|
3303| 0
|
[已解决] PWM舵机产品特性 |
|
控制逻辑 PWM控制技术以其控制简单,灵活和动态响应好的优点而成为电力电子技术最广泛应用的控 制方式, PWM控制技术就是对脉冲的宽度进行调制的技术, 即通过对一系列脉冲的宽度进行调制,来等效的获得所需要的波形(含形状和幅值)。 电路简图(Electrical Schematic Diagram): 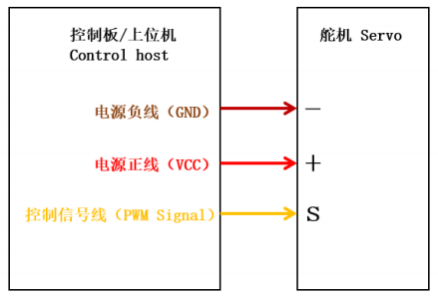 控制信号参数(Control signal parameter): 信号周期(Signal Period): 20000us 脉冲宽度(Pulse Width): 500μs-2500μs 信号高电平电压(Signal high voltage): 3V-3.3V 低电平电压(Signallow voltage): 0.0V-0.45V  控制信号图 PWM舵机控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms-2.5ms,范围内的角度控制脉冲部分,总间隔为2ms,角度控制关系如图2.5所示。 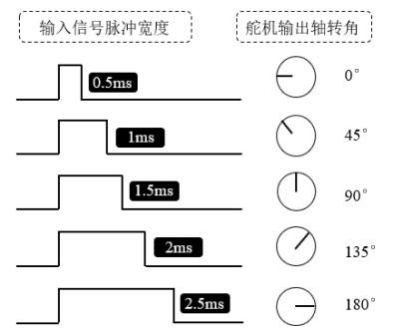 角度控制关系图 接线步骤 1 、舵机接口 1 连接至蓝色调试板 A 位置(根据电路简图注意区分引脚及正负极),若有多个舵机可依次连接 A 位置其他插口; 2 、接口 2 连接至蓝色调试板 B 位置,如图 a 所示; 3 、将 USB- 串口转接线上的 TTL/485 端调至 TTL 端并连接 PC 端电脑(内置 PWM 和 TTL 两 种协议的 PWM 舵机转接线会自动识别 PWM 协议后通讯, 否则请用专门的 PWM 测试架进行舵机调试, 调试板不能由电脑和电源同时供电,注意接通电源前将接口 2 的红色电源线拔出); 4 、电源口接通电源后打开 Servo Control V1.0.0.3 舵机测试平台,如图 b 所示。 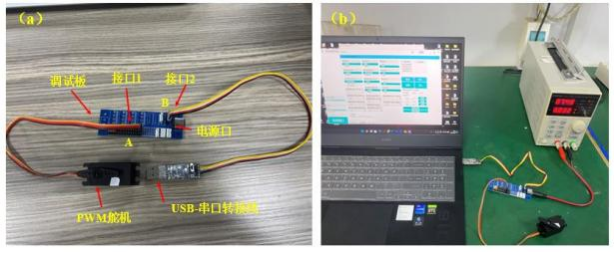 操作步骤 1、接线完成后打开德晟 Servo Control V1.0.0.3 舵机测试平台。  在端口列表选择舵机对应窗口,设置波特率(在其他波特率值中输入产品目标波特率,默认值为 115200),点击打开端口进行参数设置对舵机进行控制。  3 、打开端口后点击读取,当显示读取成功后可以查看当前舵机参数, 若显示读写失败请检 查接线步骤是否正确或端口列表是否选择正确,若要查看不同舵机当前参数,选择不同舵机对应的端口列表后重新读取。   4 、根据舵机产品特性设置舵机其他参数,参数设置完成后点击写入, 显示写入成功则代表参数设置成功,显示读写失败则代表参数设置失败。 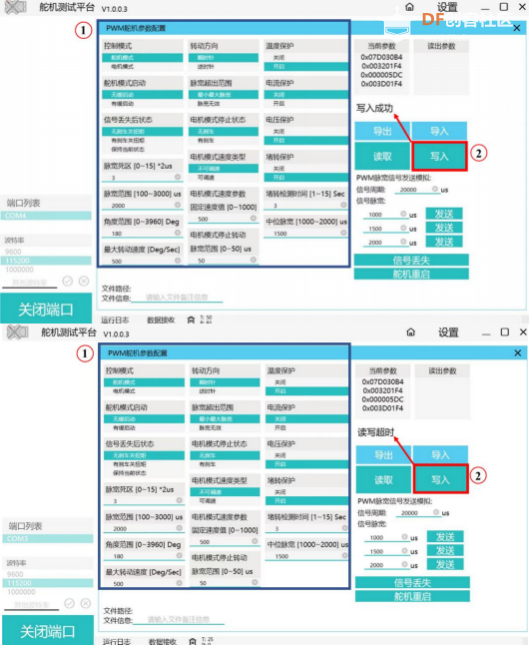 5 、参数设置完成后点击舵机重启,根据 PWM 信号参数设置信号周期(默认为 20000us), 调整信号脉宽点击发送即可控制舵机进行角度位置调整。以 180°角度伺服舵机为例, 当PWM 信 号脉宽由 1500us 变到 500us 时,舵机从 90°位置逆时针转动 90°的角度,当 PWM由 1500us变到 2500us 时,舵机从 90°的位置顺时针转动 90°的角度。等待全部测试完成后点击关闭端口。  常见故障 不良现象
常见问题 问 1:舵机固定在产品上,用外壳定位偏差很大? 答 1:舵机装配以输出齿圆心为中心定位,尽量用两边耳朵孔作固定。 问 2:舵机塑胶齿轮不耐冲击,容易蹦齿? 答 2:需考虑离合齿的舵机来应用,避免产品外部冲击大于堵转扭矩使蹦齿。 问 3:舵机输出齿承受外部冲击导致损坏,输出齿不够强? 答 3:尽量用舵盘及产品结构件支撑来承受外部冲击,避免细小的输出齿承受其大于舵机堵转扭矩的冲击力。 注意事项 1 、请在工作电压和电流范围内使用,切勿超压或过流,以免舵机烧坏或内部损坏。 2、接线前请严格按照接线步骤操作,以免舵机无功能或者无法正常工作。 3、大扭矩舵机使用时务必小心谨慎,防止误操作造****身伤害。 4、切记不要在舵机工作状态下再向总线上增加新舵机。 5、本产品为高精度产品,请勿人为大力转动舵盘或摆臂,以免产品内部损坏。 6 、PWM 舵机安装前先通电确认回中后再安装舵盘,以免安装后舵机角度位置不对。 7 、切勿在超高负荷状态下运转舵机,尽量选择合适运行转矩。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






