|
16376| 9
|
[项目] 春节快乐!来看看我自制的机器人“吉吉” |
|
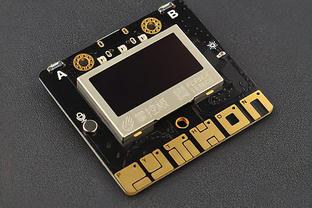
本帖最后由 小津子 于 2023-1-26 13:58 编辑 我是一个热爱机器人的孩子。这台机器人是我用了两个月的时间打造的,是我的第一台机器人,比较简陋,请多指教。 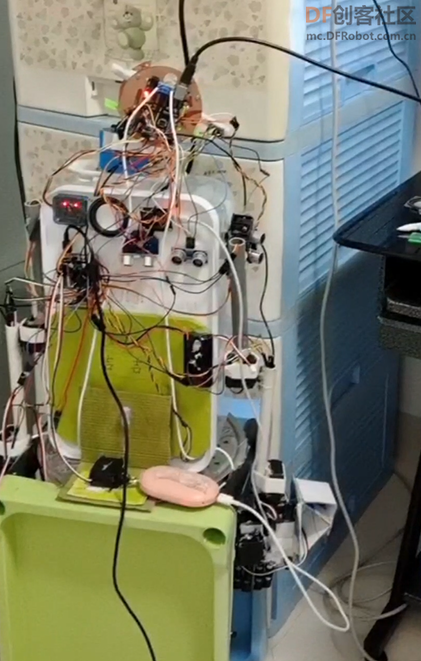 话不多说,上视频! 制作构思:我准备让机器人能够实现以下功能: 1.与我们进行语言交互。 2.可以播放音乐。 3.可以做一些诸如浇花啊,擦桌子啊,握手啊等简单的动作。 制作过程:机器人比较大(当然比我矮一截),需要的材料比较多,我便不一一陈述了。值得一提的是,因为咱家没有什么专业工具,所以这台机器人使用的机械结构的材料都是生活中的常见用品。比如他的身子是个装米的箱子,下半身使用了置物架等等,这是本机器人的一大特色。因为材料常见,所以成本比较低。我想,要是每台机器人都能用最少的成本实现强大的功能,那就棒了(纯属个人意见)。 首先,先组装上半身。米箱两旁各钻一个洞(如图一),安上舵机。此机器人中我使用了两种舵机,一是如图二所示的MG996R舵机,还有S3003舵机。  图一  图二 裁剪塑料水管当手臂。裁成四节,每节20厘米。然后安装舵机和机械手(如图三)。机械手上有一个超静定结构。手腕上是一个xy关节。  图三 安装手臂在机器人身体上。手臂上方也有一个xy关节。 安装头部。头部使用一个小车套件里的两块亚克力板和若干六棱柱制作,支撑它的也是一个超静定结构,以及一个台灯底座。台灯底座所占的面积大,能使其头部更加稳定。 接下来制作下半身。其实就是一个置物架竖过来,上面再加点儿东西,比如鞠躬机构,其实就是个舵机加块纸板,像一个变形的偏心轮机构,没什么技术含量。装饰一下底座,美中不足的是机器人的轮子摩擦力不够,电机扭力太小,走不了。 机械部分做好了,该搭建电子部分了。机器人的主板是Arduino,以及一块众灵科技的二十四路舵机控制板(如图四),他们俩之间使用串口发送指令。比如#001P1500T1000,就是让1号舵机用1秒的时间转到原点。 把arduino与舵机控制板连接,而后连接ASRPRO语音识别及和成模块(注意要连接扬声器,如图五)。机器人还需要三个超声波传感器(如图六)和两个碰撞传感器。碰撞传感器安在手上,无非就是两个开关,开关两级分别接arduino的5V和模拟引脚,开关按下,该引脚应该会读到1023的数值。这个值需要经过换算,公式是:待测信号=Value值/1023x参考电压(5V),此处Value值指测量结果值,待测信号指接线的数值(参考文献1)。 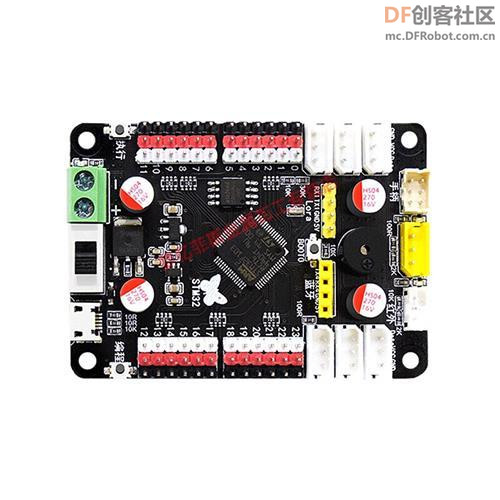 图四 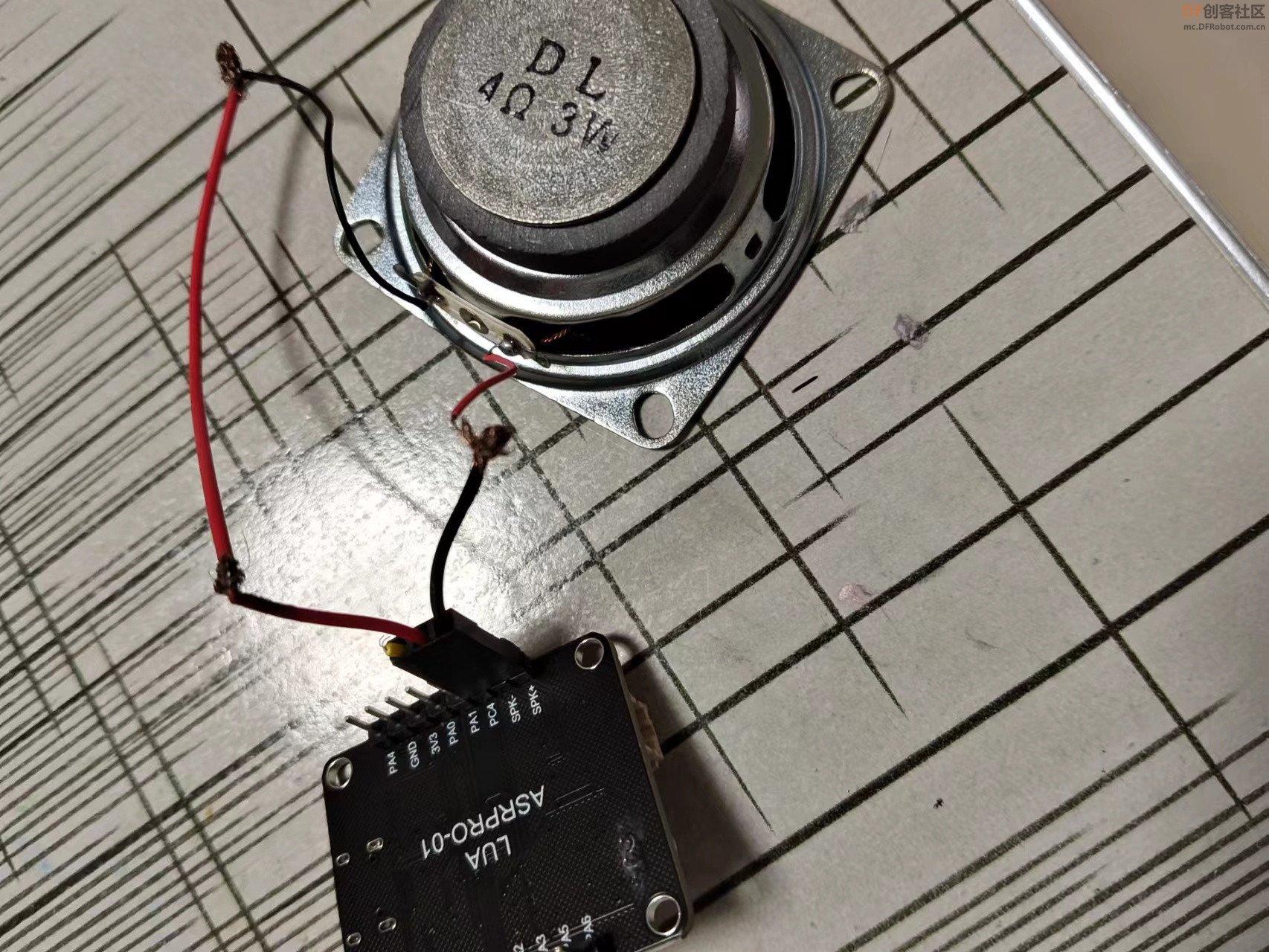 图五  图六 有没有觉得还少了些什么?哦  !视觉识别!我用的视觉识别系统是sentry1,它功能强大,支持多种算法及软件,我用的是卡片识别,把交通卡片贴在待测物体上或用于认证。sentry1可以接串口与arduino进行通信,但tx和rx已经被ASRPRO和众灵科技的二十四路舵机控制板占得满满当当了,幸亏sentry还支持12C通信,接SDA和SCL就可以了(如图七,参考文献2)! !视觉识别!我用的视觉识别系统是sentry1,它功能强大,支持多种算法及软件,我用的是卡片识别,把交通卡片贴在待测物体上或用于认证。sentry1可以接串口与arduino进行通信,但tx和rx已经被ASRPRO和众灵科技的二十四路舵机控制板占得满满当当了,幸亏sentry还支持12C通信,接SDA和SCL就可以了(如图七,参考文献2)!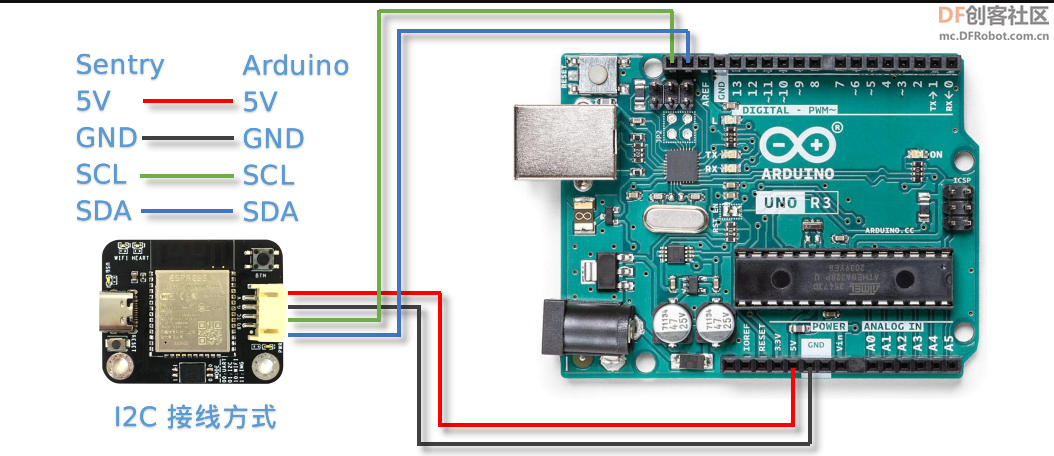 图七(来源:瞳芯智能文档中心) 最后是程序部分。这台机器人程序量比较大,我使用图形化软件进行编程,但我每天的电脑时间有限,所以程序部分花了我将近一个月的时间。 这是arduino的部分程序。 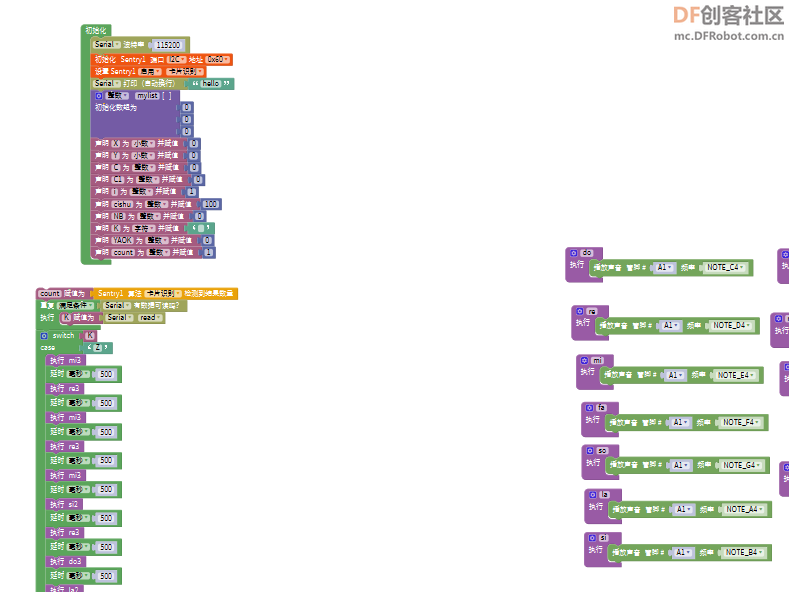 这是ASRPRO的所有程序。 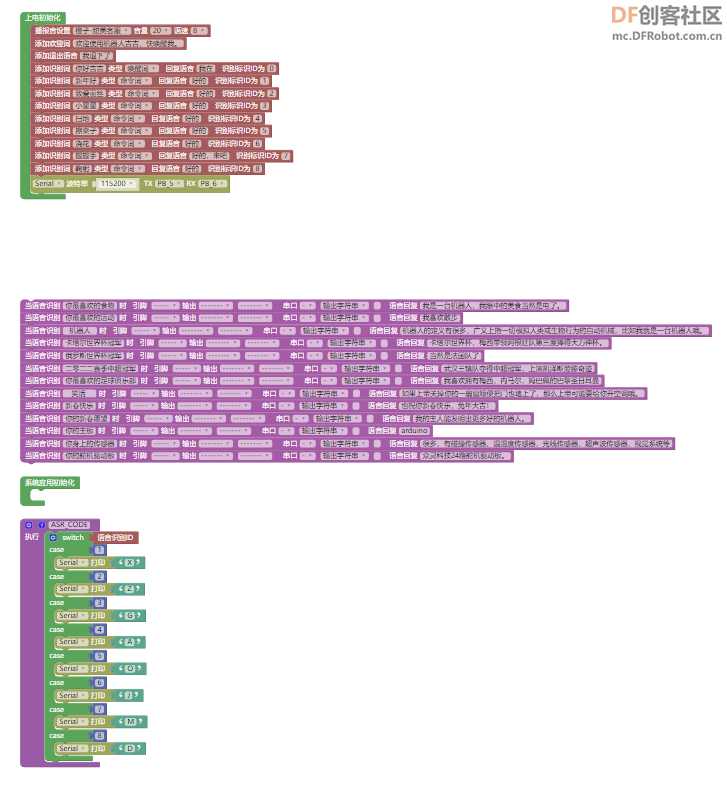 当机器人成功运行程序的那一刹那,我高兴地喊了出来。努力没有白费啊! 大家也看到了,这台机器人有好多功能。 1.语音交互(如图八)。 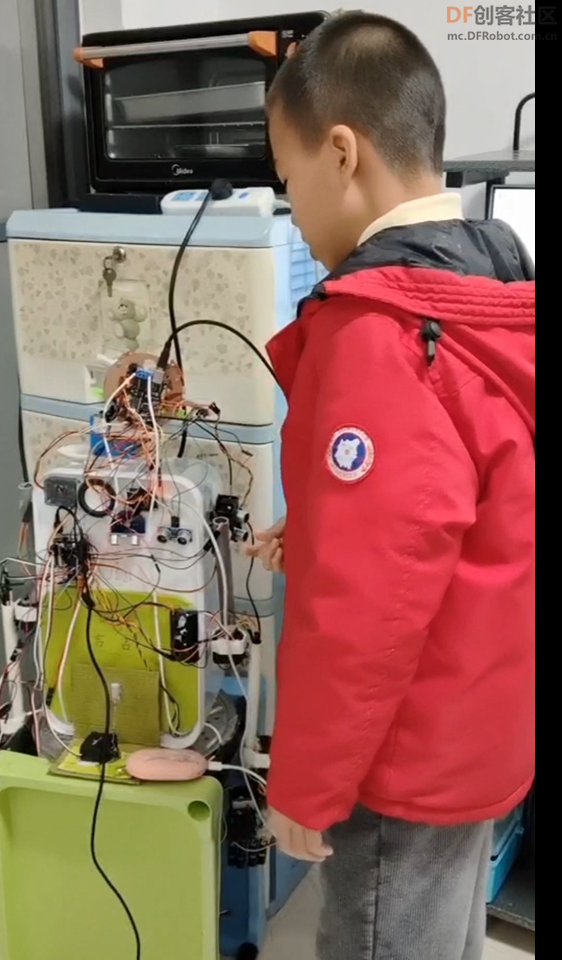 图八 2.放音乐(如图九)。 图九 3.握手(如图十)。 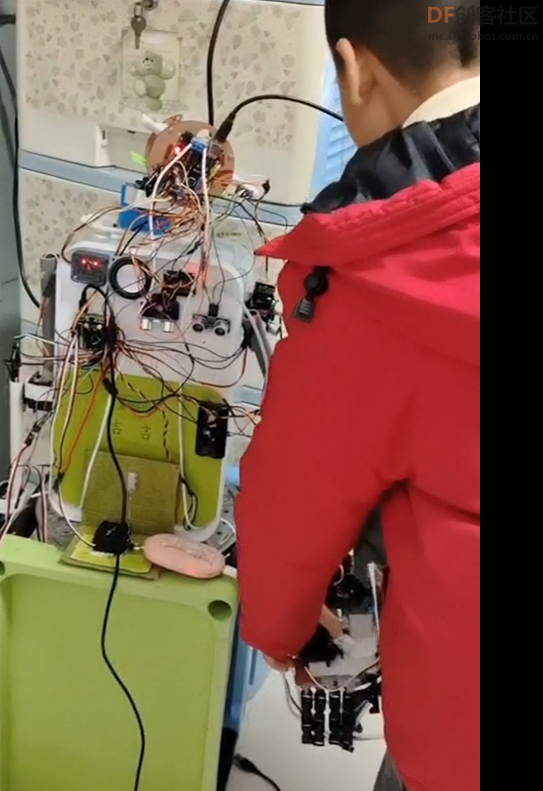 图十 4.做家务(如图十一)。  图十一 当然,它还有很大的进步空间,请多多指教,加油! 参考文献: 1.《Arduino基础与运用》,黄明吉 陈平·编著 2.瞳芯智能文档中心 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶