|
4085| 0
|
一文概叙自制舵机云台 |
|
本文主要涉及选择合适的舵机、设计云台结构、编写控制代码以及组装调试等步骤。以下是一个详细的制作流程: 一、材料准备 1、舵机: 通常需要至少两个舵机,一个用于控制云台的左右旋转,另一个用于控制云台的上下倾斜。先以简单的PWM舵机为例:DS-S006M九克铜齿舵机(有条件的也可以上总线舵机,配合高精度磁编码传感器,可以做闭环控制,角度微调,精准度也更高)。  ([size=14.6667px]DS-S006M[size=14.6667px]九克铜齿舵机) ([size=14.6667px]DS-S006M[size=14.6667px]九克铜齿舵机)注意舵机的扭矩和速度,以确保能够满足云台的运动需求。 舵机选择: ①扭矩:确保所选舵机的扭矩足够大,以支持云台及其负载(如摄像头)的重量。 ②速度:虽然速度不是决定性因素,但较快的响应速度可以提供更流畅的控制体验。 ③精度:如果可能,选择带有高精度磁编码器的舵机,以提高角度控制的准确性。 2、控制板: 可以使用Arduino、ESP32等微控制器作为控制板,它们具有丰富的外设接口和强大的控制能力。还需要安装相应的开发环境和库文件,以便编写和上传控制代码。 3、电源: 根据舵机和控制板的功率需求选择合适的电源。对于DS-S006M九克铜齿舵机等小型舵机,通常可以使用5V或6V的直流电源。使用稳压电源,确保电压稳定,避免波动影响舵机和控制板的性能。 4、其他材料: 支架和连接件:用于固定舵机和构建云台结构。 螺丝和螺母:用于固定各个部件。 导线:用于连接舵机和控制板。 二、云台结构设计 1、确定云台尺寸和形状: 根据实际需求设计云台的尺寸和形状,确保能够稳定地支撑摄像头或其他负载。设计时确保云台的重心位于旋转轴的中心附近,以减少振动和不稳定性。必要情况下可以考虑添加配重块来调整重心位置。 2、设计旋转机构: 利用舵机的输出轴和齿轮系统构建旋转机构,实现云台的左右旋转和上下倾斜。 注意设计合理的传动比和齿轮间隙,以确保运动的平稳性和精度。建议使用齿轮、轴承或滑轨等机械元件来优化传动效率和减少摩擦。设计时考虑传动比的调整,以便在速度和扭矩之间找到最佳平衡点。 3、固定支架: 设计并制作固定支架,将舵机固定在云台上,并确保各个部件之间的连接牢固可靠。 材料选择上,使用轻质但坚固的材料,如铝合金或碳纤维,以减轻重量并增强稳定性。 可以使用3D打印部件来快速原型制作和测试不同的设计。 三、编写控制代码 1、初始化舵机: 在代码中初始化舵机,设置其控制引脚和初始角度。 2、编写控制逻辑: 根据实际需求编写控制逻辑,实现云台的左右旋转和上下倾斜功能。 可以使用循环语句和延时函数控制舵机的运动速度和范围。 ①库文件: 利用现有的舵机控制库(如Arduino的Servo库)可以大大简化代码编写过程。 如果使用自定义或特殊类型的舵机,可能需要编写或修改库文件以适应其通信协议和控制方式。 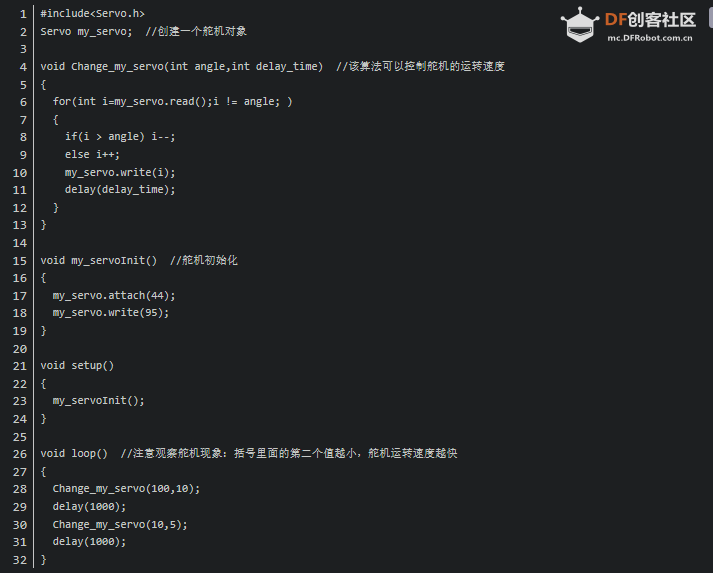 (代码示例) (代码示例)②控制算法: 考虑实现PID(比例-积分-微分)控制算法来优化舵机的位置控制和响应速度。 使用传感器(如陀螺仪或加速度计)来实现更高级的稳定性和防抖功能 3、调试和优化: 在实际测试中不断调试和优化控制代码,以确保云台的稳定性和可靠性。 四、组装调试 1、组装云台: 按照设计好的结构将各个部件组装在一起,确保所有连接都牢固可靠。 连接电源和控制板: 将电源连接到控制板和舵机,确保电路连接正确无误。 2、上传控制代码: 将编写好的控制代码上传到控制板中,并检查是否能够正常运行。 3、测试云台功能: ①在进行实际测试之前,先进行软件模拟或静态测试以验证控制代码的正确性。 ②通过控制板或遥控器测试云台的功能,包括左右旋转和上下倾斜等动作。 ③观察云台的运动是否平稳、精确,并根据需要进行调整和优化。观察并记录云台在运动过程中的任何异常行为(如振动、卡顿或漂移),并进行相应的调整和优化。 通过以上步骤,你就可以使用舵机制作出一个简单的云台了。当然,根据实际需求的不同,你还可以对云台进行进一步的改进和扩展,优化算法和执行逻辑;还有增加功能:比如增加防抖功能、增加更多的舵机以实现更复杂的运动等。祝贺大家都可以制作出一个稳定、可靠且功能丰富的云台系统。了解更多舵机应用知识,关注“德晟舵机”。 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed


 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶






