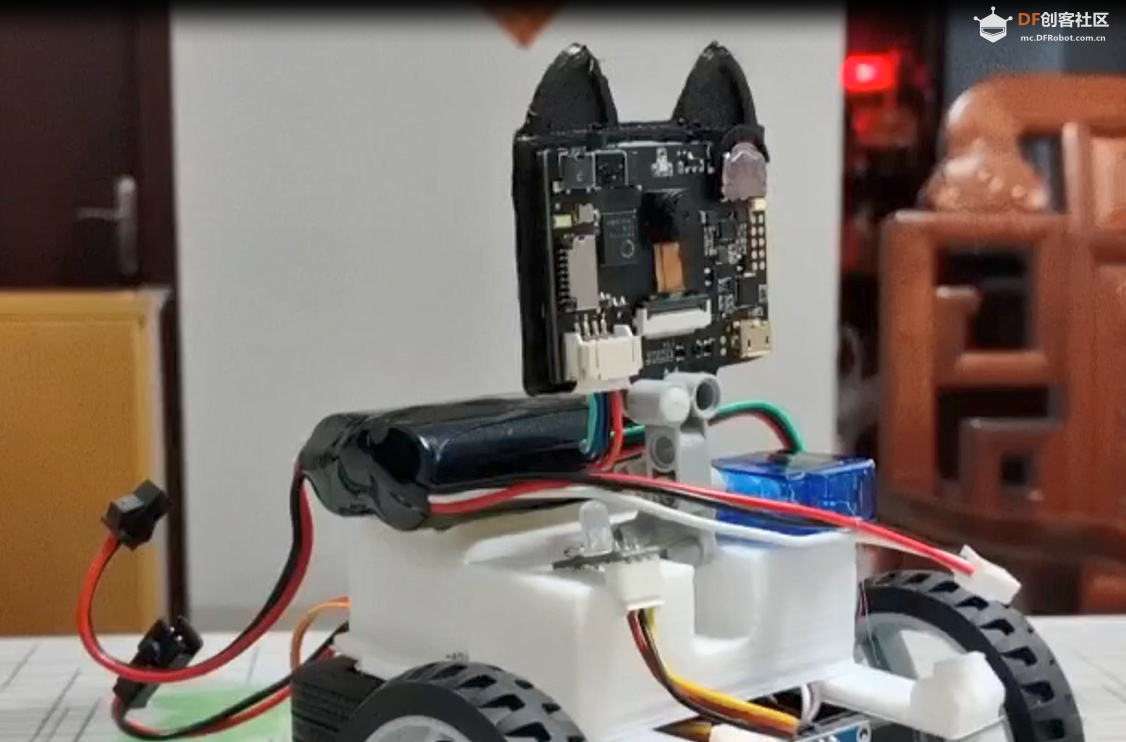 4.编程。我采用的编程软件是mind+。程序使arduino nano能够根据Huskylens视觉识别摄像头返回的信息判断主人的手势或状态,进而进行相应的行为。这里用到了摄像头的物体分类算法和物体跟踪算法。OLED显示屏还能够显示可爱的表情,让机器人拥有简单的情感,更加栩栩如生。值得一提的是,机器人还可以实现唱歌跳舞的功能。它能自动生成一段音乐并随着节奏舞蹈,使得音乐旋律、节奏多变,避免播放的音乐重复、单调等现象,更好地陪伴主人,起到机器人宠物的效果。 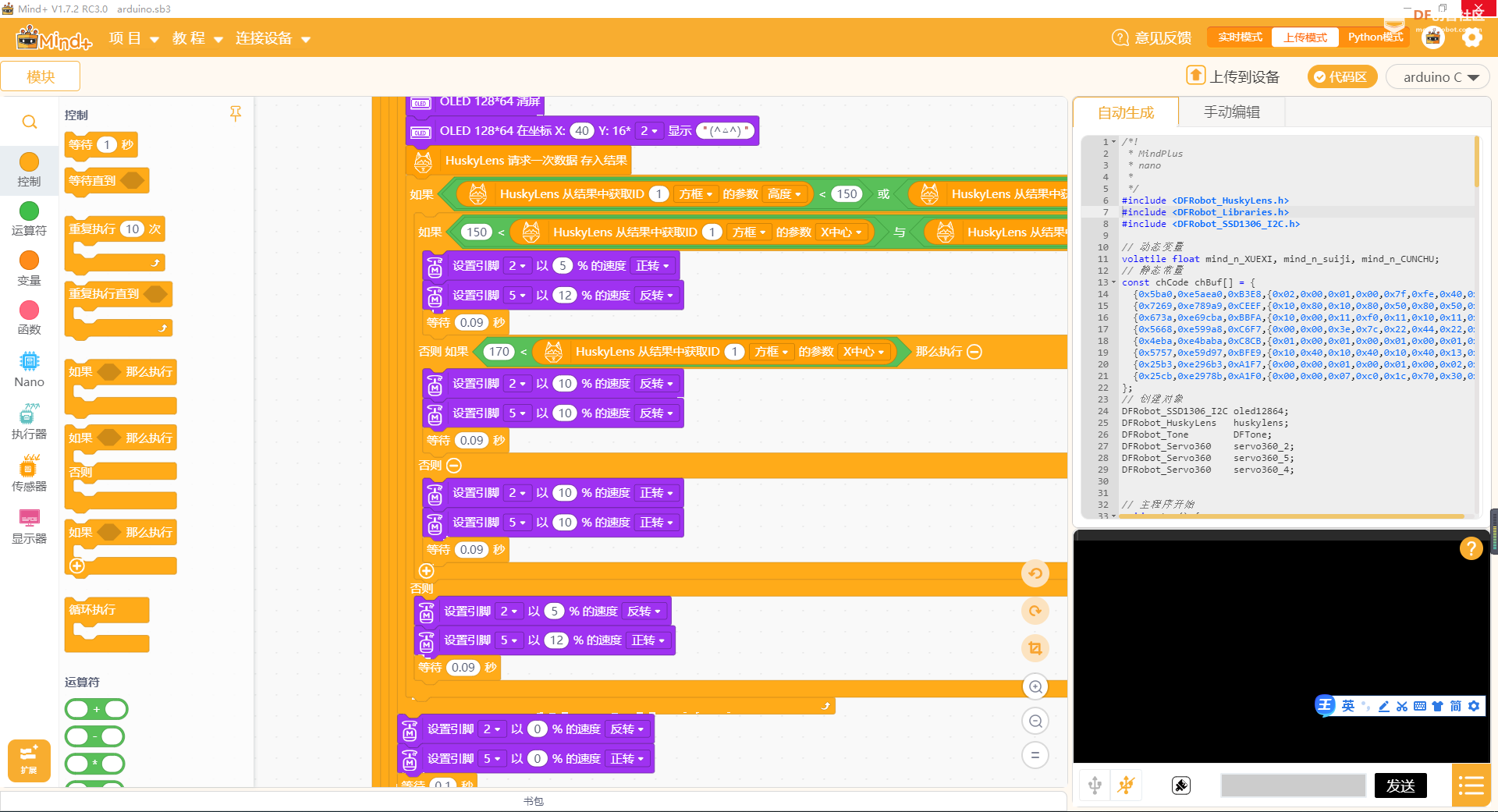 5.Huskylens视觉识别摄像头学习手势。 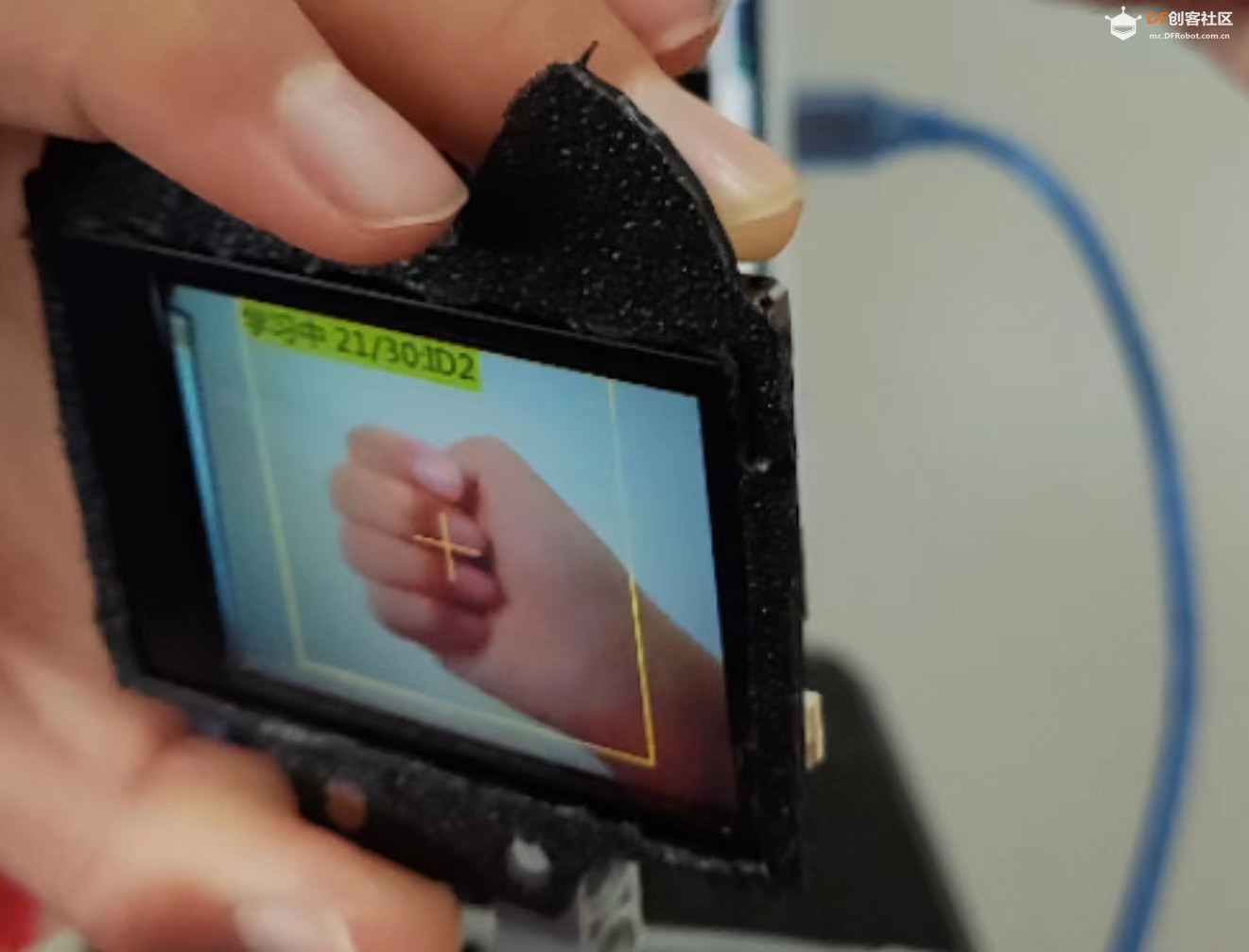 6.机器人宠物大功告成!看看他的运行效果吧! 这台机器人还算是我比较满意的作品。希望大家都能用创造为自己的生活带来色彩,加油! 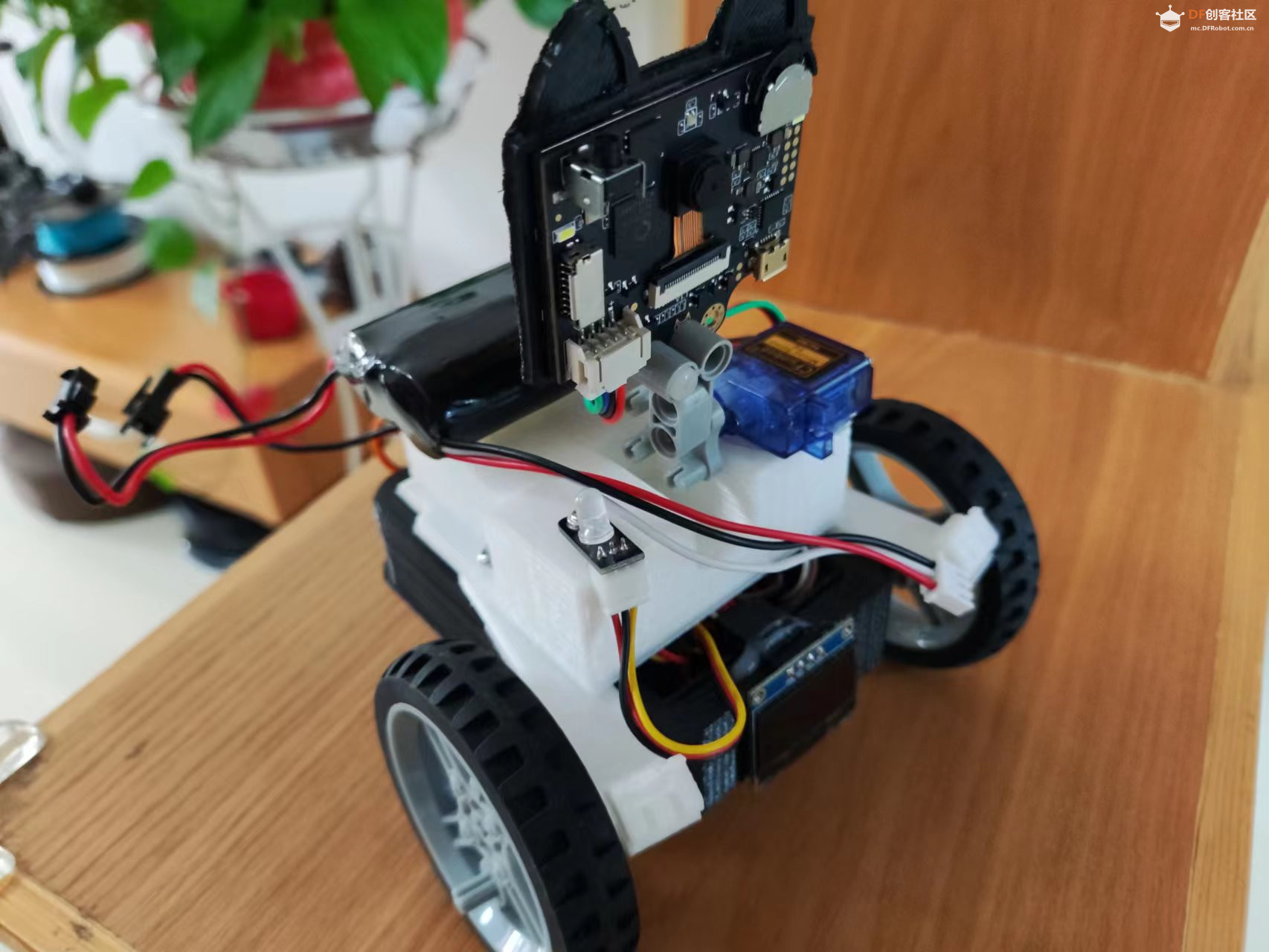 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed



 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶







