|
2133| 9
|
[项目] 【花雕学编程】Arduino动手做(233)---ADXL345的俯仰滚动角 |

|
ADXL345是一款由Analog Devices公司推出的三轴数字加速度计,具有高分辨率和低功耗的特点,非常适合移动设备和其他需要精确加速度测量的应用。以下是对ADXL345三轴模块的详细介绍: 1、主要特点 高分辨率:ADXL345能够提供高达13位的分辨率,能够测量高达±16g的加速度1。 低功耗:在测量模式下,功耗低至23 μA,在待机模式下功耗仅为0.1 μA1。 多种测量范围:用户可以选择±2g、±4g、±8g或±16g的测量范围,适应不同的应用需求1。 数字接口:支持SPI(3线或4线)和I2C数字接口,方便与各种微控制器进行通信1。 内置功能:具有活动/非活动检测、单击/双击检测、自由落体检测等多种功能,可以独立映射到两个中断输出引脚1。 2、应用场景 移动设备:用于检测设备的倾斜、运动和冲击。 医疗仪器:用于监测患者的运动状态。 游戏和定点设备:用于检测用户的动作和姿态。 工业仪器仪表:用于监测机器的振动和运动状态。 个人导航设备:用于检测设备的方向和运动。 3、引脚功能 ADXL345模块通常有以下引脚: VCC:电源引脚,连接到2.0V至3.6V的电源。 GND:地引脚。 SDA/SDI/SDIO:数据输入/输出引脚,用于I2C或SPI通信。 SCL/SCLK:时钟引脚,用于I2C或SPI通信。 CS:片选引脚,用于SPI通信。 INT1/INT2:中断引脚,用于输出检测到的事件。 4、使用步骤 连接电源和地:将VCC引脚连接到电源,GND引脚连接到地。 选择通信接口:根据需要选择I2C或SPI接口,并连接相应的引脚。 初始化传感器:在代码中初始化ADXL345传感器,设置测量范围和其他参数。 读取数据:通过I2C或SPI接口读取加速度数据,并进行处理。 ADXL345是一款功能强大且易于使用的三轴加速度计,适用于各种需要精确加速度测量的应用。 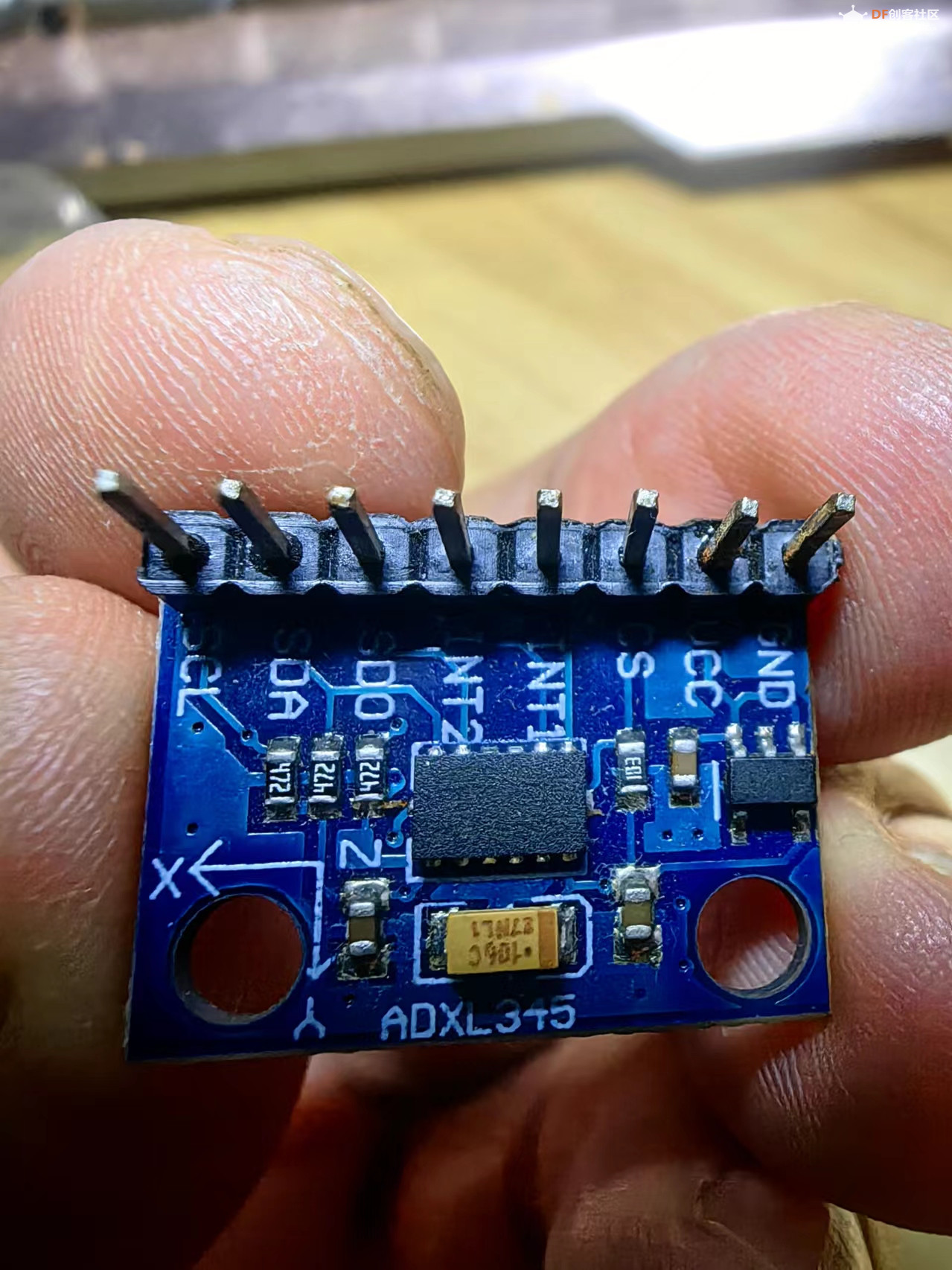 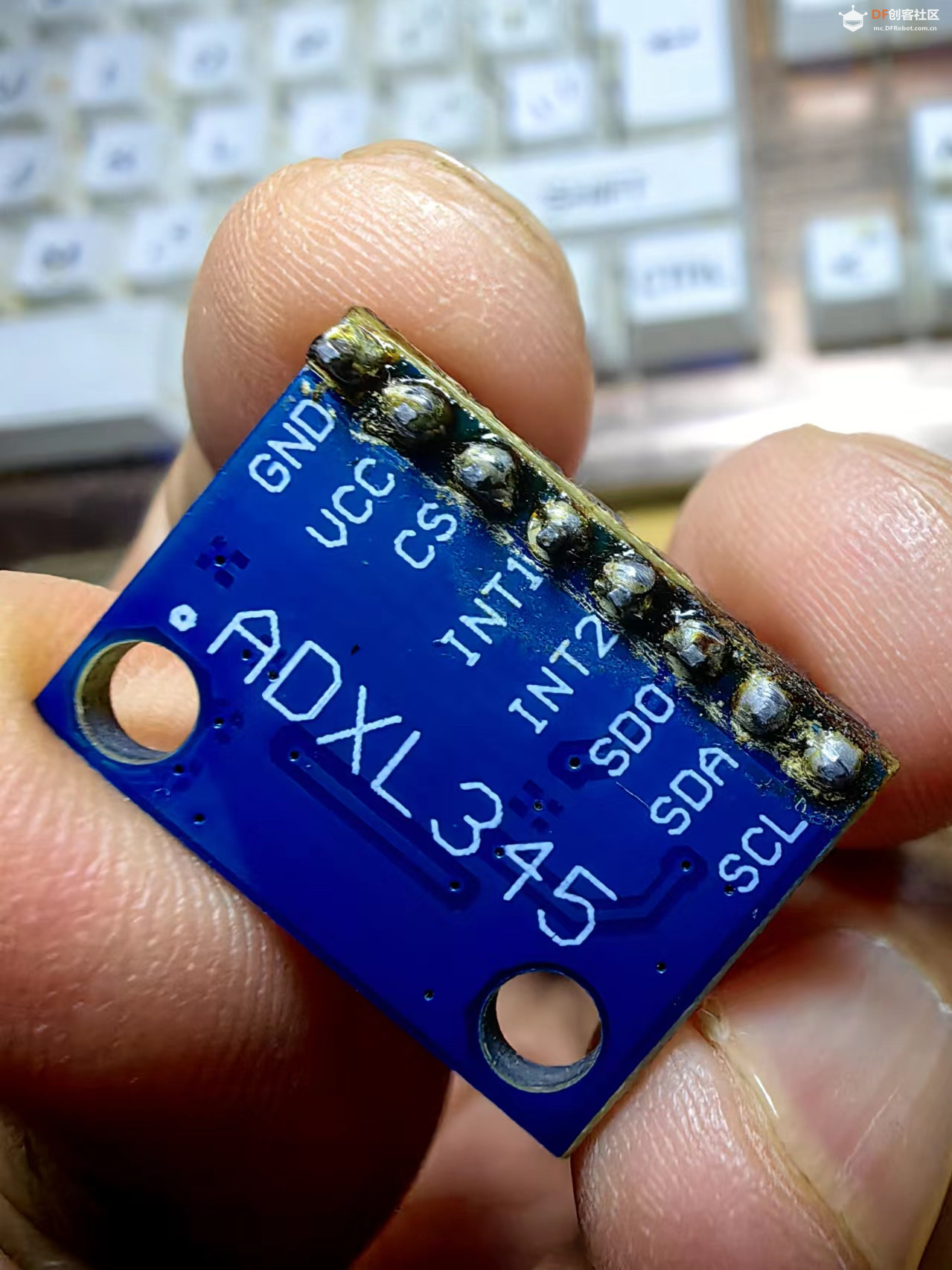 |
|
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程) 实验二百三十三:ESP32-S3 UNO开发板 双核16M+8M+Wi-Fi+蓝牙5.0+45个GPIO {花雕动手做}项目之六:ESP32-S3 UNO(N16R8)驱动ADXL345动态检测俯仰角和滚动角的变化 知识点 1、俯仰角(Pitch) 俯仰角是物体绕其横轴(左右方向的轴)旋转的角度。以下是几个例子: 飞机:当飞机起飞时,机头向上抬起,这时俯仰角为正。如果飞机降落时机头向下,则俯仰角为负。 汽车:在陡坡上行驶时,汽车前端抬起,俯仰角为正;下坡时,汽车前端向下,俯仰角为负。 自平衡小车:当小车前倾时,俯仰角为正;后倾时,俯仰角为负。自平衡小车通过调整俯仰角来保持平衡。 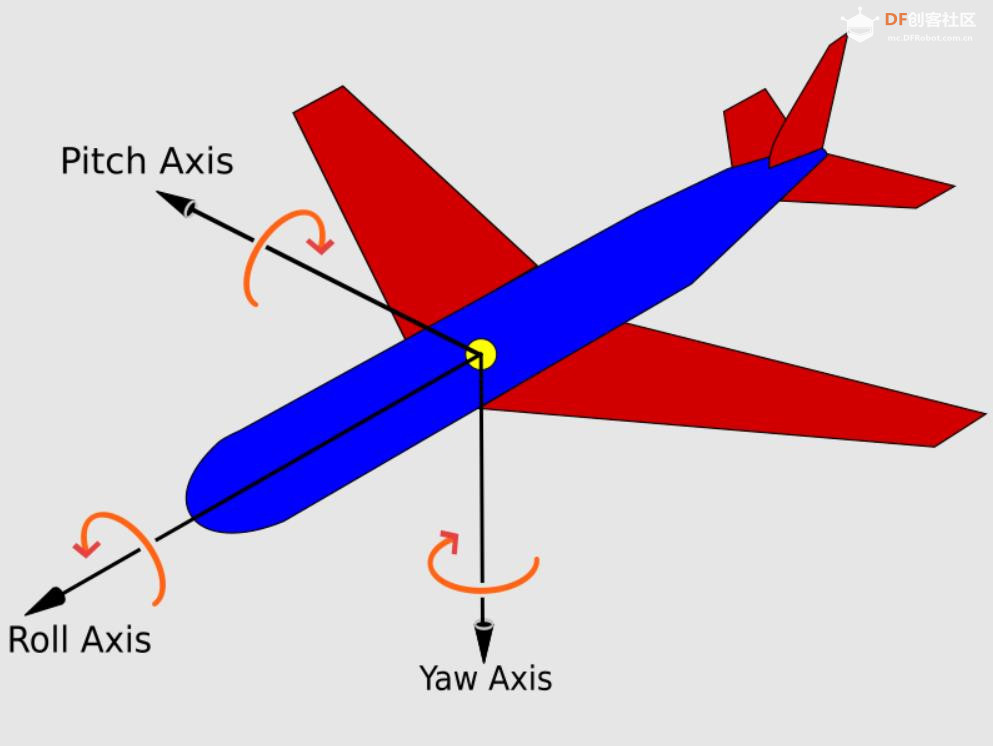 |
|
滚动角(Roll) 滚动角是物体绕其纵轴(前后方向的轴)旋转的角度。以下是几个例子: 飞机:当飞机做滚转动作时,左翼或右翼向上抬起,这时滚动角发生变化。左翼向上时,滚动角为正;右翼向上时,滚动角为负。 船只:在波浪中航行时,船只左右摇摆,这时滚动角不断变化。船只左倾时,滚动角为正;右倾时,滚动角为负。 无人机:无人机在飞行中左右倾斜以改变飞行方向时,滚动角发生变化。无人机左倾时,滚动角为正;右倾时,滚动角为负。 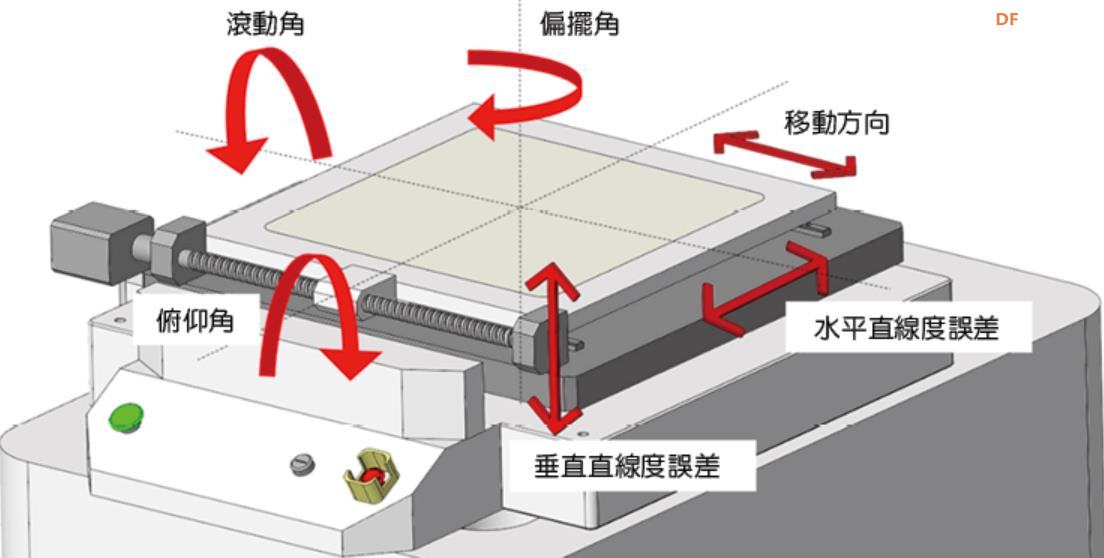 为了更直观地理解,可以想象以下情景: 俯仰角:想象你站在一个跷跷板的中间,当跷跷板的前端抬起时,你的俯仰角为正;当跷跷板的前端向下时,你的俯仰角为负。 滚动角:想象你站在一个旋转的圆筒中,当圆筒向左或向右倾斜时,你的滚动角发生变化。向左倾斜时,滚动角为正;向右倾斜时,滚动角为负。 |
实验开源代码 |
|
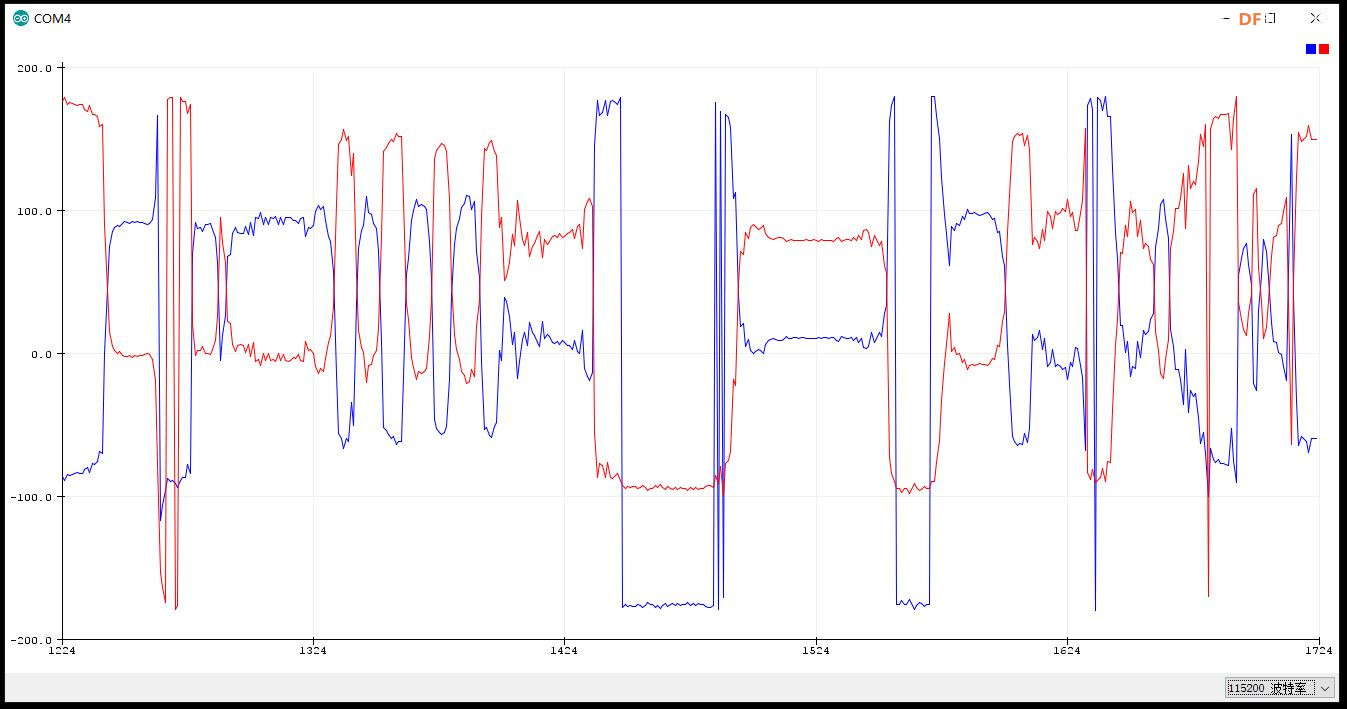
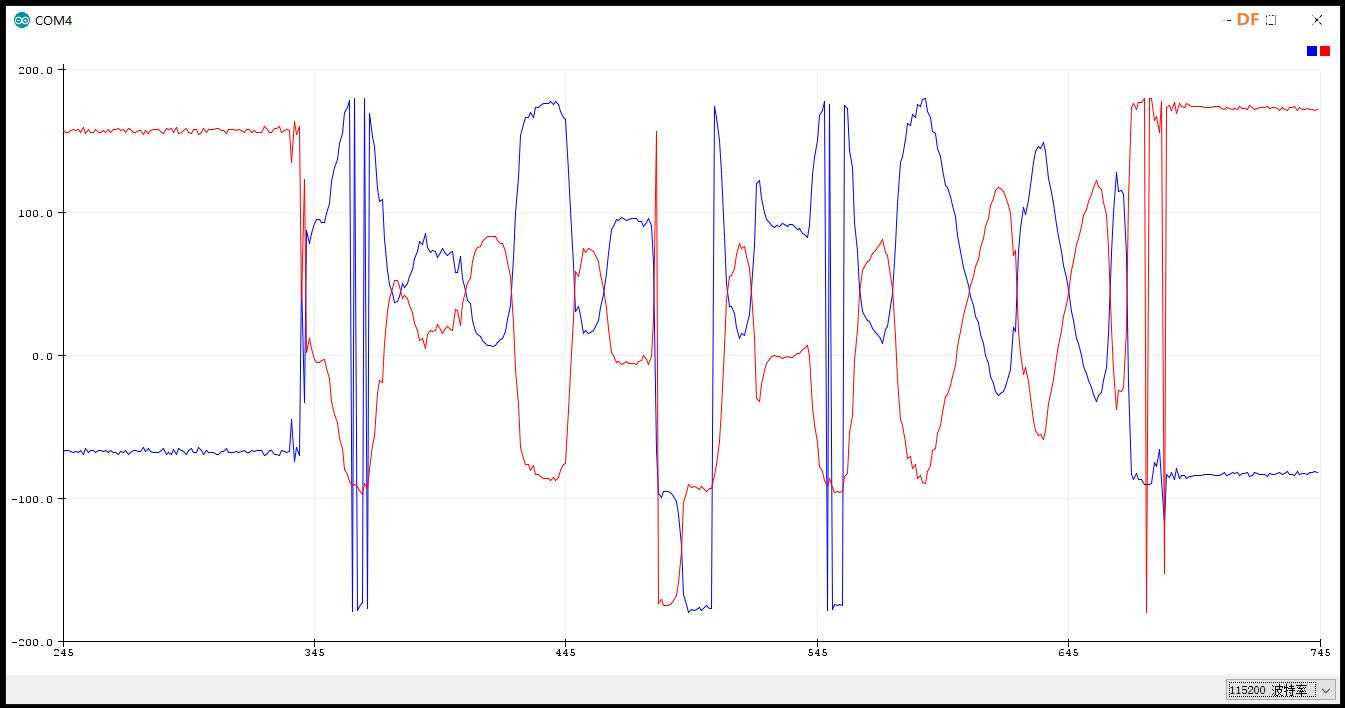
代码解读 1、传感器初始化:代码中首先初始化了ADXL345传感器,并设置了I2C总线的SDA和SCL引脚。这一步确保传感器能够正常工作。 2、数据读取:通过getEvent函数读取传感器的X、Y、Z轴加速度数据,这是计算俯仰角和滚动角的基础。 3、俯仰角计算:使用atan2函数计算俯仰角,公式为atan2(x, z),结果转换为角度。这里涉及X轴和Z轴的加速度数据。 4、滚动角计算:同样使用atan2函数计算滚动角,公式为atan2(y, z),结果转换为角度。这里涉及Y轴和Z轴的加速度数据。 5、数据输出:将计算得到的俯仰角和滚动角通过串口输出,便于观察和调试。延时100毫秒控制数据输出频率,避免过多数据输出导致串口缓冲区溢出。 通过这些步骤,你可以实时监测ADXL345传感器的俯仰角和滚动角。 实验串口返回情况 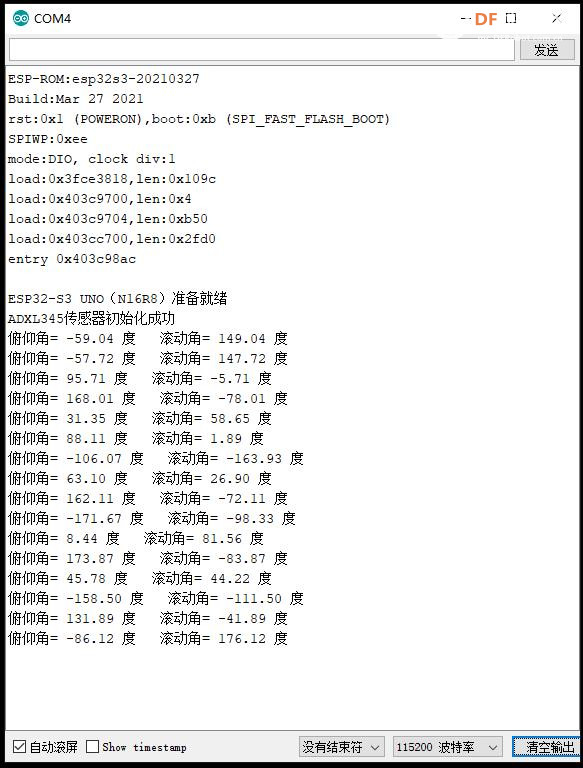 |
|
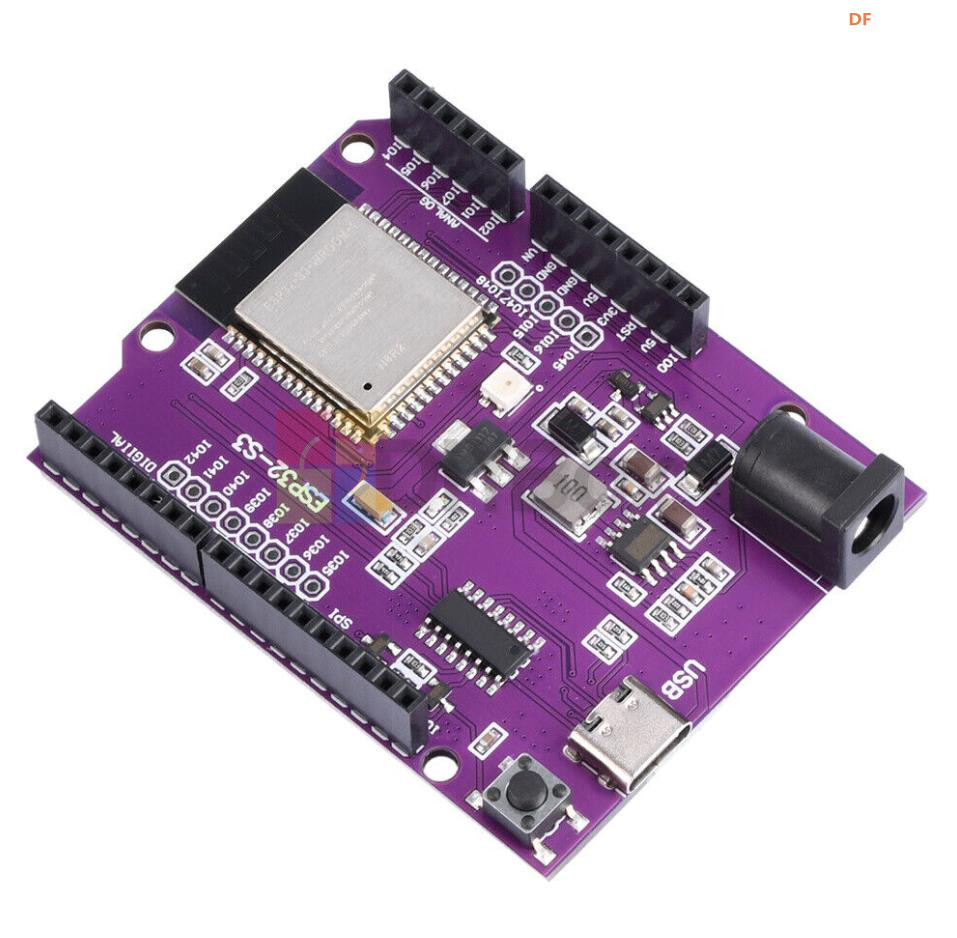
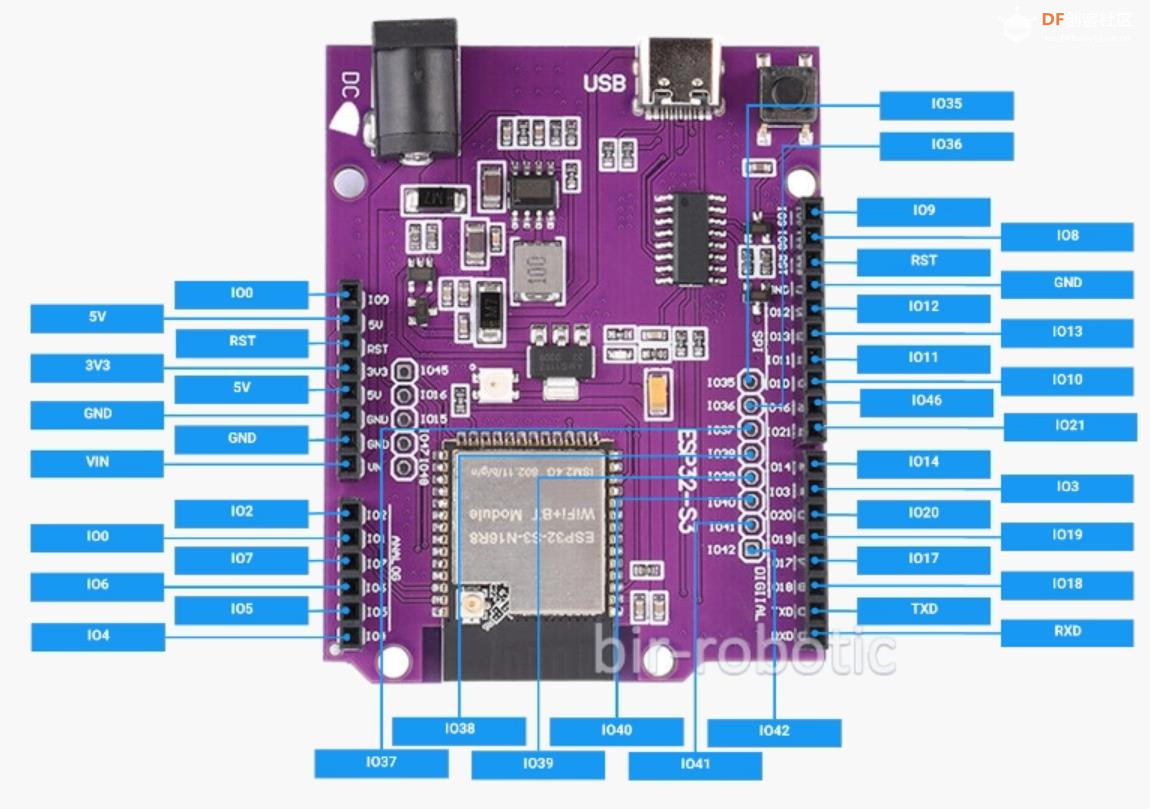
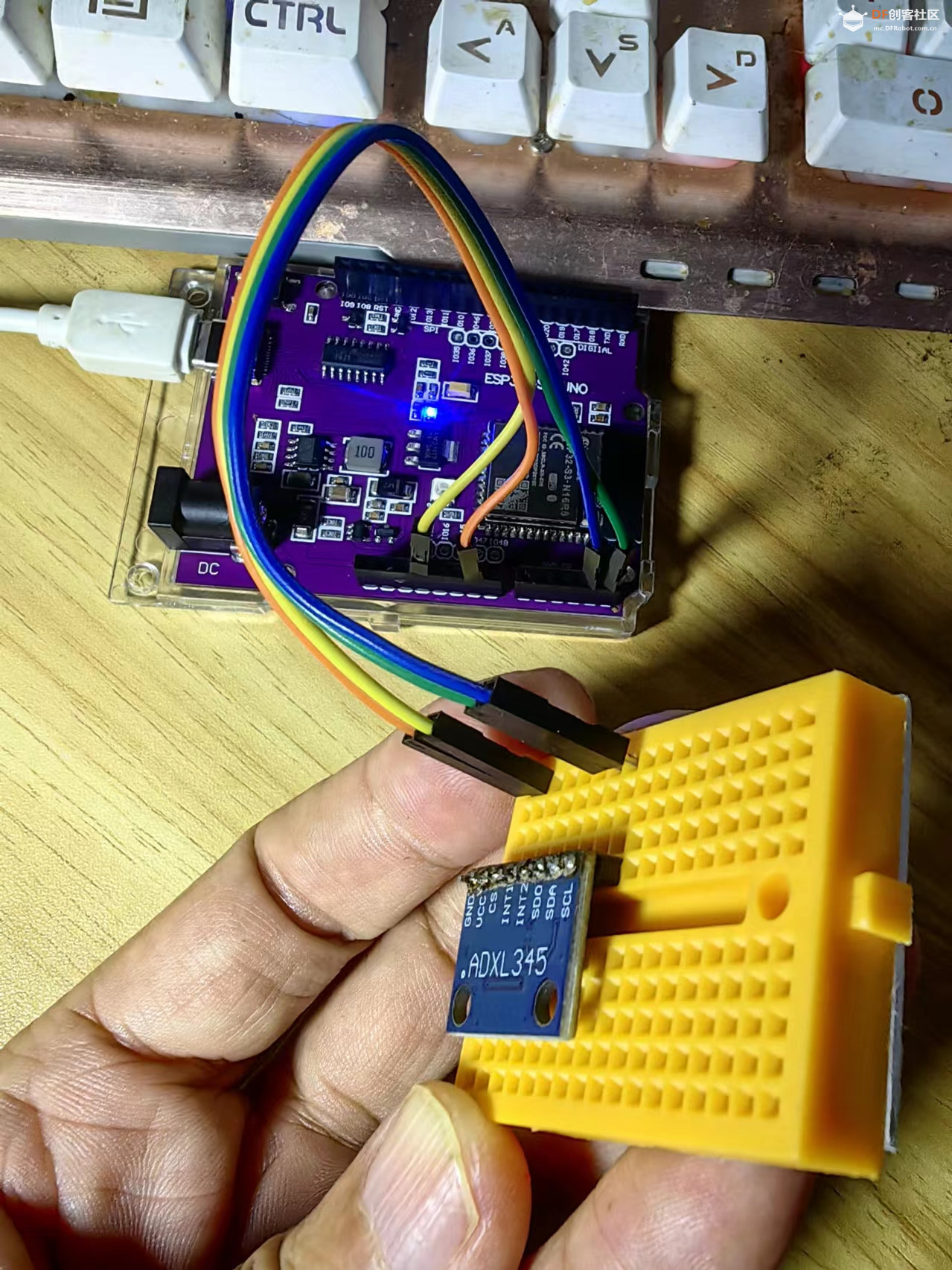
ESP32-S3 UNO 开发板是基于 ESP32-S3-WROOM-1-N16R8 微控制器的扩展板,基于 Arduino 开发板架构。凭借 2.4GHz Wi-Fi 和集成蓝牙 5.0 等高级功能,它为开发各种项目提供了一个强大的平台。ESP32-S3 UNO 配备 16MB 闪存和 8MB RAM,特别适用于物联网 (IoT)、机器人和其他工程项目的复杂应用。该开发板支持 Python 和 C 等流行的编程语言,可以在 Arduino IDE 开发环境中轻松编程和使用。该板的高级功能,包括对多种通信协议的支持和高处理能力,使其成为专业工程师和开发人员的理想工具。 实验记录视频 |



 沪公网安备31011502402448
沪公网安备31011502402448© 2013-2026 Comsenz Inc. Powered by Discuz! X3.4 Licensed

 置顶卡
置顶卡 变色卡
变色卡 千斤顶
千斤顶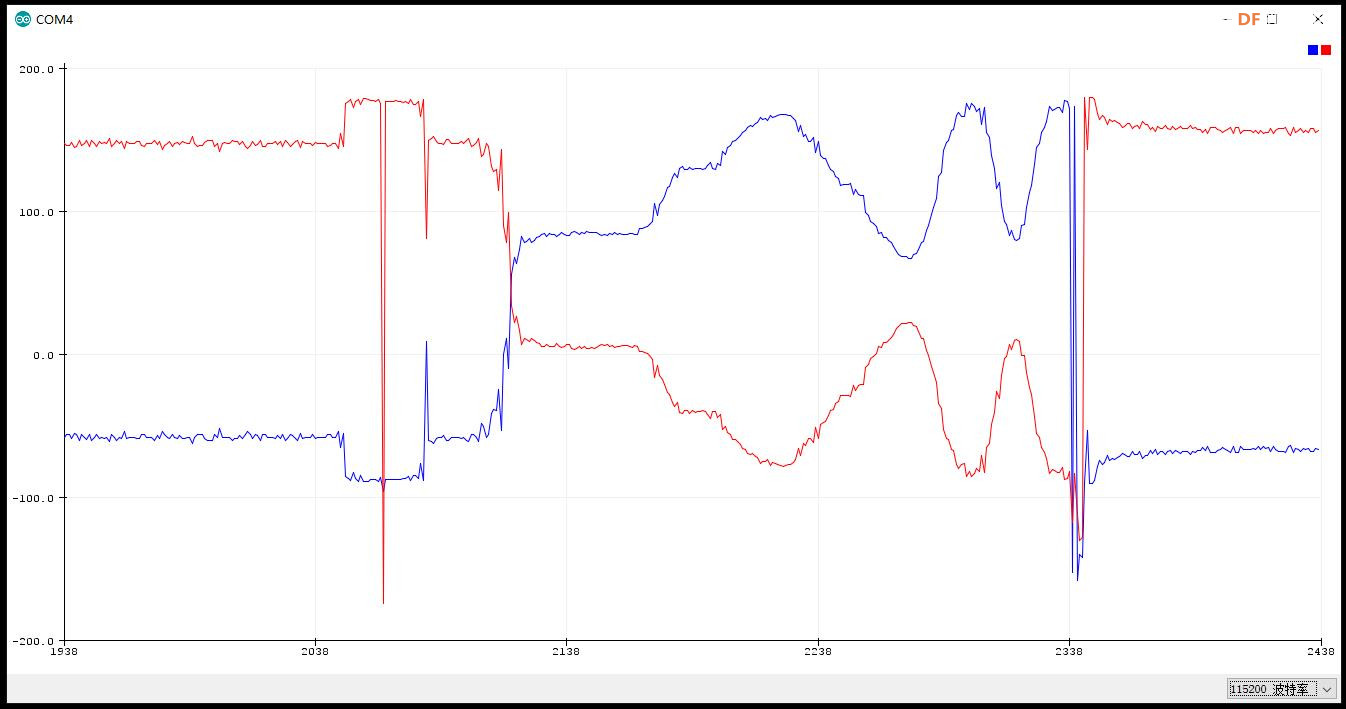

 萌萌哒新人
萌萌哒新人
 活跃会员
活跃会员
 宣传大使
宣传大使
 牛X认证
牛X认证
 创作达人
创作达人
 ARD DAY
ARD DAY
 摸鱼团员
摸鱼团员
 志“童”道合
志“童”道合
 编辑选择奖
编辑选择奖






